电力推进船舶有源滤波器的电压环设计
2018-07-26 09:39:04
武汉船舶职业技术学院学报 2018年2期
(南通航运职业技术学院,江苏南通 226010)
相比于普通船舶的推进系统,电力推进船舶具有效率高、机动性能好、噪音低、污染小等优点,因电力推进系统需要采用大量变频装置,其包含二极管、晶闸管等电力电子器件[1],大量电力电子器件是电力推进船舶电网谐波的主要来源。船用电力系统对于谐波比较敏感,电力系统中高次谐波的产生会对计算机系统或者通信系统形成干扰,对船舶的正常运行造成影响[2],因此谐波抑制对于优化电网环境起到了至关重要的作用。
目前在船舶电网谐波抑制方面,因谐波治理需求迫切,且随着有源电力滤波器的不断发展,根据现场应用的不断改进,有源电力滤波器种类逐渐增多[3]。为了保证有源电力滤波器的良好运行,直流侧电压需要基本稳定在一个值,但是由于开关器件频繁的开断会产生能量损耗,所以需要对直流侧电压进行干预控制。直流侧电压稳定是谐波补偿的基础,由于能量损耗,使得电容电压不稳定,针对这一问题对直流侧电压进行了PI控制器设计,有效解决了直流侧电压不稳定问题。
1 电压环控制原理
直流母线电容为并联有源电力滤波器的工作提供直流电压,理想情况下直流侧电压会自动保持稳定,但由于变流器存在开关损耗等原因,并受网侧和负载侧能量流动的影响,变流器直流侧电压往往会出现较大波动[2],若不加以控制将影响到补偿装置的正常工作。因此,在变流器工作时,必须将直流侧电容电压控制在一个稳定值上,以保证APF装置良好的补偿性能。
