
基于热熔胶固封的新型硬币包装机电设备设计系统研究
2018-07-30 09:05薛锐勇周鹏程冯武卫
机械工程师 2018年7期
薛锐勇, 周鹏程, 冯武卫
(浙江海洋大学 机械工程系,浙江 舟山 316000)
0 引言
硬币在世界范围内属于常用的流通货币,通常为圆形,使用金属制成,具有坚固耐磨、制作精美、规格整齐、便于识别等优点,广泛被用于公交和金融机构中[1-2]。但是硬币使用后,是需要分检包装的,如果仅仅依靠人工进行硬币的清点、包装,已经难以满足货币高速流通的现代社会[3]。
当今硬币清分包装机构多采用纸筒与布袋的包装方式。布袋的好处是容易打包、不受包装强度的影响,但是有着无法最大化利用包装的缺点[4]。纸筒包装的好处是包装速度快,缺点是包装材料再利用麻烦,环保性较差,包装强度有着不确定的因素。纸筒硬币包装机构较为简单,便于进行大规模包装作业,但是却存在设备成本高昂的缺点难以进行大规模的推广[5]。本文提出并设计了一种基于热熔胶固封的新型硬币包装设备,其具有方便、高效、操作简单、便于维护等优点。通过大量实验证明了设备具有可行性。
1 设备设计 硬币包装机设计
1.1 总体设计
本设备系统总体设计方案如图1所示,主要由硬币进币机构、硬币包装机构、硬币收集机构、电路模块构成,并采用单片机进行各个单元的控制。本设备系统采用了热熔胶对硬币外壁进行喷涂,为了保证打包效果,采用了多角度喷射的设计,能够有效固定硬币。在打包过程中需要实现计数打包功能,设计了一种计数控制系统,采用激光对射计数,并利用单片机编程控制,在整个过程中需要实现整体自动化控制。为了控制其自动进币机,对进币的模块采用了电动机振动将硬币抖动上料的方式。为了整个系统能够稳定实现,采用了反馈控制,提高了控制过程的精准性。
1.2 机械结构设计
根据总体设计方案要求,本设备系统机构部分应满足:1)应实现预设尺寸的要求;2)能够使实现对硬币的清点包装;3)应该满足一定的结构强度;4)保证单片机可以对整体进行有效的控制。所以将本设备分成硬币进币机构、硬币包装机构、硬币收集机构、电路模块这4个部分。硬币进币机构利用激光计数器进行硬币个数的记录,当硬币数量达到单片机预设数量时,再进入硬币包装机构;硬币包装机构主要利用热熔胶将整理好的硬币进行固封;硬币的收集机构通过推杆电动机将已经包装好的硬币堆推入硬币整理盒,电路模块通过传达单片机的命令使得整个设备可以正常工作。
1.3 硬币进币机构设计
因为在进币时多个硬币堆叠,容易造成计数器计数产生误差,也容易发生卡币现象,所以需要设计一种机构在硬币进币时就解决堆叠问题。本设备系统在设计时提出了2种解决堆叠问题的方案:
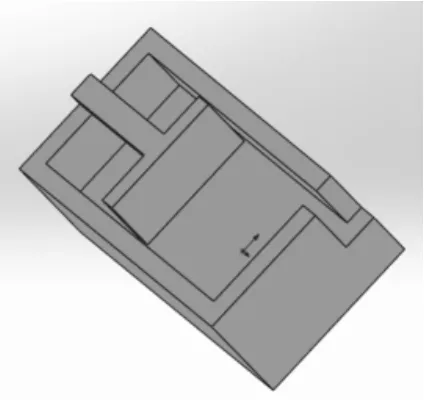
图2 推杆式防堆叠机构简图
