休闲园林割草机器人设计及性能测试
2018-08-10 09:22陈峰,赵萍
农机化研究 2018年10期
陈 峰,赵 萍
(1.沈阳理工大学,沈阳 110168;2.沈阳农业大学,沈阳 110866)
0 引言
随着园林城市化、休闲化及多元功能化的发展,对于园林景观的功能及要求日益提高,作业于园林草地的割草机器人作为一种应用广泛的草坪机械,起着不可或缺的作用。为进一步达到高效修整草地、美化园林的目标,不断对割草机器人进行优化设计、完善工作性能势在必行。割草机器人的自动控制作业性能决定了其园林修饰及作业效率的高低。图1为应用于休闲园林的割草机器人外观简图。

图1 休闲园林割草机器人外观简图
休闲园林割草机器人集准确识别、自动割草、智能避障及返回自充电功能于一身,通过内置电动马达、精度高的传感装置及输入控制程序实现割草作业。割草机器人的工作首要环节是对草地图像进行精准识别,通过不间断进行信息融合与提取、路径实时规划与调整,在导航控制定位的指导下开展工作边界建立与割草作业。其中,传感与控制至关重要。本文将对休闲园林割草机器人的关键部件进行设计改进试验,达到更为人性化的性能要求。
1 设计方案
根据休闲园林智能割草机器人的工作原理,在传统割草作业的基础上,对其整体的控制方案进行设计优化,主要控制组成如图2所示。
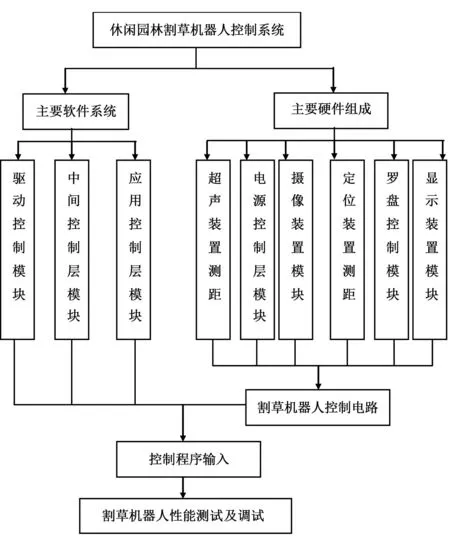
图2 休闲园林割草机器人控制系统组成