对APF直流侧电压控制,可以采用独立电源方式,由二极管整流电路给变流器直流母线电容供电,这种方式虽然能达到电容电压控制的目的,但需增加一套设备,系统也将更加复杂,同时增加系统的成本和功耗。因此,实际应用中通常采用另一种更为简单的方式,即通过对APF主电路进行适当控制,根据能量守恒原理,在指令电流中叠加一定的有功电流分量,使变流器交直流侧之间进行能量交换,从而实现直流侧电压的稳压控制。
对于三相三线制系统,三相瞬时无功功率之和为零,APF交直流侧的能量交换取决于瞬时有功功率,瞬时有功功率的变化将直接影响直流侧电压波动[2]。可对瞬时有功电流进行补偿以达到系统有功功率平衡的目的,从而稳定APF直流侧电压,加入直流侧电压控制的FBD谐波检测原理如图1所示。

图1 加入直流侧电压控制的检测原理图
PI控制器根据直流侧电容电压实际值与参考值之间的差值,从电网侧吸收或者发出有功的电流值,来平衡直流侧电容的电压值。PI控制器的设计对于电力推进船舶有两个优点:
(1)当电力推进船舶加入大负载时或者参考电压突变时,直流侧电压能够适时的改变;
(2)对直流侧的稳压控制有良好的鲁棒性[2]。
2 电压环控制设计
2.1 基于PI调节器的电压环控制设计


图2 直流侧电压控制原理结构图
根据图2,由有功电导直流分量与参考电压信号得到基波正序有功分量,叠加Δip后附加的三相基波正序有功电流为:
(1)
电网相电压有效值为E,则叠加的补偿量产生的附加有功功率为:
(2)
假设ΔP经时间Δt,并造成直流侧电压大小变化ΔUdc,则有:
(3)

(4)
当Δt→0时,认为直流侧电压稳定,则有:
(5)
对式(5)进行拉氏变换得到:
(6)
即是说被控对象传递函数为:
(7)
为取得理想补偿效果,需要采取合适的控制手段稳定直流母线电压。由于直流侧电压给定为直流量,可采用传统的PI控制策略,采用PI调节器的直流侧电压控制框图如图3所示[5]。