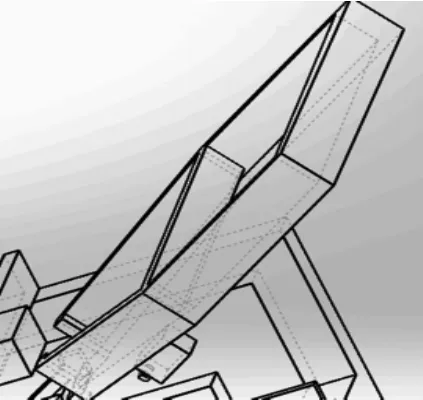
图3 振动电动机进币设计简图
方案一(见图2)采用了推杆式的设计来解决堆叠问题,该装置采用推杆,在推杆的头部安置一个离进币台高度大于1个硬币小于2个硬币厚度的推币板,推杆来回推动推币板来达成防堆叠效果。该方案的缺点是:第一,无法确定硬币进币时下落范围,从而使得防堆叠误差大;第二,进币台与之后装置之间连接处设计较为困难,无法全面考虑各种情况。
方案二(见图3)在进币台下方设计安装了一个微型振动电动机,在进币台中央安装一个离台底面高度大于1个硬币小于2个硬币的挡币板,进币台安装略倾斜,倾斜方向沿进币台出口方向向下,倾斜角度为硬币恰好处于最大静摩擦力的角度。该方案的原理是:在硬币处于最大静摩擦力的时候,给硬币施加轻微振动,硬币将自然沿倾斜方向下滑,在经过挡币板时,堆叠的硬币将被分开,从而达到防堆叠的效果。而且该方案会使硬币计数的效果显著地提高并降低误差。
经实验验证,方案二的可行性较高,效果较好,故采用方案二作为硬币防堆叠设计方案。
1.4 硬币包装机构设计
1.4.1 包装过程设计
封装的材料选择使用了热熔胶,它相比于传统的材料具有粘合度高冷却后硬度较强、密封性好、粘合工艺简单、回收再利用方便等优点。硬币包装过程的方案构思有2种,具体如下:
方案一(图4)采用了链传动带动多个载币台进行不停止运动的设计,硬币下落后,停留在载币台上,在链传动转动的过程中,通过固定安装在载币台两边的热熔胶枪将热熔胶喷涂在硬币壁面上,从而完成打包动作。在链传动转动过程中,会带动载币台转动,当载币台处于正下方时,硬币由于重力原因自然下落到硬币收集盒,从而完成整个包装过程。但是由于该方法存在硬币计数难、整个过程无法精确控制、硬币下落位置难以确定等因素,故而不采用本方案。
方案二(图5)采用推杆电动机作为硬币包装过程的主体,选择了激光对射传感器作为硬币计数器。推币机构(将硬币推至硬币收集盒)则设计了一个弹片装置。其具体运行原理如下:推杆电动机在最大行程的位置处,有呈正三角分布的3个热熔胶枪。硬币下落至推杆电动机上的载币台,当累计到预设个数时,系统打开推杆电动机开关,推杆向下运动,同时热熔胶枪开始喷胶包装硬币,当全部硬币喷涂完毕时,停止涂胶。在推杆电动机推杆行程偏下方有一个小弹片。当硬币随推杆下来时,弹片将包装好的硬币弹入硬币收集盒。之后,推杆上升回至初始位置。完成整个包装过程。
综合上述2种方案优缺点,本研究选择方案二作为硬币包装方案。
1.4.2 热熔胶枪自动进胶设计
