
果园自动对靶施药系统设计与试验
2018-08-10 09:27王亚飞许子和郭儒雅
农机化研究 2018年11期
张 伏,王亚飞,许子和,郭儒雅
(河南科技大学 农业装备工程学院,河南 洛阳 471003)
0 引言
随着国民经济发展和人民生活水平逐渐提高,对水果的需求量增多,为增加果树产量,在种植果树的过程中,会对果树喷药防止病虫害[1-2]。目前,我国大多采用高压喷枪进行淋洗式喷药,这易造成农药的利用率低及环境污染等问题[3-4]。为解决上述问题,采用对靶喷药是重要方法之一,对靶喷药是对目标进行喷药,非目标不喷或少喷[5-6]。对靶喷药始于美国,采用超声波传感器用于自动喷药[7]。后来国外研究学者相继采用光电传感器完成对靶喷药,或利用图像处理技术与喷药结合方式实现对靶喷药[8-9]。而国内发展较慢,在21世纪初江苏大学和中国农业大学开始对靶喷药的试验研究[10-12],后来国内学者相继采用光电传感器、微波传感器、超声波传感器等实现对靶喷药[13-14],但有关自动行走避障喷药的研究较少。为此,本研究设计了一种果园自动对靶施药系统,能够实现自主行走、垄间穿行、果树识别和对靶施药。
1 总体方案设计
1.1 系统总体设计原理
自动对靶施药系统由运动控制系统和喷药系统组成。本研究以四轮底盘小车为基础,由运动控制系统控制小车的前进及转弯,实现自动行走。喷药系统通过光电传感器识别靶来实现对靶喷药。
运动控制系统以四轮底盘小车为主体,小车采用后轮直流电机驱动,使用舵机控制前轮转向来实现小车前进及左右转弯。小车前方和左右两侧各安装有测距传感器用于测量小车在行驶时与各测障碍物之间的距离,以此实现避障和转弯。
喷药系统主体由药桶、水泵、喷头、电磁阀和光电传感器构成。水泵将药液泵至喷头端,红外光电传感器采集到信息经处理器控制电磁阀的开闭,电磁阀开闭控制喷头,两个电磁阀各自独立工作。根据自动对靶施药系统的功能,系统原理框图如图1所示。
