利用多普勒效应的ADS-B欺骗式干扰检测方法
2018-07-25 09:50吴仁彪
信号处理 2018年6期
陈 蕾 吴仁彪 卢 丹
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
1 引言
广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,简称ADS-B)技术是一种新的监视技术,通过结合全球卫星定位系统实现精确的定位,将其位置、速度、飞机身份与类型及飞行状态等各种信息经过扩展断续震荡编码,形成扩展断续震荡信号,经调制通过射频数据链连续广播其自身飞行状态及位置速度等相关信息,以实现更加可靠的监视。但是ADS-B信号格式公开,并且信道不加密,这使得系统的安全性面临极大风险,非常容易受到欺骗干扰的影响。目前国内外已有很多实验成功对ADS-B系统实施了欺骗[1-2],随着ADS-B的进一步推广应用,ADS-B 的欺骗干扰自然成为威胁空中交通安全的一个亟待解决的问题。
针对此问题,国内外已经开展了很多研究,具体的解决方案可以归纳为三大类:第一类,基于密码学的方法[3- 6],此类方法均需要改变现行的ADS-B协议,与现有的ADS-B系统不能兼容,导致附加成本非常高,难于实施;第二类,基于多数据源的方法,文献[7- 8]通过传统监视技术中的雷达作为辅助源,协助ADS-B系统进行监视,但这种方法需要多个数据源之间进行数据融合,复杂度高且在很大程度上依赖于传统的监视技术;文献[9-11]通过多个基站进行多点定位对目标的真实位置进行验证,文献[12]利用接收信号强度对航迹进行验证,检测效果较差;文献[13]利用信号时间间隔验证航迹的运动,文献[14-15]利用多普勒效应来检测干扰,但需要多个基站协同工作以消除发射机自身的不确定性频率偏移,这些方法中,基站之间的相对位置对算法影响都很大,且都需要多个地面站之间的同步,复杂度很高;第三类,基于单一数据源的方法[17-19],此类方