如图6所示,本设备设计的热熔胶枪自动进胶选取了一个五相四线步进电动机作为动力来源,在电动机齿轮同一轴线上还有一个随动轴承。整个设计原理如下:随动轴承与电动机齿轮和胶棒之间形成过盈配合,电动机启动时,由于配合原因,会带动胶棒向前运动,因为有着随动轴承的存在,所以不会发生胶棒运动轨道偏离,或者胶棒受反作用力而远离运动轨道的情况。选取步进电动机的好处是可以精确地控制进胶量,减少材料的浪费,同时步进电动机的转矩很大,可以很好地带动胶棒完成进胶运动。
1.4 .3 硬币收集机构设计
如图7所示,通过在推杆电动机上加入一个简易随动(随推杆电动机)推杆,在推杆电动机行程末设计一个撞针,来共同构成本方案的简易推币装置。其运行原理如下:随动推杆随推杆电动机运动而运动,推杆在向下运动的时候,随动推杆碰到撞针的下端,撞针发生位置改变,撞针上端碰到硬币将硬币推下推杆电动机。推杆电动机向上运动的时候,随动推杆将撞针推回原位。
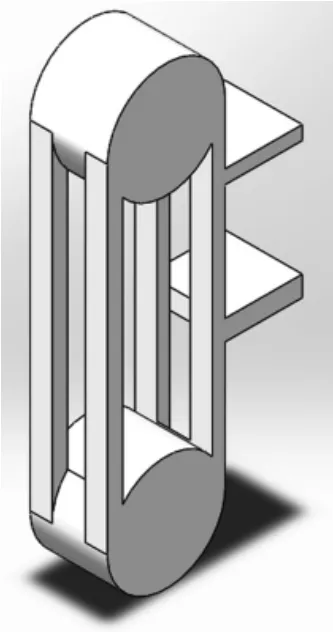
图4 链传动包装方案简图
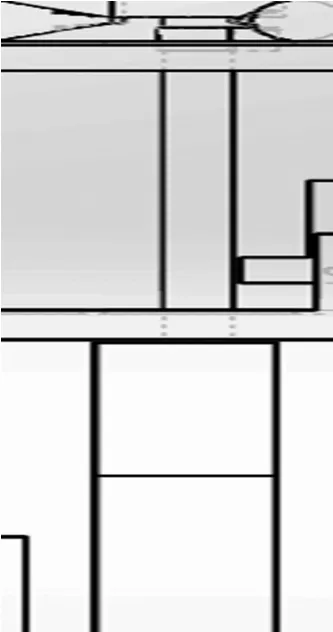
图5 推杆电动机包装方案简图

图6 进料机构简图
1.4.4 控制模块设计
控制模块采用单片机控制,电路编程语音采用C语言,本装置的控制程序,可以通过改变程序参数来改变步进电动机转速、单次包装数量,以及推杆电动机控制,从而实现高效的自动化效果。控制系统流程图如图8所示。
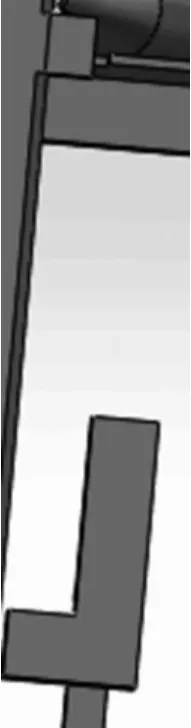
图7 硬币收集机构简图
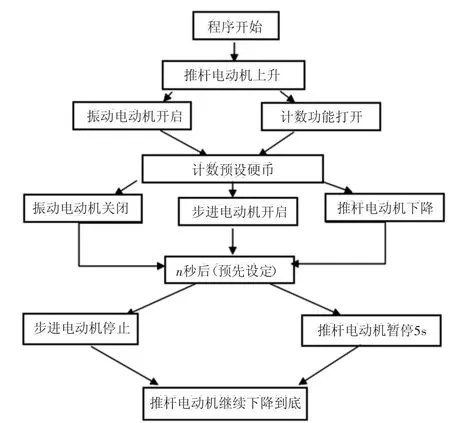
图8 控制系统流程图
步进电动机属于开环伺服系统的执行元件,通过电脉冲信号控制其中相绕组电流从而满足定角转动的一种机电元件,相比于其它的电动机便于开环精确控制并且无积累误差等。步进电动机控制的方法有很多,其控制功能强,灵活性好,单片机是常见的一种控制器,步进电动机既有传统的控制方式,也采用PLC进行控制,目前成为步进电动机的主要控制装置,而且步进电动机体积小、重量轻、成本低,从模拟控制转变为以单片机为核心的数字控制,是最新一代电动机的控制方式。步进电动机单片机系统设计必需满足以下功能:实现对步进电动机的转速、转向、转动角的有效控制。同时满足简单的操作界面。这就依靠于硬件部分和软件部分构成的步进电动机的控制系统必须与其他电动机控制系统一样的模块。硬件部分分为电源、单片机、显示器、驱动和输入设备等部分。软件部分则需要实现对输入部分,以及步进电动机转速、转向和转动角的控制。1)单片机在编写控制程序完成之后,通电单片机运行该程序,借助I/O输出口发送波形脉冲,从而控制步进电动机工作。在此过程中,控制系统界面上,步进电动机运动状态会显示出来。控制系统运行的一系列过程中完成了对步进电动机的实时操控,满足这样的条件需要单片机上装有接收模块,并根据步进电动机的运行状态整理参数。2)单片机的步进电动机控制系统编程之前要对单片机的每个接口进行定义,同时确定电动机驱动函数定义。再进行显示屏的编码定义,之后设置初始化函数预设定义。具体步骤:a.针对液晶显示器的左半屏的数据进行写入,然后再进行右半屏。b.编写主函数须先将已经确定的汉字编码地址发送到之后要显示的地址上,再将主函数进行循环。c.通过查询便可以确定步进电动机的运行速度。