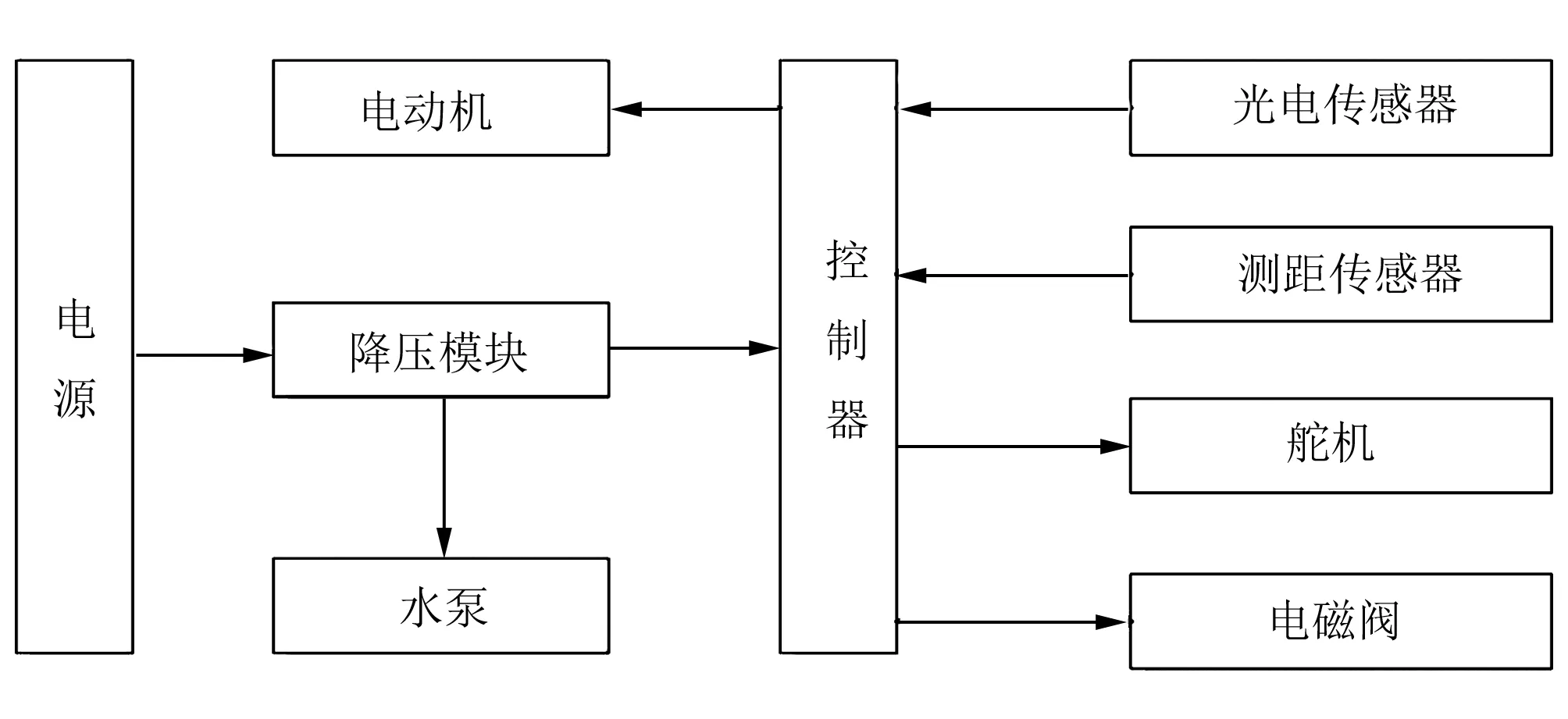
图1 系统原理框图Fig.1 The block diagram of the system
1.2 室内模拟试验场地
为在室内更好地模拟果园中的环境,使设计的自动对靶施药系统具有可行性和实用性,根据实际情况,在室内设计并搭建作业场地,如图2所示。
场地大小为160cm×250cm,垄宽为30cm,高12cm,长为80cm,作业通道宽度为40cm。围栏、垄和仿真果树为绿色,地面为灰色,吸水纸为白色。围栏、垄和仿真果树都采用木质材料制作。地面采用密实的防滑漏水材料铺设。吸水纸采用普通餐巾纸。
2 系统硬件设计
2.1 系统硬件组成
通过对自动对靶施药系统的功能分析,确定系统硬件组成:四轮底盘小车1个、中心控制器1个、光电传感器2个、测距传感器3个、电磁阀2个、水泵1个、电源1个、降压模块1个、药箱1个、水管1m,以及喷头2个。系统布置图如图3所示。

1.转向舵机 2.驱动电机 3.前侧测距传感器 4.左侧测距传感器 5.右侧测距传感器 6.左侧光电传感器 7.右侧光电传感器 8.左喷头 9.右喷头 10.药桶 11.控制器图3 系统布置图Fig.3 The system distribution diagram
2.2 主要系统硬件选型
2.2.1 控制器
控制器是自动对靶施药装置的核心,控制器通过控制电机实现小车前进、转弯等运动,通过控制光电传感器及电磁阀的开合实现对靶喷药的功能, 因此对
控制器要求较高。