法目前都是通过阵列天线对目标信号的来向进行验证,此类方法复杂度有所降低,但阵列天线本身结构也较为复杂,且难于校准,另外此类方法需要空间搜索测向,计算复杂度高,虽然文献[20-21]提出了一种不需要空间搜索测向的方法,但是该方法需要已知阵列流形信息,并且对阵列误差较为敏感,需要阵列校准。
基于此,本文提出了一种基于多普勒频率的欺骗式干扰检测方法,此方法仅需要单一数据源且不需要阵列天线,复杂度大大降低,方法通过验证真实信号的多普勒频移变化与报告的位置计算的多普勒频移变化是否一致来检测欺骗式干扰,通过求相关的方法消除了不同发射机中心频偏不相同的问题。相比于已有的方法,此方法避免使用多个接收机甚至多个数据源协同工作,且与现有ADS-B系统兼容,因而实用性较强。
2 信号模型和问题陈述
2.1 信号模型
1090ES数据链是ADS-B 系统中应用的最为广泛的数据链,其以1090 MHz作为载频,采用ASK(Amplitude Shift Keying)调制,通过不同种类的数据帧广播包括空中位置消息、空中速度消息、地面位置消息、飞机身份与类型消息、事件驱动消息等多种类别的消息,不同类别的帧格式基本相同,如图1所示,每帧时长120 μs,包括固定8 μs的前导脉冲和112 μs的数据域,数据域采用PPM(Pulse Position Modulation)调制,数据速率为1 MHz。在112 bit的数据域中,不同种类的数据帧的ME(Message Field)字段包含着相应类别的相关数据信息。
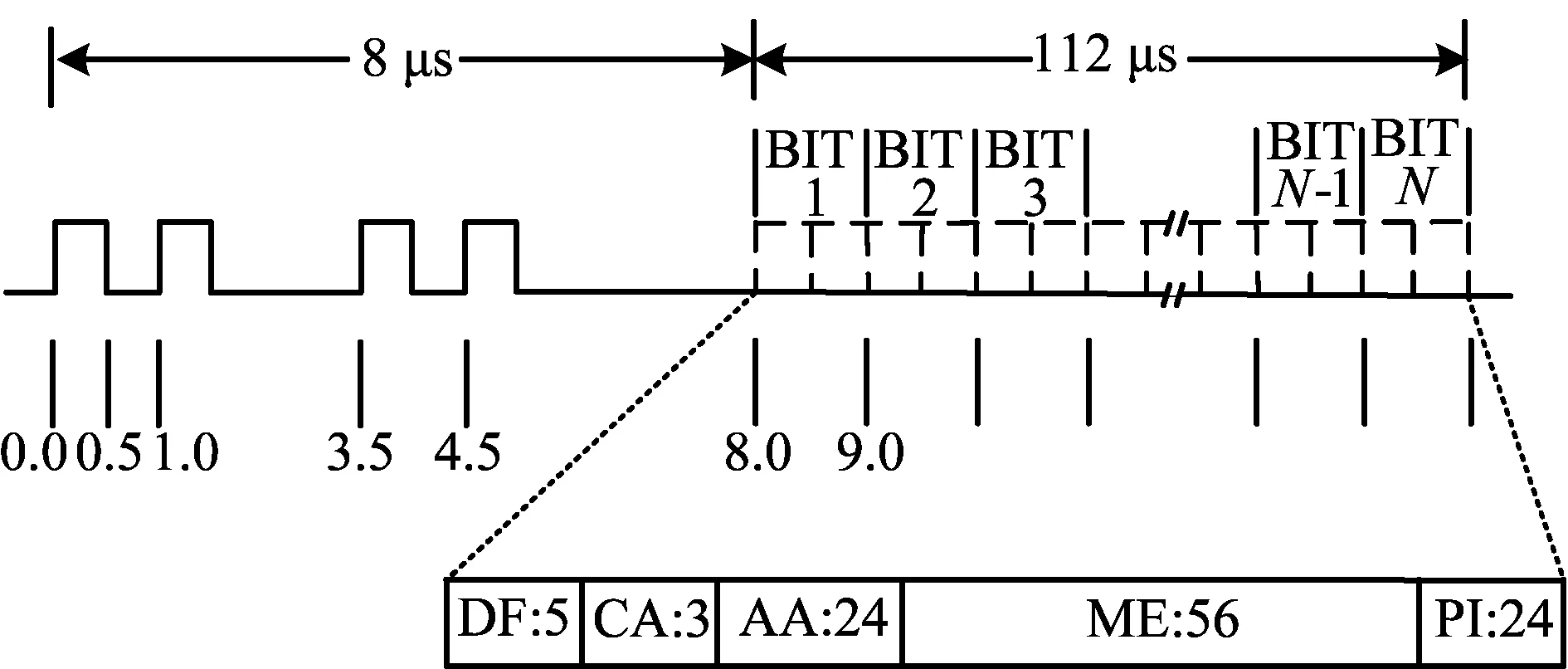
图1 ADS-B帧格式Fig.1 ADS-B frame structure
根据国际民航组织(ICAO)制定的ADS-B标准[22],飞机上安装的ADS-B发射机的射频中心频率在1090 MHz±1 MHz,即飞机的ADS-B发射机中心频率并不是稳定在1090 MHz的中心频率上,发射机的中心频偏为ΔfT。那么接收信号的载波频率可以表示为:
fc0=f0+fd+ΔfT
(1)
其中,f0表示载波的中心频率,这里表示中频信号的载波频率(本文为10 MHz),fd表示相应与接收信号的多普勒频移。那么时刻t接收到的一帧消息可以表示为:
(2)
上式中,A表示接收到的信号的功率,D(t)表示基带信号,φ和fc0分别表示初始相位和中频载波频率。e(t)表示复高斯白噪声。
2.2 问题陈述
我们考虑一个真实飞机和欺骗源同时存在场景,假设真实飞机‘AA’通过其机载ADS-B发射机正常发送其速度和位置等消息,可得到一系列航迹点。欺骗干扰机在接收机附近可以保证其干扰信号都能被接收机正常接收到的位置,通过伪造正确格式和编码内容的位置、速度等一系列ADS-B消息,使接收机解码出虚假飞机目标‘BB’相应的ADS-B报文,并进一步显示在管制员屏幕上,扰乱空中交通秩序。当然,为了某种目的,干扰机可能不会一直位于同一位置,而是频繁的改变其位置,甚至可能在运动的同时实施干扰。因此,本文考虑两种欺骗场景:
1)欺骗干扰机在接收机附近某一固定位置实施干扰;
2)欺骗干扰机在接收机附近运动并实施干扰。
3 欺骗干扰检测方法
3.1 报文多普勒频移计算方法
在ADS-B空中速度消息中,包含速度的东西方向分量、南北方向分量和垂直分量,即其速度矢量可以表达在以飞机为坐标原点的东北天坐标系内,而ADS-B的空中位置消息中,位置信息通过大地坐标系中的经度(λ)、纬度(φ)和高度(h)进行描述,因而计算多普勒频率时,需要通过将大地坐标系转化为以飞机为坐标原点的东北天坐标系,将位于大地坐标系中的由接收机到飞机的指向向量转化到以飞机为坐标原点的东北天坐标系中,进而计算多普勒频率。
将大地坐标系转换到以飞机为坐标原点的东北天坐标系需要借助地心地固坐标系,假设ADS-B接收机在大地坐标系中的坐标为(λR,φR,hR),飞机的空中位置坐标为(λT,φT,hT),那么二者在地心地固坐标系中可以分别表示为
(3)
(4)