此设计方案主要包含割草机器人的软硬件、路径规划与路障等方面的改进。针对软件,主要是控制驱动的优化,包括中间层、应用层及中心驱动模块的细节设计;针对硬件,在定位、超声测距和罗盘控制等方面进行优化整合,形成能够进行闭合协调作业的控制回路,在控制程序的驱动之下,展开进一步实地性能测试,达到良好作业效果。
1.1 软件系统
休闲园林割草机器人的软件部分主要包括摄像装置控制程序及电机驱动程序等,如何成功协调各控制系统的运作是优化的关键。表1给出摄像模块的主要文件程序接口信号,摄像、传递、控制、显示由此程序段调用执行。在电机驱动控制阶段则设计为闭环控制,控制流程如图3所示。
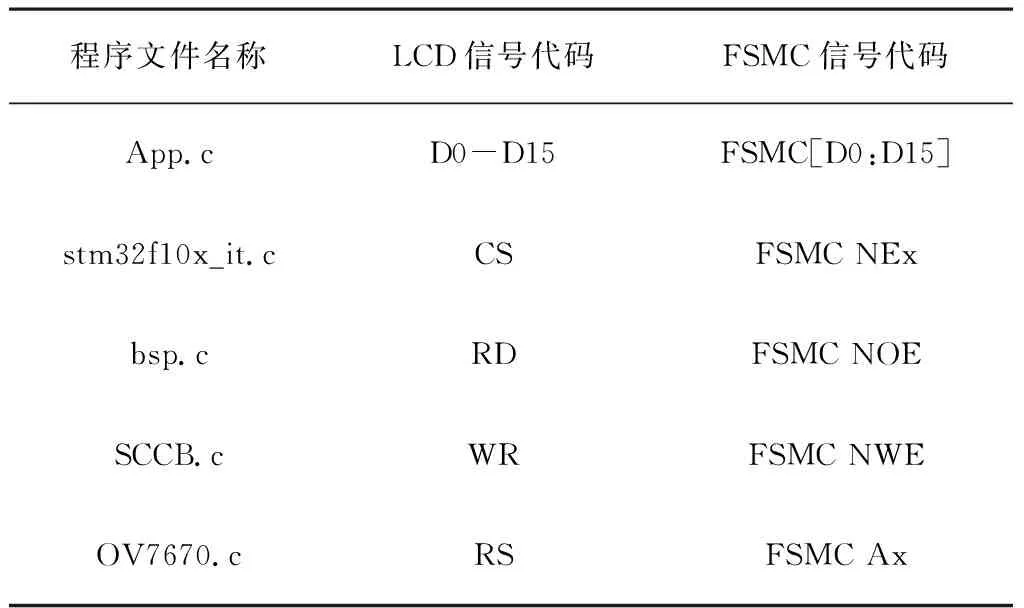
表1 割草机器人摄像装置主要程序及接口信号
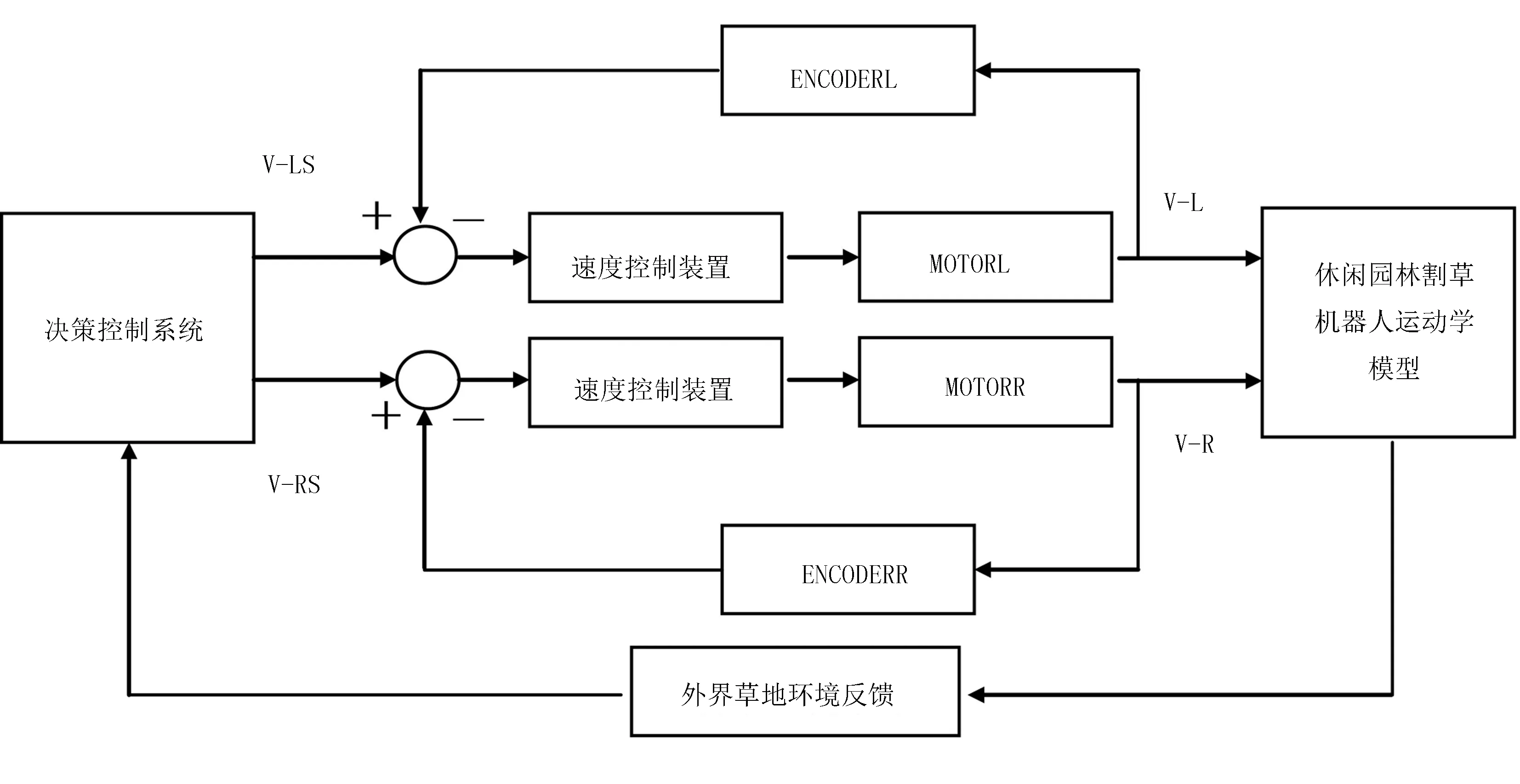
图3 休闲园林割草机器人简易闭环控制
通过多任务嵌入控制各操作执行硬件装置,利用OS TaskCreate函数,实现各个传感装置之间的有序动作,最终控制割草机器人高效自主识别、智能并趋于人性路径规划。关键技术程序为:
int8 OSTaskCreate {
void (*task)(void *pd),
void * pdata,
OS_STK * ptos,
INT8U prio}
Void main (void)
{ ……
OSInit ();
OSTaskCreate (TaskStart,……);
OSStart ();}
void TaskStart (void *pdata)