本研究采用Arduino uno r3型号的控制板,核心处理器为ATmega328。是AVR系列的单片机。Arduino uno有14路数字的输入或者输出口,14路中有6路是用来进行PWM输出的,Arduino uno还有6路模拟的输入。Arduino uno还包括1个石英晶体振荡器(频率为16MHz)、1个复位的按键、1个USB接口、1个电源接头,以及1个ICSP数据头。
2.2.2 传感器
根据距离及性能要求,光电传感器采用E18-D80NK型号的红外光电传感器,其既可接收光线也能发射,测量距离范围3~80cm。红外测距传感器采用GP2Y0A41SK0F型号的测距传感器,为测距传感器单元,主要包括的有信号处理电路组、位置敏感探测器及红外发射二极管,对各种物体的距离检测,不易受到环境温度和操作时间的影响。由于采用三角测量的方法输出电压对应检测距离,该装置也可用作接近传感器,测距范围为4~30cm。
2.2.3 电磁阀
电磁阀用于控制喷药系统中的喷头开关,从而实现喷药,本研究采用常闭型的微型电磁阀,大小是21mm×43mm,进出口的内径为2.5mm,外径5.5mm,线长33mm,需要额定电压为直流电压12V,电流不超过120mA。
2.2.4 降压模块
由于控制器、传感器、水泵、电磁阀所需的额定电压不同,本研究采用12V的直流电源,需要降压模块来实现不同元件的供电需求。采用DSN6000AUD自动升降压模块,模块性质为非隔离升压(BOOST),整流方式是非同步整流,输入电压最低为3.8V,最高可达32V,输出电压最低为1.25V,最高可达35V,输入电流不超过3A,转换效率<94%(压差越大,效率越低),开关频率为400kHz,负载的调整率和电压的调整率都为0.5%左右。
2.2.5 水泵
药箱里的水由水泵抽出经过管子到喷头,本研究采用DC1020型号的微型水泵,扬程为150cm,功率为3W,流量为200L/h,需要额定电压为3.5~9V,出水口为8mm,尺寸为39mm×38mm×28mm。