那么进一步可得,在地心地固直角坐标系中,由飞机到接收机的方向向量为
(5)
利用坐标变换矩阵S将观测向量转换到东北天坐标系中,即
penu=S·pecef
(6)
其中坐标变换矩阵S为
(7)
另外,可从ADS-B的空中速度消息中解码得出以飞机为坐标原点的东北天坐标系中的速度矢量venu,进一步可计算出接收机接收到ADS-B信号的多普勒频率:
(8)
其中,λ=c/fc表示载波波长,载波频率fc≈1090 MHz,c为电磁波传播速度。
3.2 检测算法
根据标准文件[22],ADS-B消息的发射频率约为每秒6.2条,其中空中位置消息、空中速度消息、事件驱动消息均为每秒2条,身份消息为每秒0.2条。假设飞机从位置A到达位置B,历时n秒,共发送空中位置消息2n条,空中速度消息2n条,事件驱动消息2n条,记为
X={X1,X2,...,Xn}
(9)
其中,Xi表示第i秒发送的消息的集合,具体包括
Xi={sνi1,sνi2,spi1,spi2,sei1,sei2}
(10)
已知接收机本身的三维位置PR(λR,φR,hR),可根据3.1所述方法计算第i秒报文对应的多普勒频移fdi。
另一方面,利用FFT算法可对Xi中的消息分别进行频率估计,可得到一组真实信号的频率估计值:
(11)


(12)
那么,对于式(9)所给出的所有信号组,可由式(8)和式(12)分别计算出一组报文对应的多普勒频率和一组信号估计频率:
fd={fd1,fd2,...,fdn}
(13)
(14)
对于真实目标,有
(15)


(16)

ρ≥ε
(17)
则判定为真实目标,否则判定为欺骗式干扰目标。
4 仿真实验
假设接收机位置为东经117.3621,北纬39.1089,高度为20 ft,在接收机附近水平范围40 km内随机生成500条航迹,高度为30000~34000 ft,位置关系及航迹示意如图2(a)所示,航迹时间长度为27.5 s,共发送55条ADS-B空中位置消息,所有飞机都假设在巡航状态,速度800 km/h左右。