{ ……
OSStartInit ();
for(; ;)
{ TaskStart代码
}
}
1.2 硬件配置
在软件程序控制下,对割草机器人的电机驱动、电路控制、行走装置及割草执行等装置进行设计。硬件配置关键在于传感模块的优化与电机型号选取。内部微型刀片割草机构设计还应考虑传动与碰撞等因素。工作时,在能量供应系统匹配前提下,通过超声波传感装置获取休闲园林周边环境作业信息,在中央电机与微处理控制系统的调配下,驱动行走机构(包括码盘、减速、转向等构件),螺旋连续传动方式自动调高,实现割草刀盘的升降与割草作业。硬件配置参数如下:①KS103超声测距装置;②HJ-IR2红外避障部件;③锂电池电源模块:电流10Ah,电压24V;④调高电机,功率60W,转速4 000r/min。
2 路径规划与避障
2.1 路径规划优化
利用标准草地图像识别理论模型,进行草地颜色比例与草地边缘比例的参数设定,以及草地与非草地及边缘识别,并准确通过视觉传感装置进行角度方位反馈。HSI基础判别方法为
针对边缘控制算法,则采用如下公式进行判断。若大于某一设定范围值,则智能割草机器人给以判定结果并传递信息至中央控制系统发出相应动作,即
G(x,y)=|Δxf(x,y)|+|Δyf(x,y)|
(1)
2.2 避障技术融入
在路径规划好的基础上,得出割草机器人在各行走部件的控制下运动轨迹,如图4所示。
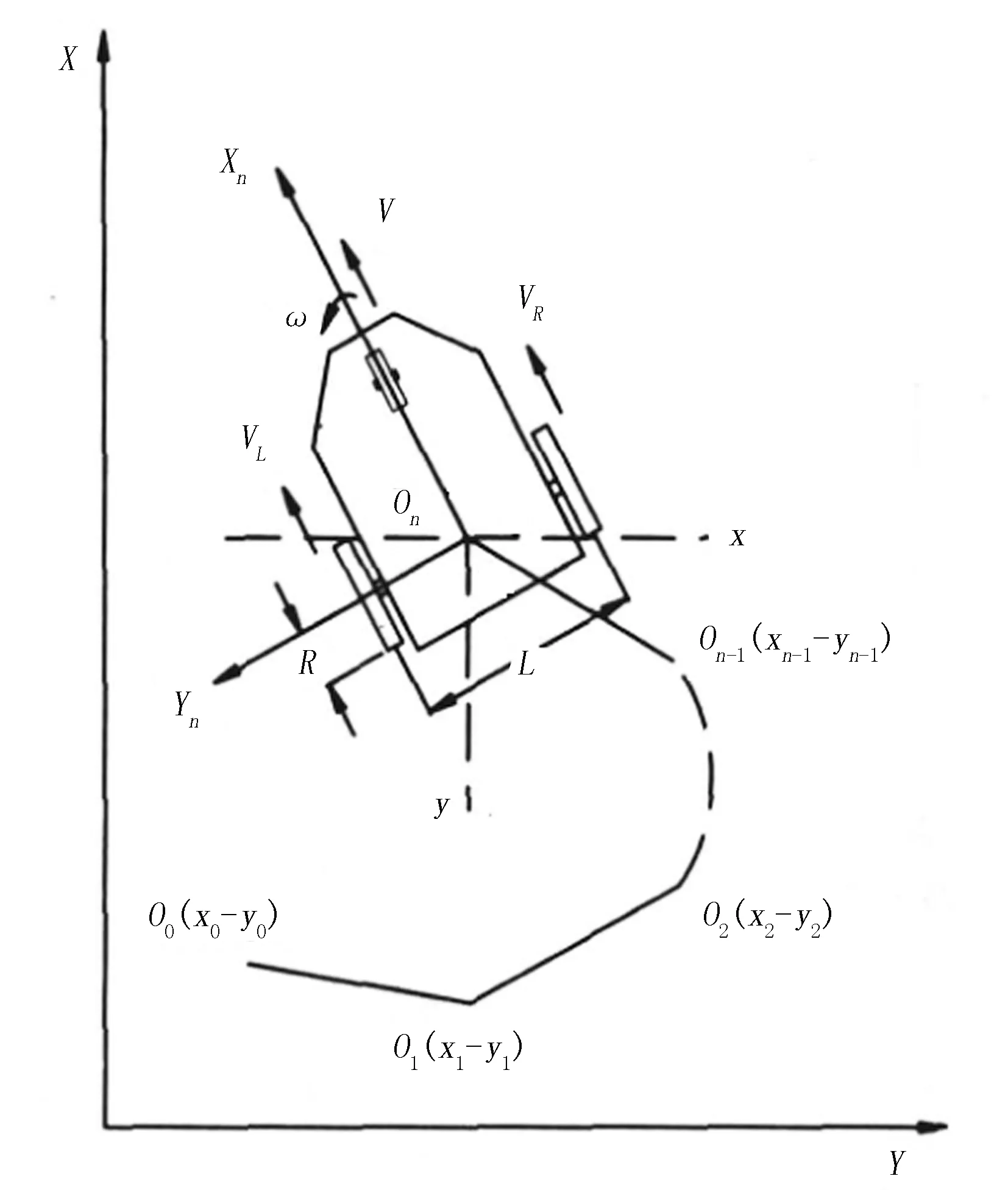
图4 休闲园林割草机器人运动学模型