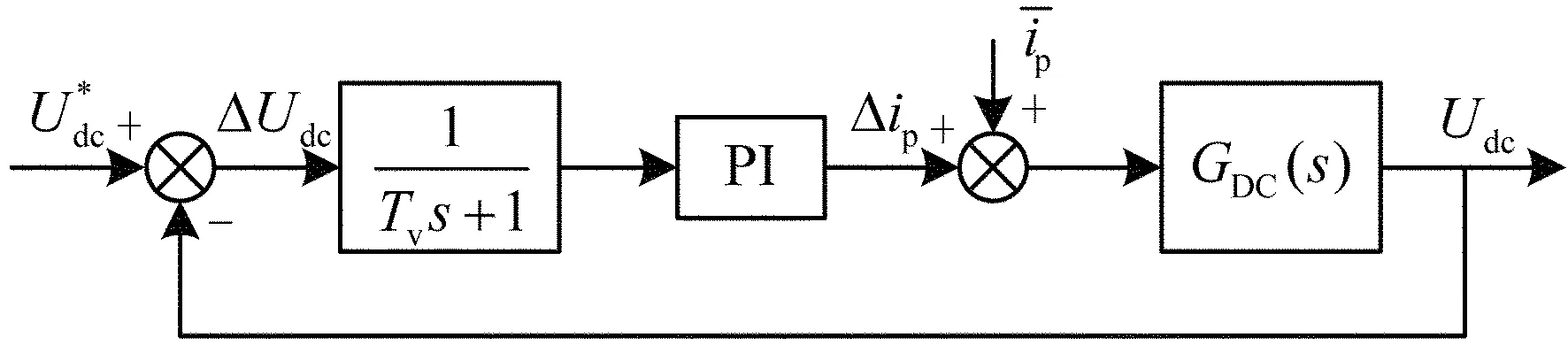
图3 采用PI调节器的直流侧电压控制框图
设PI调节器的传递函数为:
(8)
式中,KvP为比例系数,KvI为积分系数。则系统的开环传递函数为:
(9)
式(9)是一个典型II型系统,中频环宽为:
hv=τv/Tv
(10)
由典型II型系统控制器参数整定关系得到[6]:
(11)
考虑到对电压环控制系统抗扰性以及跟随性的要求,一般取中频环宽hv=5,代入上式计算得到PI调节器的参数为:
(12)
将本文参数代入公式(12),可得到电压环PI调节器参数为:比例系数KvP=0.28,积分系数KvI=2.81。
2.2 设计验证
根据所设计的PI控制器及其相应参数,电压控制系统得到的阶跃响应曲线如图4所示,由曲线可以看出,设计的控制系统虽然存在一定超调,但其动态响应速度较快,基本可以实现系统的稳定。
图5为电压控制系统的波特图,从图中可以看出,其幅值裕度约为41.1,而相角裕度近似无穷大,理论上可以满足二阶控制系统对于稳定性的基本要求,由此验证了本文所设计的APF电压控制系统的正确性。
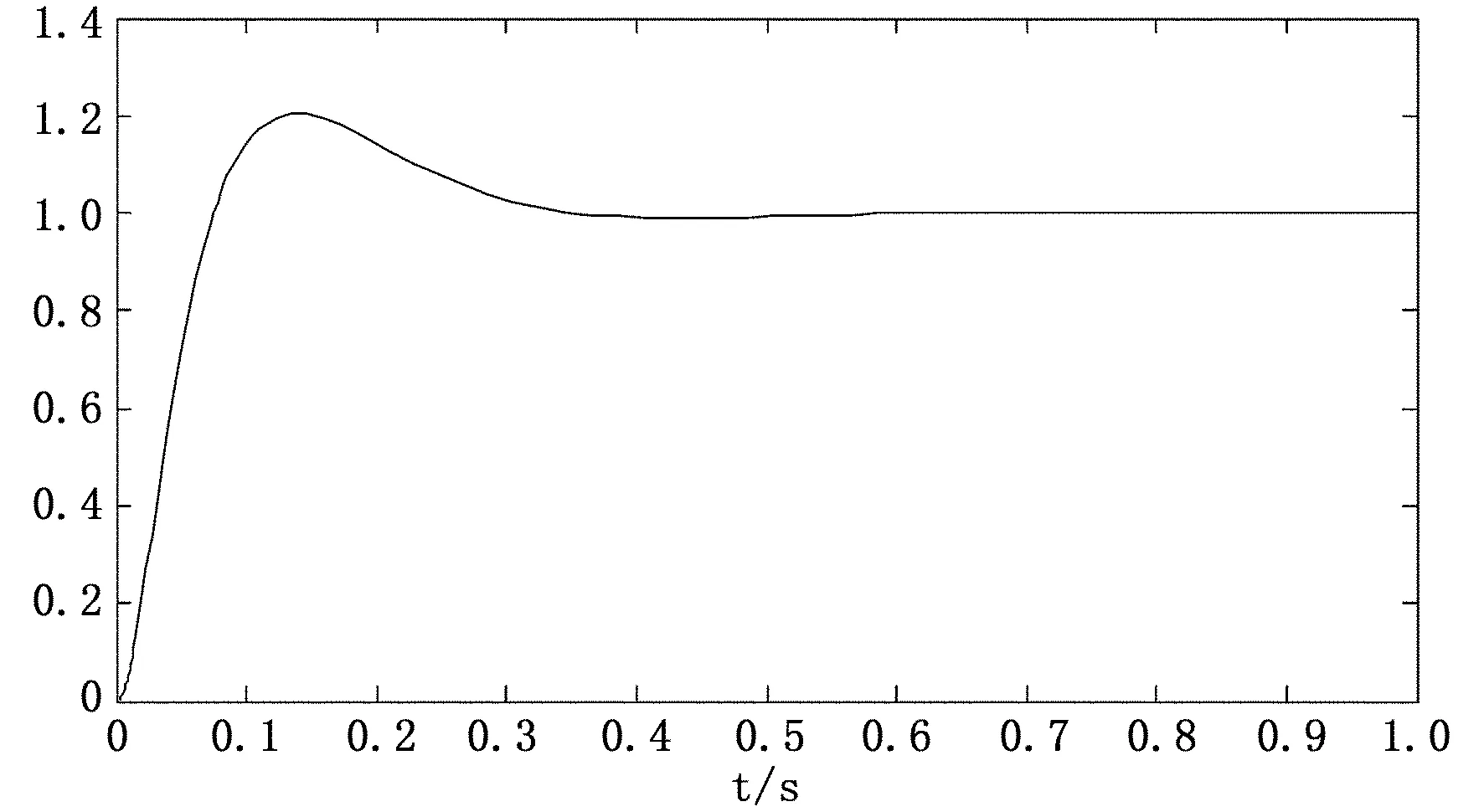
图4 电压控制系统阶跃响应曲线
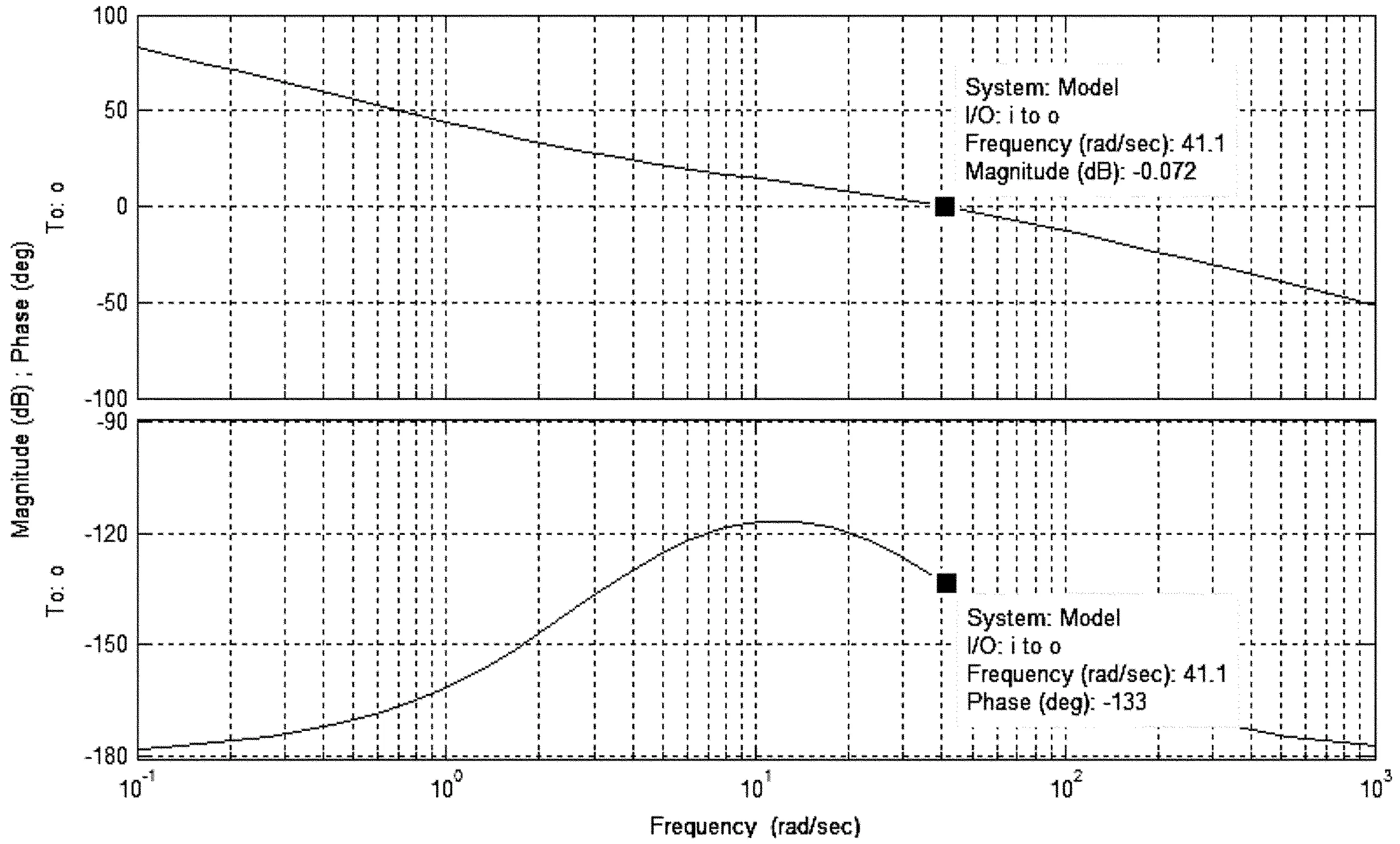
图5 电压控制系统波特图
3 仿真分析
3.1 仿真参数设定