2.3 系统总体原理图
根据系统控制要求,设计整个果园自动对靶施药系统原理图。Arduino uno控制板中I/O口分配表、 原理图分别如表1和图4所示。
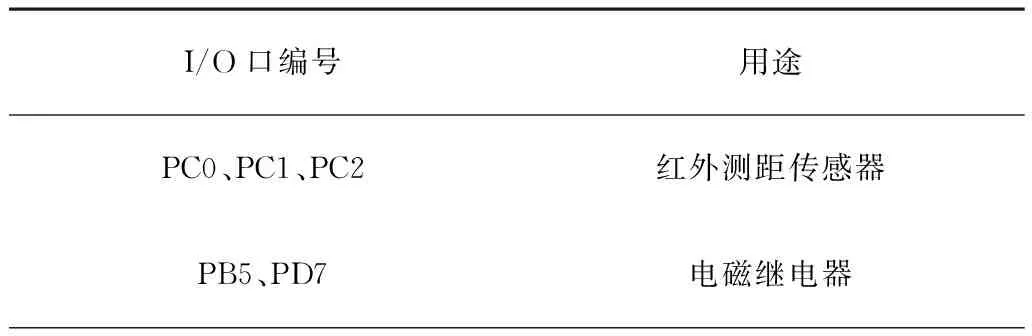
表1 Arduino uno r3控制板中I/O口分配表Table 1 The distribution of the I/O
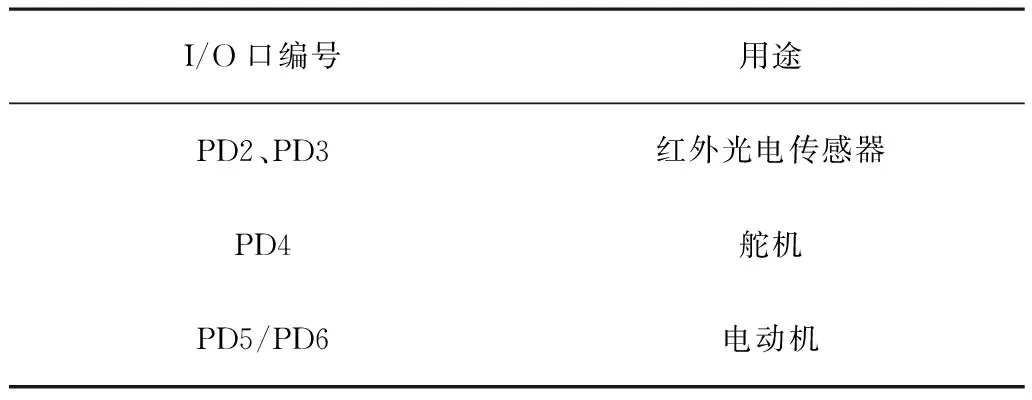
续表1

图4 系统原理图Fig.4 System schematic
3 系统软件设计
3.1 运动控制系统软件设计
在室内试验场地的基础上,设定小车行驶的轨迹,小车运动轨迹如图5所示。
根据小车左侧和右侧的红外测距传感器设定距离来控制小车保持直行,根据小车前侧、左侧以及右侧红外测距传感设定距离来控制小车转弯。具体流程如下:
小车从入口驶入,接收到第1次转弯信号,90°右转直行;接收到第2次转弯信号时,180°左转直行;接收到第3次转弯信号时,180°右转直行;接收到第4次转弯信号时,180°左转直行;接收到第5次转弯信号时,90°左转直行直至驶出轨道。
行驶特点及实现方法(X、Y的值均由试验所得):
1)小车启动后驶入入口,经过一段延时右转,小车实现第1次转弯后,当左侧红外距离传感器检测小车距离左侧垄Ycm时,小车保持直行。
2)从第2次转弯到第4次转弯信号,接收偶数次转弯信号后180°左转直行,接收奇数次转弯信号后180°右转直行。为保证转弯和直行阶段小车不碰围栏和垄,转弯实现方法如下:①180°右转直行。调用前、右侧红外距离传感器,当前方红外距离传感器检测小车距离前方围栏Xcm时右转,根据测量距离调整右转时小车前轮转向角度,使小车与右侧垄保持距离Ycm。②180°左转直行。调用前、左侧红外距离传感器,当前方红外距离传感器检测小车距离前方围栏Xcm时左转,根据测量距离调整右转时小车前轮转向角度,使小车与左侧垄保持距离Ycm。