结合机体的运动学原理,给出割草机器人的运动学模型,即
融入割草机器人避障技术,该避障过程关键点在于对草地进行模拟视觉化识别,对割草机器人周边进行A、B、C、D区域划分,如图5所示。利用超声波收发脉冲的优势,结合摄像头定位调整功能,实现智能非接触避障,即在割草机器人与障碍物进入一定范围内实现快速转角运动,及时改变割草作业方向。
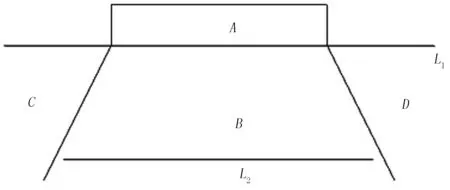
图5 休闲园林草地划分区域示意图
3 性能测试
利用矩形思维建立试验的环境模型,进行割草机器人全区域覆盖及路径实时调整优化,表2给出所选驱动电机关键技术参数。草地修整效率对比环节,实地性能测试的割草模块针对休闲园林草地的品种特性等在合适的刀片作用下,实时实地发挥调高模块性能,修剪整齐,且在障碍碰撞及避让模块系统下通过控制准确让刀,进而有效地避开硬质障碍物。各模块间的相互协调作用使割草效率大大提高,可达2.5~3m2/min。
表2 割草机器人驱动电机关键技术参数表
Table 2 The table of key technical parameters of the Mowing robot drive motor
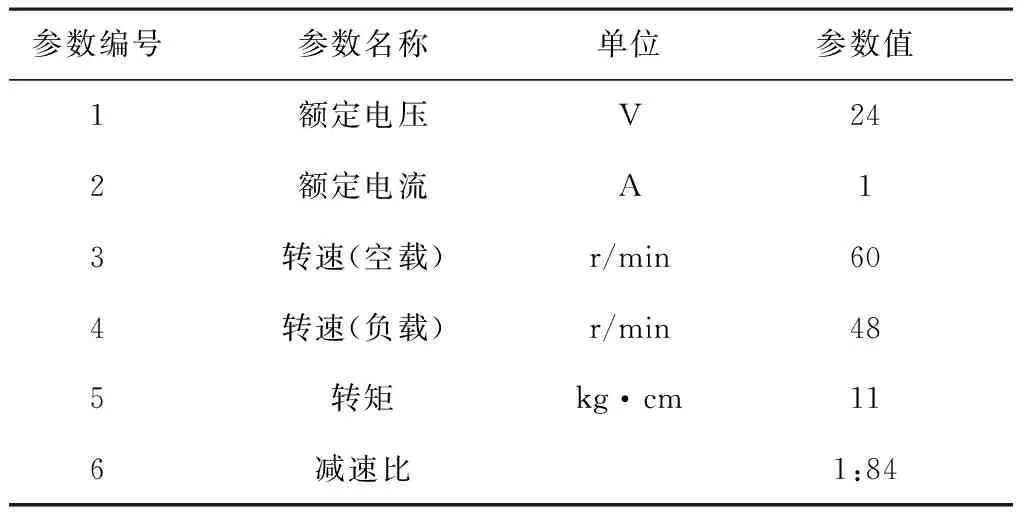
参数编号参数名称单位参数值1额定电压V242额定电流A13转速(空载)r/min604转速(负载)r/min485转矩kg·cm116减速比1:84
