
永磁同步电机位置伺服系统滑模控制研究
2018-07-31 02:28:02蒋梦琴高强刘静宝曾令梦侯远龙
电气自动化 2018年2期
蒋梦琴, 高强, 刘静宝, 曾令梦, 侯远龙
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.北方重工业集团有限公司科研所,内蒙古 包头 014033)
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM) 以高效率、高可靠性及结构简单等优点著称,如今被广泛应用于现代交流伺服系统中[1]。但PMSM是一个多变量、强耦合的非线性系统,在PMSM位置伺服系统中常常存在摩擦甚至机械传动间隙等[2]54,还有系统外部干扰的存在,都制约着电机控制性能的提高。常规PID控制已经很难满足高精度、高性能的位置跟踪。
近年来,滑模控制因其具有快速动态响应和对系统参数摄动及外部干扰不敏感等优点,被广泛应用于电机控制中[2-3]14,但其存在“抖振”问题,影响控制精度,故需考虑抑制抖振。故有Terminal滑模控制[4]策略的提出,其较传统的线性滑模控制来说,无切换项,故可有效地消除抖振现象。Terminal滑模控制针对的是跟踪误差收敛性问题,它在滑动超平面的设计中引入非线性函数,构造Terminal滑模面,使跟踪误差可以在有限时间内收敛到零;然而,Terminal滑模控制在收敛时间上未必是最优的,为此,文献[5-6]提出了一种新型全局快速Terminal滑动模态,现被广泛应用于电机控制领域。
另外,通过干扰观测器,可以对系统中的部分不可测状态实现控制,如可以观测系统外部干扰。文献[7]设计了一种基于二元控制理论的干扰观测器,它用观测到的干扰来作为前馈补偿,以此减弱了抖振。
本文将全局快速终端滑模控制(Global Fast Terminal Sliding Mode Control,简称GFTSMC)技术应用于PMSM位置伺服控制系统中,来提高其跟踪性能;且为了补偿外部扰动对系统的影响,设计指数收敛干扰观测器,以实现存在外部扰动及不确定条件下的位置跟踪控制。
1 永磁同步电机数学模型建立
PMSM是具有非线性、强耦合的动态系统,为使电机具有好的控制特性,采用矢量变换进行线性解耦控制。为了简化分析,作如下假设[8]:
(1)忽略铁芯的饱和效应;
(2)气隙磁场呈正弦分布;
(3)不计涡流和磁带损耗;
(4)转子上无阻尼绕组,永磁体没有阻尼作用;
(5)采用id=0的矢量控制方法。
以表面式永磁同步电机为例,它是凸极式永磁同步电机的特例,满足Ld=Lq=L。
可得在dq坐标系下,其线性化数学模型如下:
(1)
ud=-ωeLiq
(2)
Te=1.5pnψfiq=Ktiq
(3)
(4)
式中:ud与uq分别为dq坐标系上的电枢电压分量;iq与L为q轴的电枢电流分量、等效电枢电感;R与ωe(=pnωm)分别为电枢绕组电阻和电角速度;ψf与pn为永磁铁对应的转子磁链和电机的极对数;Te与TL分别为电机的电磁转矩和系统等效到电机轴的负载力矩;B与J分别为系统黏滞摩擦因数和等效转动惯量;K为电磁转矩系数。
PMSM位置伺服系统采用三闭环控制,电流环采用滞环控制,可以把包括电流环在内的PMSM、逆变器看成 “被控对象”,电流环简化为比例系数为1的比例环节[9]。本文中的滑模控制器是将位置与速度控制器合二为一。
令x1=θm,x2=ωm,可得PMSM的状态方程为:
(5)
将上式改写成:
(6)