欺骗源位于地面,假设欺骗源静止不动,欺骗目标与真实目标的发射机频偏均在(-10 kHz,10 kHz)范围内随机分布,结果如图2(b)所示,真实目标的相关值集中在1附近,而欺骗干扰目标的相关结果集中在0附近,当检测门限ε∈(0.4,0.6)时,能够完全区分欺骗干扰目标和真实目标。
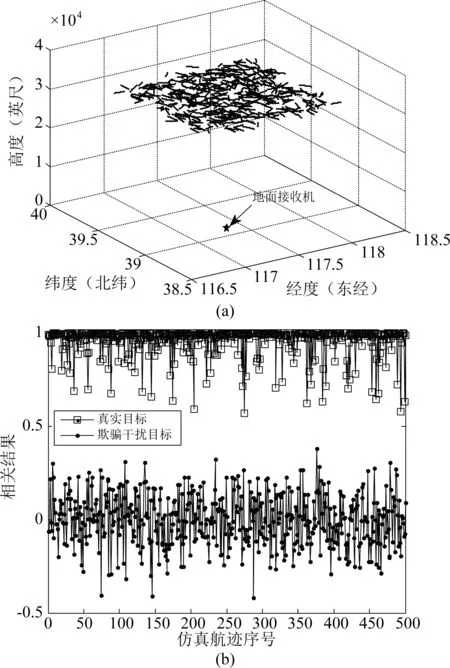
图2 静止欺骗源仿真实验结果Fig.2 Static deceptive source simulation results
进一步,我们假设欺骗源在接收机附近运动,考虑实际情况,我们令接收机位置不变仍为东经117.3621,北纬39.1089,高度为20 ft。在接收机附近5 km范围内匀速运动,时长仍为27.5 s,欺骗源发出欺骗干扰消息的时间间隔与真实ADS-B发射机一致,欺骗源的高度5 ft,接收机位置、欺骗源运动轨迹的经纬度相对位置关系如图3(a)所示,欺骗目标与真实目标的发射机频偏均在(-10 kHz,10 kHz)范围内随机分布。实验结果如图3(b)所示,真实目标的相关值仍集中在1附近,虚假目标的相关结果也在0附近,仍能够较好的区分真实目标和虚假目标。
考虑到信噪比对频率估计有一定的影响,下面选取了真实航迹和欺骗航迹各500条在不同信噪比条件下进行实验,设定判决门限为0.4,当所用ADS-B消息的帧数量不同时,得到如图4所示的结果,图4(a)为不同信号条数对应的误检测概率随信噪比变化图,图4(b)表示不同信号条数下对应的漏检测概率随信噪比变化。可见,选用的ADS-B帧数量越多,真实目标与欺骗干扰目标的区分度越高,检测效果越好。
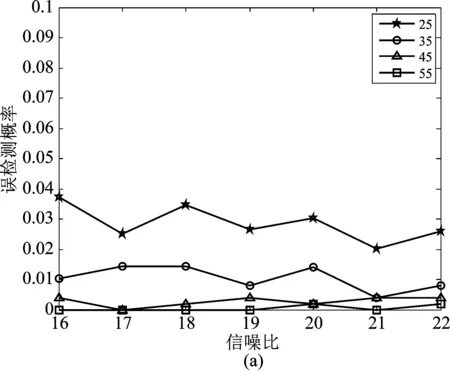
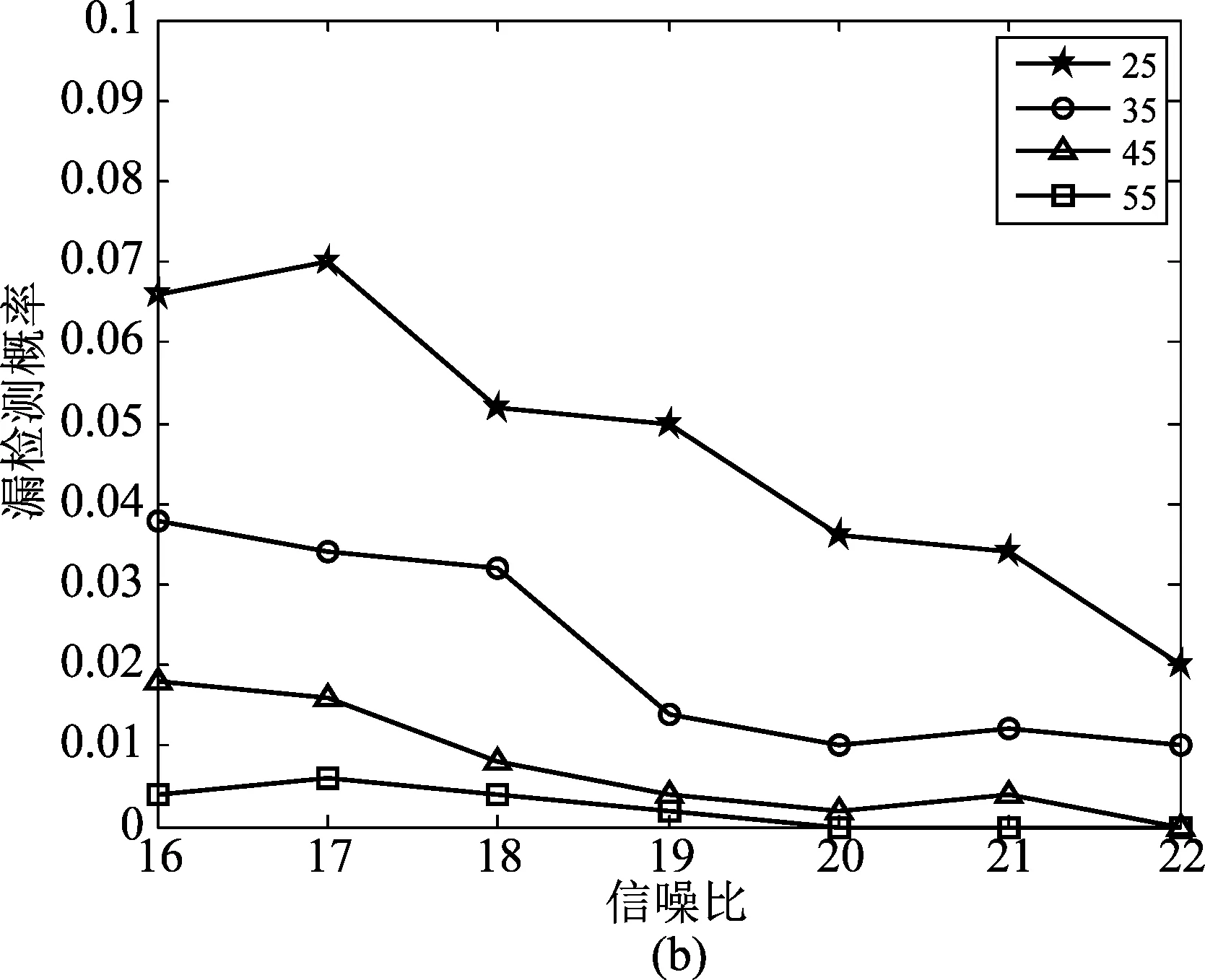
图4 不同帧个数下检测结果随信噪比变化关系曲线Fig.4 The curve of detection results changing with SNR using different frame number