为了验证电压环PI控制方式的有效性,基于Matlab/Simulink环境搭建仿真模型进行了对比的模拟分析。其主要的仿真参数为:网侧电压额定值660 V;所采用的模拟电力推进船舶谐波源为非线性阻感负载,其前端为二极管整流单元;变流器的电容为4 500 μF,其给定电压值为2 000 V;交流侧电感值为4 mH;为了能观察所研究的控制系统在跳变负载下的响应速度,设置于负载等值的跳变电阻。仿真中,设置计算机的结算步长为100 kHz,开关频率为10 kHz。
3.2 基于PI调节器的电压环控制仿真
为了验证直流侧电流PI控制方法的有效性,基于MATLAB/Simulink环境搭建了仿真模型进行模拟分析。在仿真中,电流跟踪控制器为基于重复控制的改进无差拍控制器,图6为直流侧电压实际值的检测环节,通过对APF变流器直流侧的电容电压值进行采样测量,可以得到当前时刻的直流侧电压值。
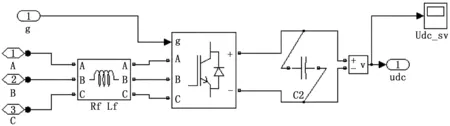
图6 直流侧实际电容电压值的检测环节
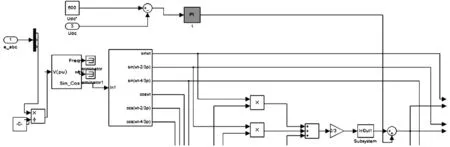
图7 APF直流侧电压控制原理图
图7为APF直流侧电压控制的原理图,可以看出经过采样得到的直流侧实际电容电压值与给定电压值(2 000 V)进行比较,能够得到期望与给定值之间的偏差,由本文所研究的PI控制器进行跟踪控制以后送至检测环节的有功通道,便可得到直流侧有功功率的需求控制值,最终得以实现APF直流侧电压的稳定。
图8为APF变流器直流侧电压不加控制时的电压波形图,根据波形可以看出,直流侧电压值一直处于上升的趋势中,这将给电容器和APF的稳定性带来不利影响。

图8 电容电压不加控制的波形图