2 控制器设计
PMSM位置伺服系统框图如图1所示,下面分别进行全局快速终端滑模控制器和干扰观测器的设计。
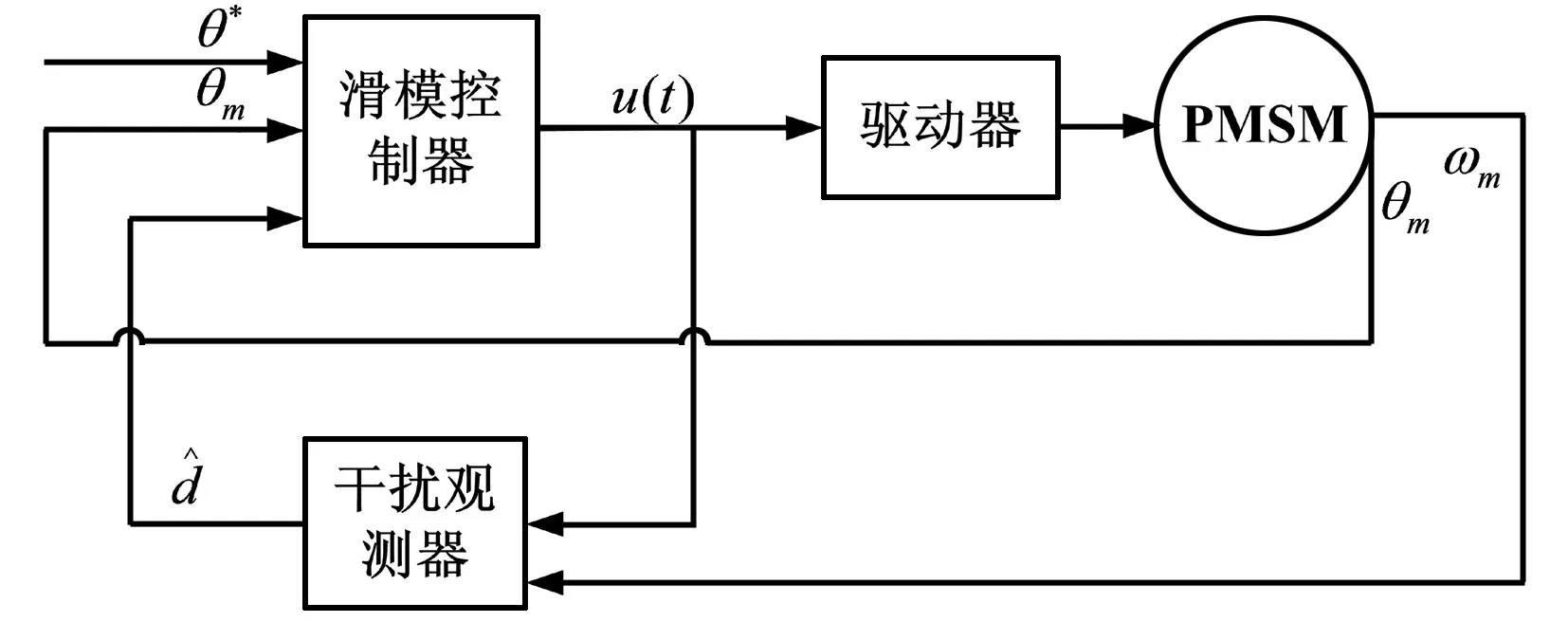
图1 PMSM位置伺服系统框图
2.1 全局快速终端滑模控制器设计
设参考位置信号为θ*,且它是足够光滑的,几乎处处二阶可导;θm为电机的实际位置。故位置误差方程可以定义如下:
e=θ*-θm
(7)
则:
(8)
设计GFTSM的滑模面为:
(9)
式中:α0,β0>0为常数;p0,q0为奇数且p0>q0。
设计全局快速终端滑模的控制律为:

(10)

2.2 干扰观测器设计
干扰观测器的设计思想[10-12]为:设计观测器来对电机负载干扰力矩进行估算,进而对系统进行扰动补偿,以提高系统的抗干扰能力。选择指数收敛干扰观测器,其基本思想就是用观测器的估计观测输出与实际输出的差值,来修正估计值。
将式(4)改写为:
(11)
则:
(12)
又
(13)
则:

(14)
则干扰观测器设计为:
(15)
则:

(16)
(17)


(18)
从而得到观测误差方程为:
(19)
解为:
(20)
式中:K决定观测器的收敛精度。
最后对系统控制律式(10)作相应的修改:

(21)
3 稳定性分析
全局快速终端滑模控制器的稳定性证明如下:
(22)

(23)

干扰观测器的稳定性证明如下:


(24)

(25)
以上证明结果表明,设计的控制器是稳定的,任何跟踪误差轨迹均能在有限时间内收敛到零。
4 仿真分析
本节通过MATLAB/Simulink软件搭建系统控制模型,进行计算机仿真来验证所提出控制器的有效性。
永磁同步电机的参数如下:R=2.875 Ω,L=0.008 5 H,J=0.001 kg·m2,pn=4,φf=0.175 Wb,B=0.000 143 N·m·s/rad。
滑模控制器的参数设计如下:α0=2,β0=1,q0=5,p0=9,q/p=1/3,φ=100,L=2,η=1。干扰观测器的参数设计如下:K=80。
4.1 阶跃响应仿真
阶跃输入:θ*=4.18,单位:弧度,即240°位置,仿真时间5 s。在仿真2 s处加上一个干扰力矩信号,该信号设为持续0.2 s的幅值为5 N·m的方波干扰。仿真试验设计为二种控制方法的对比,即常规PID控制方法和本文提出的控制方法,比较其位置跟踪性能及在干扰发生时的系统鲁棒性。
仿真图如图2所示,其中图2(a)为位置输出响应曲线,图2(b)为位置输出误差曲线,图2 (c)为干扰观测器的输出曲线与实际干扰曲线。
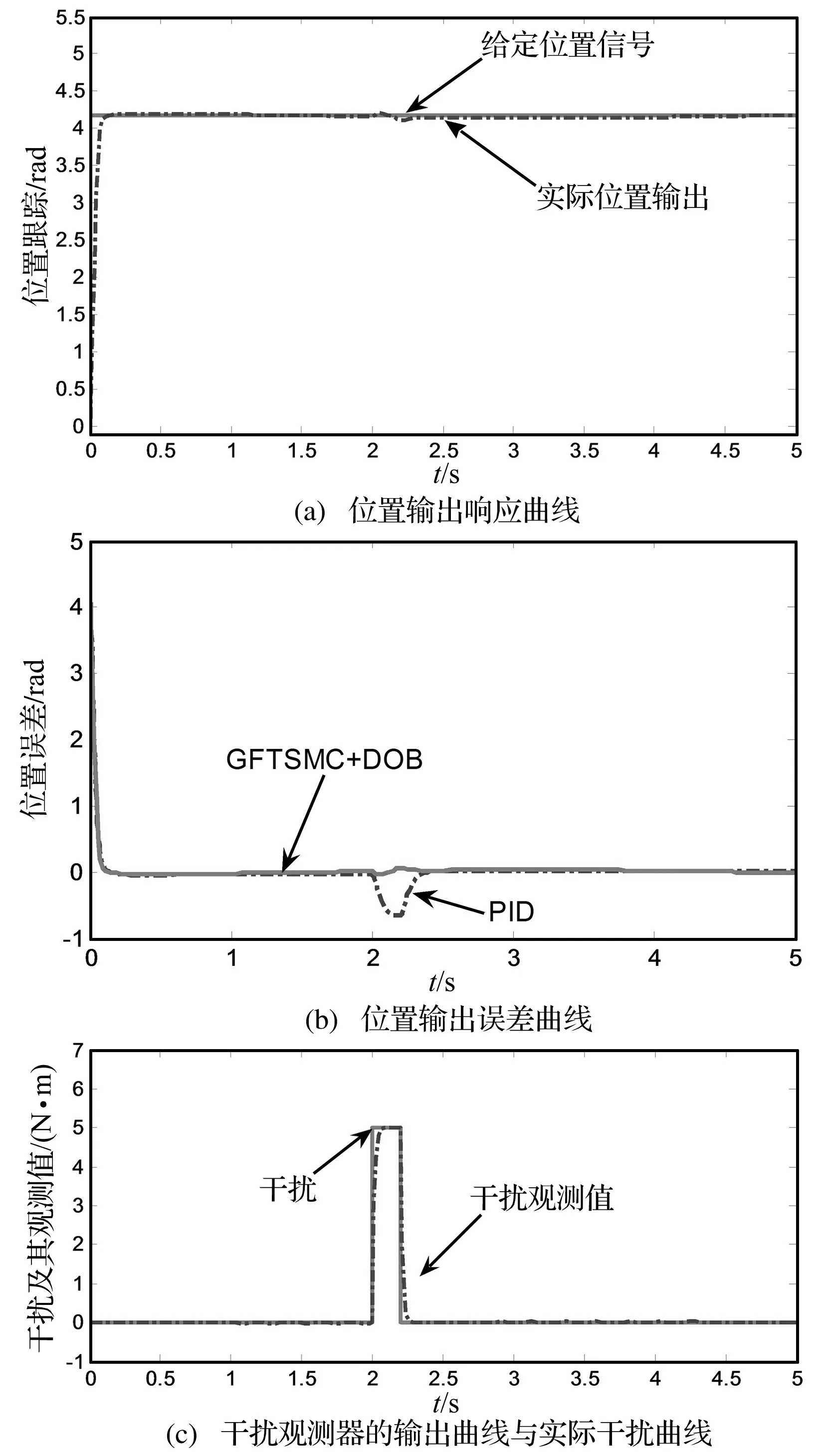
图2 阶跃响应仿真曲线组图
从仿真曲线图2(a)、图2(b)可以看出,采用GFTSMC+DOB控制,稳定的跟踪上输入所用的时间在0.3 s左右;达到稳定跟踪的状态以后,系统在2 s到2.2 s的干扰力矩下,输出角度误差最大为9 mrad,并能在60 ms左右时间内返回给定位置。从图2(c)可以看出,观测器对干扰的观测效果,在2 s开始与2.2 s结束处存在较大误差,总体观测效果良好,基本稳定跟踪上误差。