2 整机模型及实验
工作原理如图9所示,硬币进入进币台后,振动电动机1开始工作,硬币将沿预设轨道下滑,在通过轨道2时,激光传感器3将开始计数。当计数40个时(可编程控制,此处以40为例),振动电动机关闭,3 s后推杆电动机5开始下降,同时包装装置4开始工作,将硬币包装。在下落到推币机构6上方时,推杆电动机将暂停工作7 s,等待包装材料冷却,之后推杆电动机继续下落,推币机构6将会把包装好的硬币推入硬币收集装置。
本系统首先利用SolidWorks建立3D模型图,如图10所示,采用五相四线步进电动机、11 mm胶棒、激光计数器、单片机、振动电动机、运动电动机、推杆电动机、欧标2020铝型材、2020角铝,以及3/5 mm亚克力板部分3D打印零件制作实物模型,实物图见图11。
通过多次实验和参数优化设计,本文设计的硬币包装设备实现了高效包装过程,针对不同硬币大小及数量,可以事先在控制系统中进行参数设计,以期达到柔性、可变的要求,拓展了本系统应用的范围。
3 结语
本文通过对硬币包装机构的分析和研究,自主设计了一种基于热熔胶固封的新型硬币包装系统,并进行了实物设计及实验验证。实验结果证明,该包装系统具有成本低、功能丰富、操作方便以及与周围环境相协调的优点。本设备可应用于公交公司、银行、商场等有着大量硬币流通的场合,目前该类企业硬币清点包装工作大多采用人工方式,耗时,耗力,所以本系统的开发和研究对提高硬币包装的效率有很大意义,应用前景非常广阔。
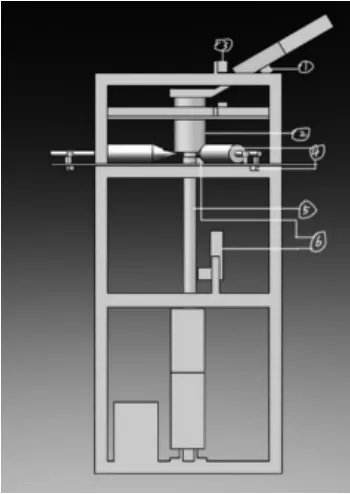
图9 工作原理
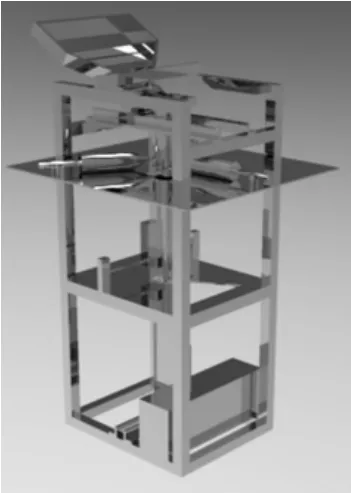
图10 设备3D模型图

图11 硬币包装系统实物图
猜你喜欢
学苑创造·A版(2022年5期)2022-05-19
合成材料老化与应用(2021年1期)2021-03-03
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
中小企业管理与科技(2018年34期)2018-02-07
中国核电(2017年1期)2017-05-17
化工管理(2017年8期)2017-04-26
幼儿画刊(2016年11期)2016-12-21
生殖医学杂志(2013年3期)2013-03-11
制造业自动化(2011年10期)2011-01-19