图9为APF变流器直流侧电压加PI控制时的电压波形图,根据波形可以看出,直流侧电压得到了较好控制,不但前期电容电压能够快速响应,同时在负载跳变点处,电压也能够维持在稳定水平。根据波形可知,采用所研究的PI控制器进行控制以后,直流侧电压得到了较好的动态平衡控制,能够为APF正常且高效工作提供了较为有力的支撑。
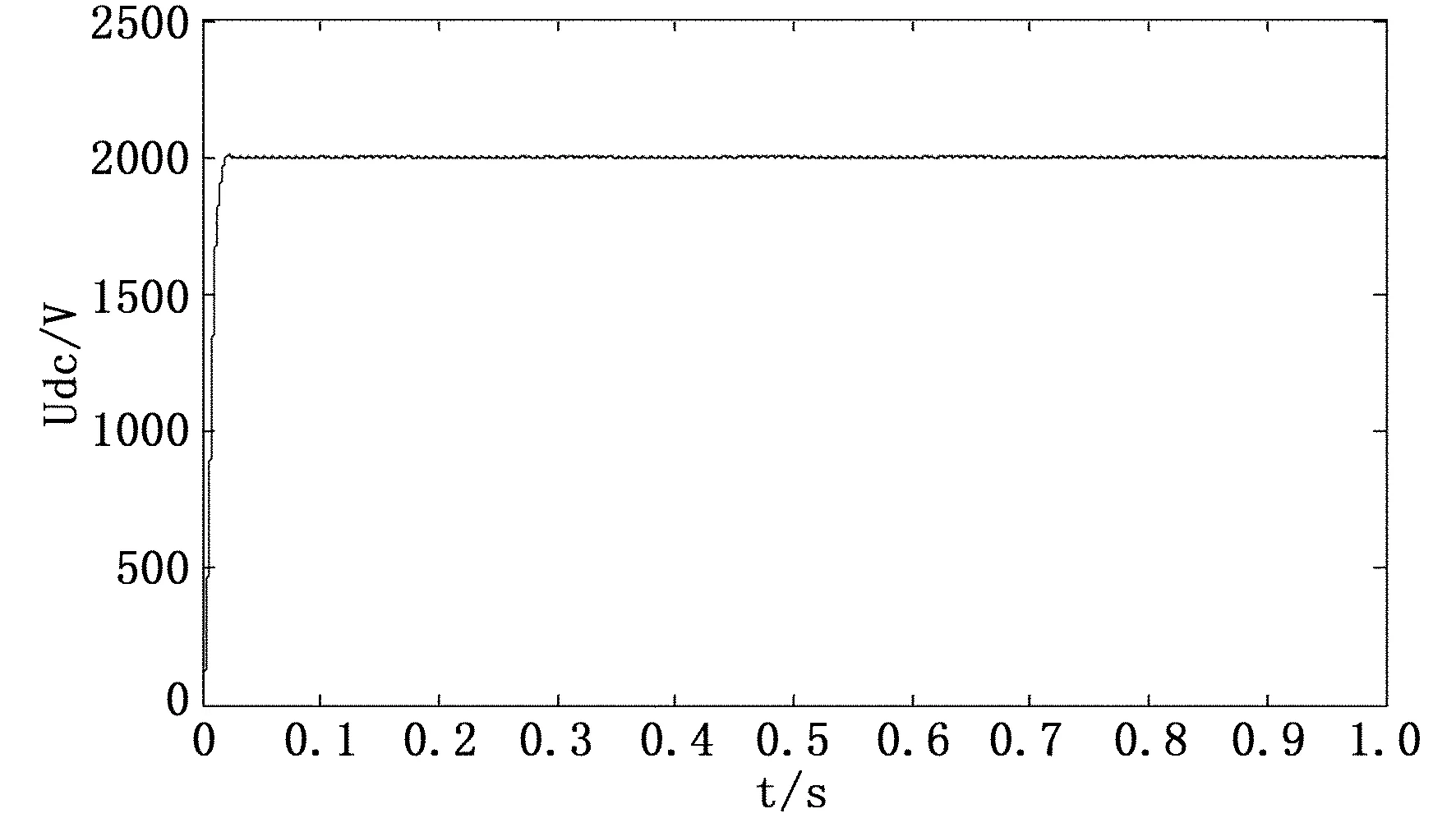
图9 电容电压PI控制的波形图
4 结 语
本文介绍了电压环控制的原理,并针对电力推进船舶有源电力滤波器的电压环进行了设计研究。为了保证直流侧电压的稳定以及系统的安全运行,采用了基于PI调节器直流侧电压控制,研究了PI调节器直流侧电压控制的结构以及数学模型,验证了电压控制系统的稳定性,通过PI调节器对直流侧电压进行了有效控制。
从仿真结果中可以看出,在没有加入PI调节器时,直流侧储能电容的电压波形发散。而加入PI调节器对并联有源电力滤波器的电压环控制后,直流侧电压稳定在2 000 V,储能电容的电压波形在一个周波内便能实现稳定,且其波动范围较小,Matlab仿真结果验证了所设计的PI控制器动态性能与控制精度的合理性。
猜你喜欢
测控技术(2018年2期)2018-12-09 09:00:56
电测与仪表(2016年8期)2016-04-15 00:30:16
电测与仪表(2016年6期)2016-04-11 12:07:58
通信电源技术(2016年4期)2016-04-04 02:57:12
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
电机与控制应用(2015年7期)2015-03-01 03:50:12
电测与仪表(2014年19期)2014-04-04 12:06:22