休闲园林割草机器人此次设计的核心在于行走作业模块,采用PWM方式进行无级调速。通过对割草机器人行走模块进行反复性能测试与设计期望值进行对比(见表3),分别从割草机器人样机的前进速度、爬坡能力、定位范围等6大项性能进行实测。结果表明:割草机器人测试行走与预期设计吻合度较好,性能测试具有可行性。
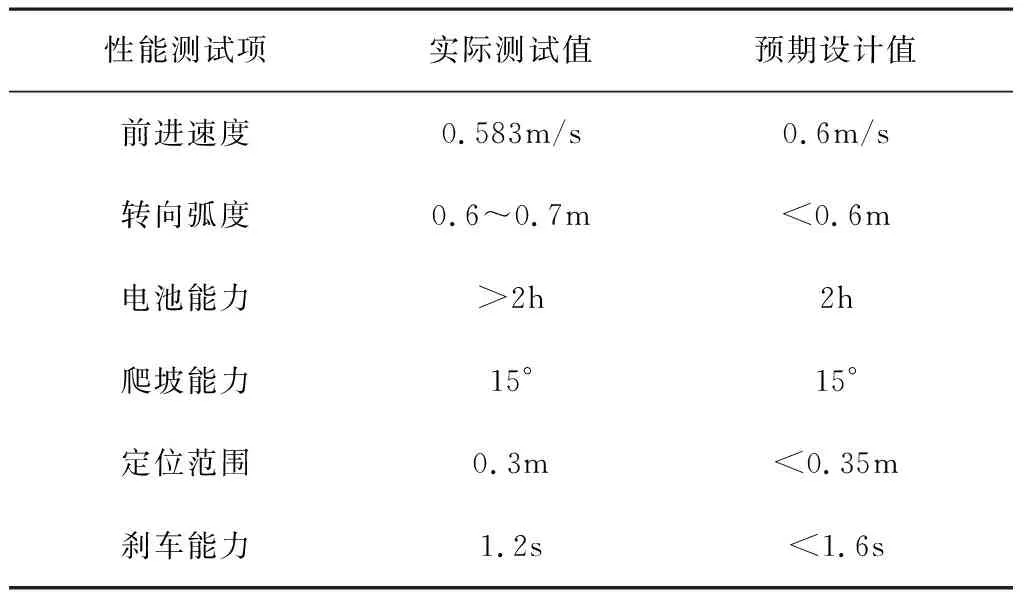
表3 割草机器人性能测试参数对比
4 结论
在考虑智能割草机器人性能提升与成本兼顾的基础上,针对休闲园林用割草机器人工作特点,以最小限度消耗能量为原则,有效融合当前割草机器人自主识别、全区域覆盖作业与避障实现等关键控制技术,从而对割草机器人的视觉感知系统、控制作业及避障系统等发面展开优化设计。同时,对硬件装置摄像头、驱动电机等同步匹配选型,控制驱动程序及电路完善,并对其去进行性能测试,实现预期割草机器人路径识别与轨迹优化。结果表明:此割草机器人的设计及优化可行,整体工作性能良好,可为相关专业人员深入开展割草机器人的智能化、通用化及模块化设计提供有益的参考。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
幼儿100(2020年31期)2020-11-18
艺术品鉴(2020年9期)2020-10-28
文苑(2020年12期)2020-04-13
疯狂英语·初中版(2019年4期)2019-09-10
金桥(2018年6期)2018-09-22
现代装饰(2018年3期)2018-05-22