3)小车第4次转弯后,当前方红外距离传感器检测小车距离前方围栏Xcm时(第5次转弯信号),90°左转直行;只有小车右侧有围栏,故调用右侧红外距离传感器数据,调整前轮转向,保持小车距右侧围栏Ycm,以保证直线行驶在通道中。当小车驶出果园时,红外测距传感器检测到距离值大于Zcm时,关闭驱动模块,小车停止在启动区。
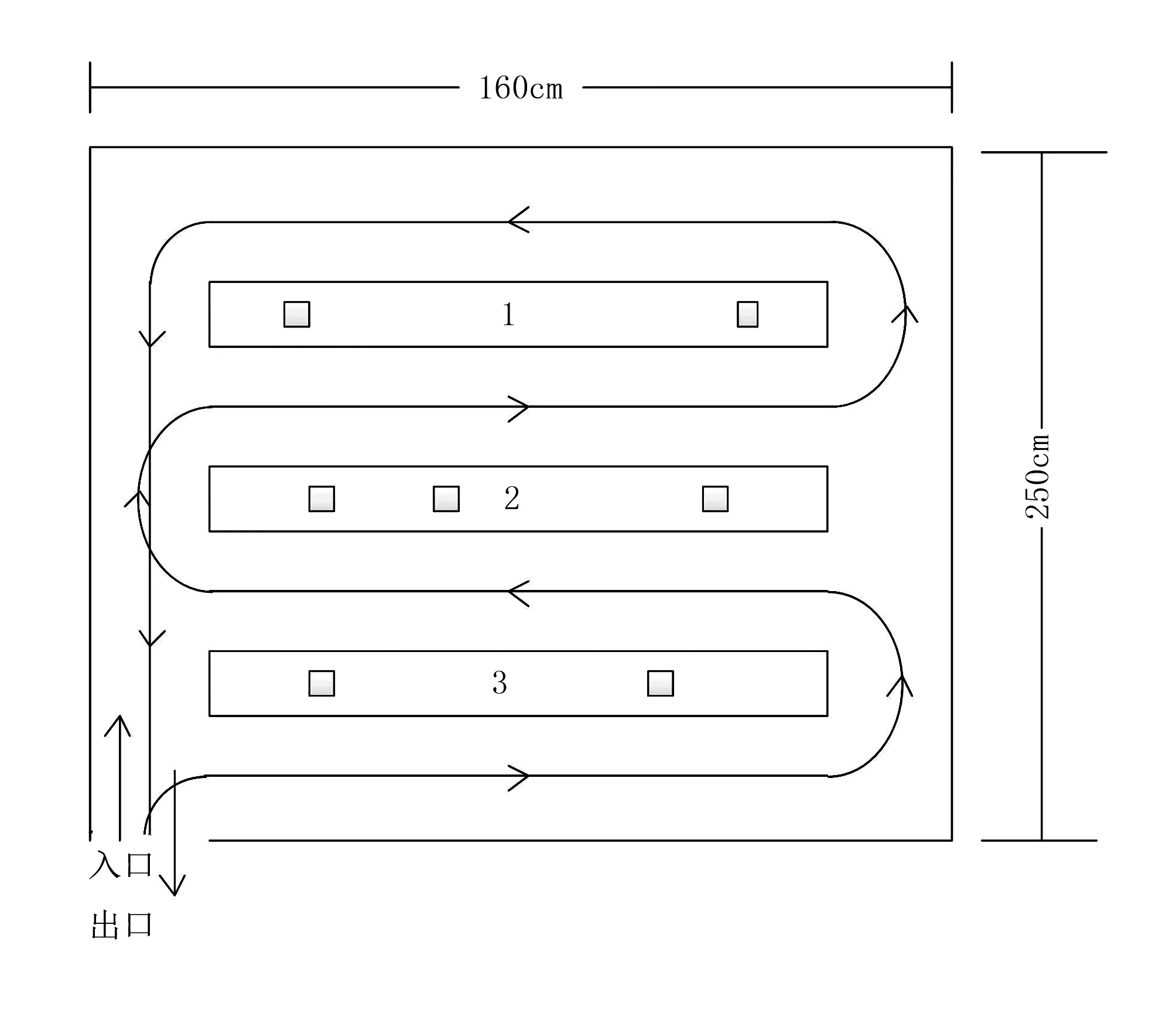
图5 小车运动轨迹Fig.5 The trajectory diagram of car
根据方案设计,运动控制系统程序框图如图6所示。
3.2 喷药系统软件设计
小车驶入果园后右转,进入通道,两个红外光电传感器各自独立检测,当检测到果树后,打开电磁阀,同侧喷头向果树喷药;第2次至第4次转弯过程,关闭喷药电磁阀,防止向果树非施药侧喷药;在第5次转弯后,关闭喷药电磁阀,停止喷药,直至小车驶出果园。系统的喷药程序框图如图7所示。
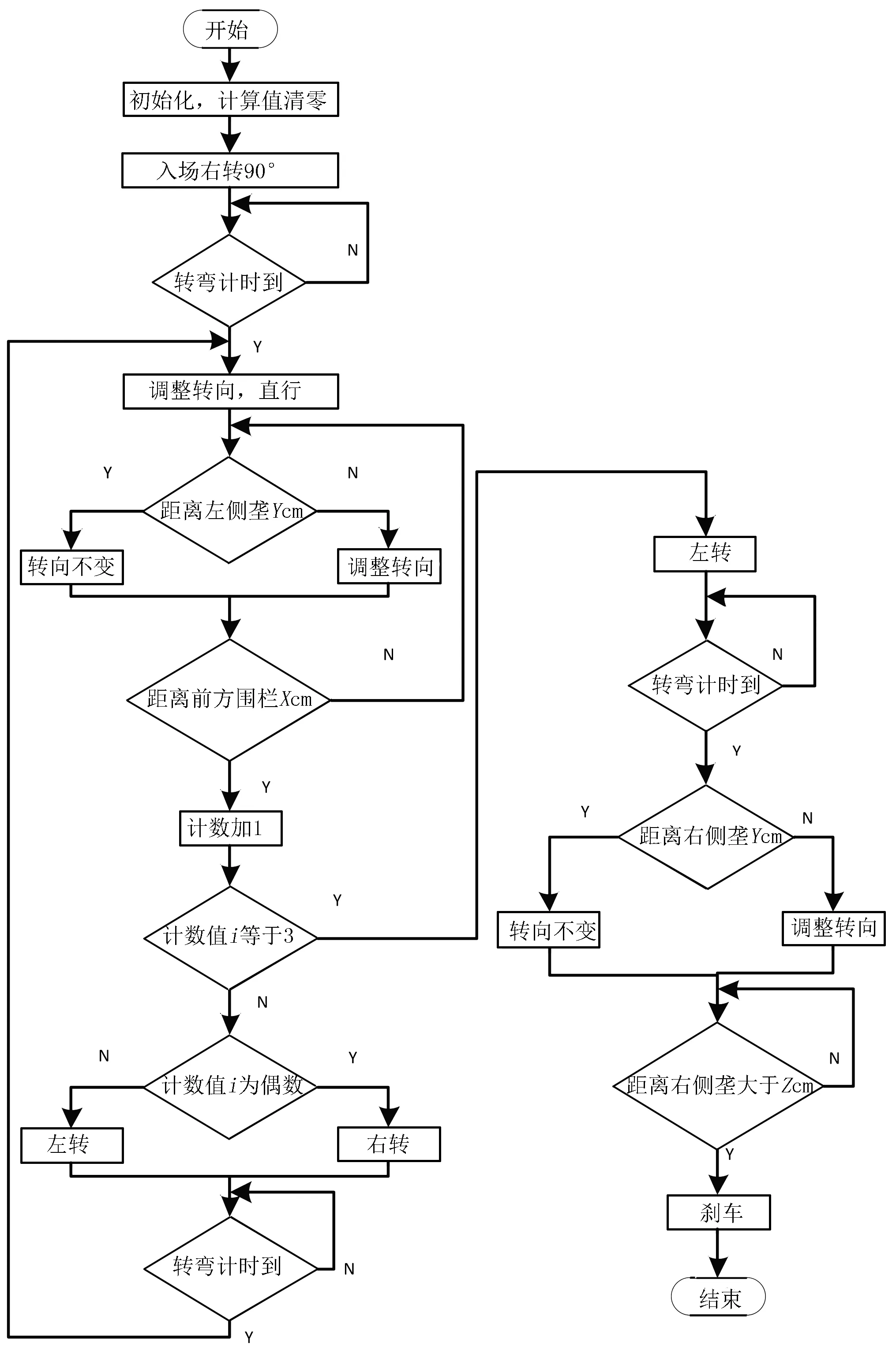
图6 运动控制系统程序框图Fig.6 The block diagram of the motion control system
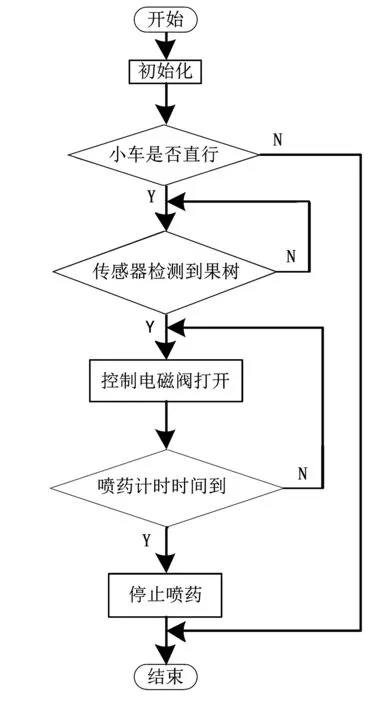
图7 喷药系统的程序框图Fig.7 The block diagram of the spray system
4 系统组成及测试
4.1 系统组建
根据系统硬件结构及室内试验场地设计要求,为更精确地实现药箱、水管、喷头、支架的组装,用SolidWorks软件绘制实物三维图,系统模型如图8所示。