从图2(b)可以看出,采用PID控制,在无干扰下误差较小,但在2 s处的干扰下误差较大,达到0.6 rad,且调整时间较长。
4.2 正弦跟踪仿真
正弦输入设为:θ*=sint,单位,弧度,外部干扰设为:d(t)=0.5sin(2πt),仿真时间10 s。仿真试验设计为二种控制方法的对比,即常规PID控制方法和本文提出的控制方法,比较其位置跟踪性能及在持续干扰下的系统鲁棒性。
仿真图如图3所示,其中图3(a)为位置输出响应曲线,图3(b)为位置跟踪误差曲线,图3(c)为干扰观测器的输出曲线与实际干扰曲线。

图3 正弦输入下仿真曲线组图
从仿真图3(a)、图3(b)可以看出,采用GFTSMC+DOB控制,稳定的跟踪上输入所用的时间在0.2 s左右;达到稳定的状态以后,其动态跟踪误差为1 mrad,控制效果良好。从图3(c)看出,观测器对干扰的观测,基本能够稳定跟踪上干扰,观测误差较小,观测效果良好。
从图3(b)可以看出,采用PID控制,在正弦干扰仿真的整个过程中误差较大,存在8.5 mrad的位置跟踪误差,控制效果一般。
5 结束语
本文主要针对PMSM位置伺服系统中存在摩擦甚至机械传动间隙等问题,将GFTSMC技术应用于PMSM位置控制系统,提高了系统的快速响应、高精度跟踪等性能,并通过Lyapunov理论证明其稳定性;同时针对系统外部扰动问题,设计了指数收敛干扰观测器,提高系统的抗干扰能力。最后数字仿真结果表明,该算法能提高PMSM位置跟踪系统的性能,诸如快速响应、良好的鲁棒性和高精度跟踪,证明了该方法的有效性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
测控技术(2018年12期)2018-11-25 09:37:44
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