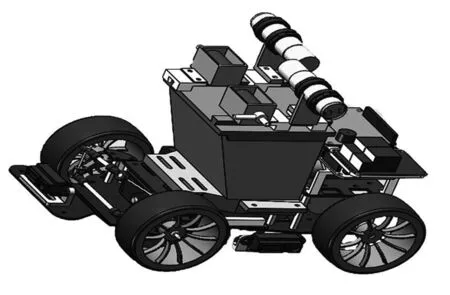
图8 果园自动对靶施药系统模型Fig.8 The model of orchard automatic target application system
4.2 系统测试
1) 运动情况测试。在事先设计好的室内场地内实际测量,自动对靶施药机器人运行速度约为0.5m/s,并能顺利通过直行、转弯,未碰到周围的垄,最终走出场地,停止运动。
2) 喷药情况测试。经过实际测试,当自动对靶施药机器人运行到有靶位的地方,经红外光电传感器传输信号,机器人能迅速将药水准确喷向靶位,且喷头处未出现漏水现象,喷药时间约为20ms。实物测试图如图9所示。

图9 自动对靶施药模型系统实际模型Fig.9 The automatic model of target system for automatic target application
5 结论
本文研制的自动对靶施药机器人实现了自动对靶喷药,能有效减少农药浪费,降低环境污染;能按照预先设定的轨迹自行行走,可减轻劳动力;。该系统结构简单,成本低,具有较好的应用价值。
猜你喜欢
信息记录材料(2022年3期)2022-05-17
现代青年·精英版(2022年3期)2022-04-06
今日农业(2021年13期)2021-11-26
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
农家参谋(2020年6期)2020-07-29
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
汽车文摘(2015年11期)2015-12-02
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