考虑到多普勒频率的变化率与接收机和航迹的相对位置有关,下面利用不同位置处的接收机进行实验,这里分别选取了位于航迹分布范围的中心点正下方(117.362, 39.1089, 20)和距离航迹分布中心点正下方60 km(116.921, 39.521, 20)、100 km(116.572, 39.748, 20)和150 km(40.109, 116.262, 20)的四个接收机进行实验,得出不同距离对应的检测结果随信噪比变化情况,结果如图5所示,图5(a)(b)分别为设定检测门限为0.4时的误检测概率和漏检测概率。由图可以看出航迹与接收机的平面距离对真实目标的判定结果基本无影响,而对于虚假目标,欺骗的航迹与接收机距离越近,多普勒频率的变化也就越明显,检测效果越好。
考虑此外,本文将所提方法与文献[15]中M.Schäfer所提方法进行粗略比较,M.S所提方法利用两个以上的接收机,和一组速度、位置消息进行干扰检测,其思想是利用不同接收机接收频率的差值来消除发射机频率偏移的影响,验证目标相对于不同接收机的多普勒频率差值是否与其估计的频率差值相等。图6所示为M.S方法与本文所提方法的检测效果对比,实验中两个接收机的位置分别为(117.37, 39.42, 30)和(117.36, 38.77, 30),航迹与前述实验中相同,欺骗源静止,M.S方法所用时长为1 s,本方法所用时长为25 s,M.S 方法所用接收机为2个,本方法所用接收机为1个。可见,本方法在利用单个接收机的情况下通过增加判断时长达到了比M.S方法更好的检测效果。
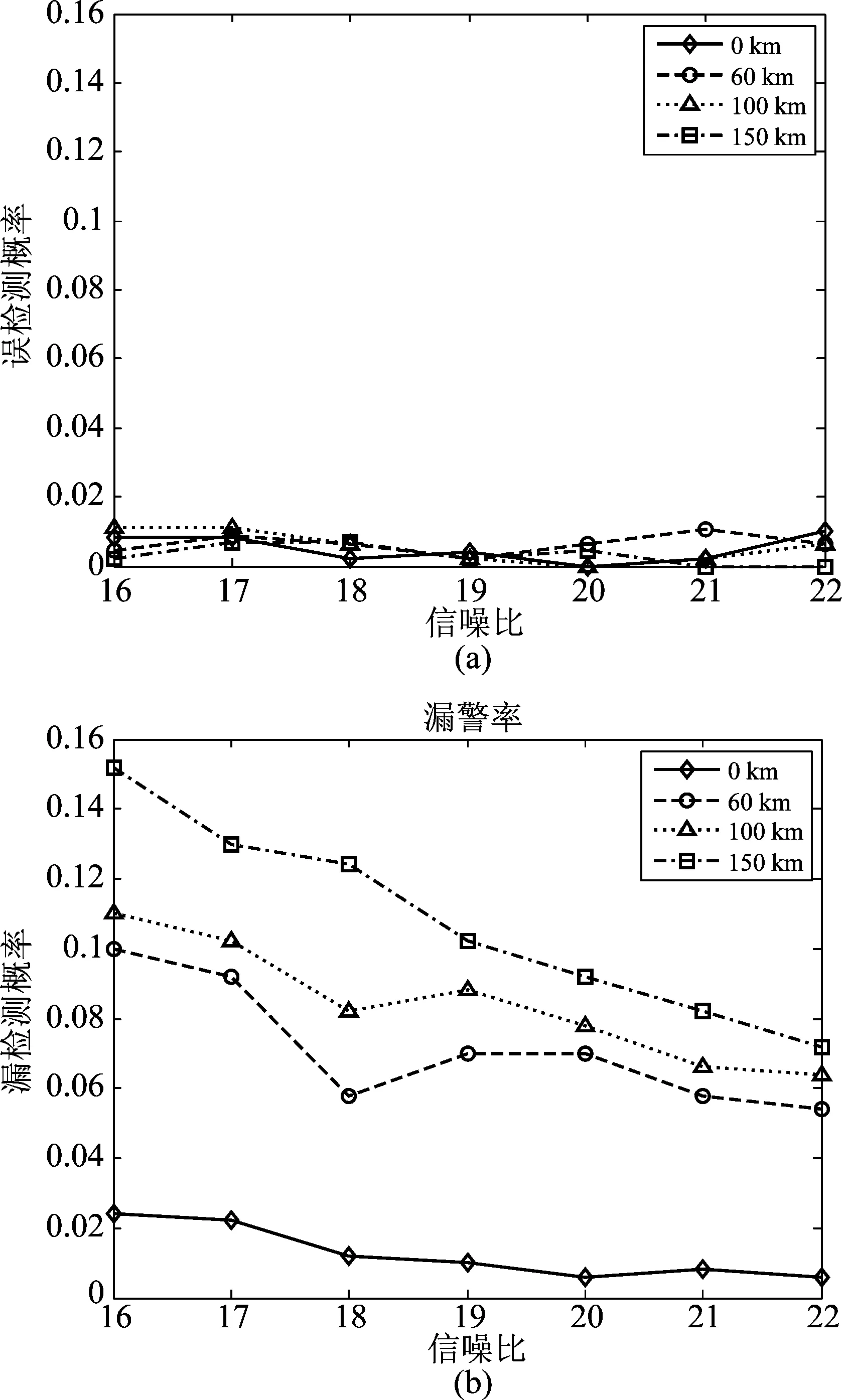
图5 不同距离下检测结果随信噪比变化关系曲线Fig.5 The curve of detection results changing with SNR in different distance
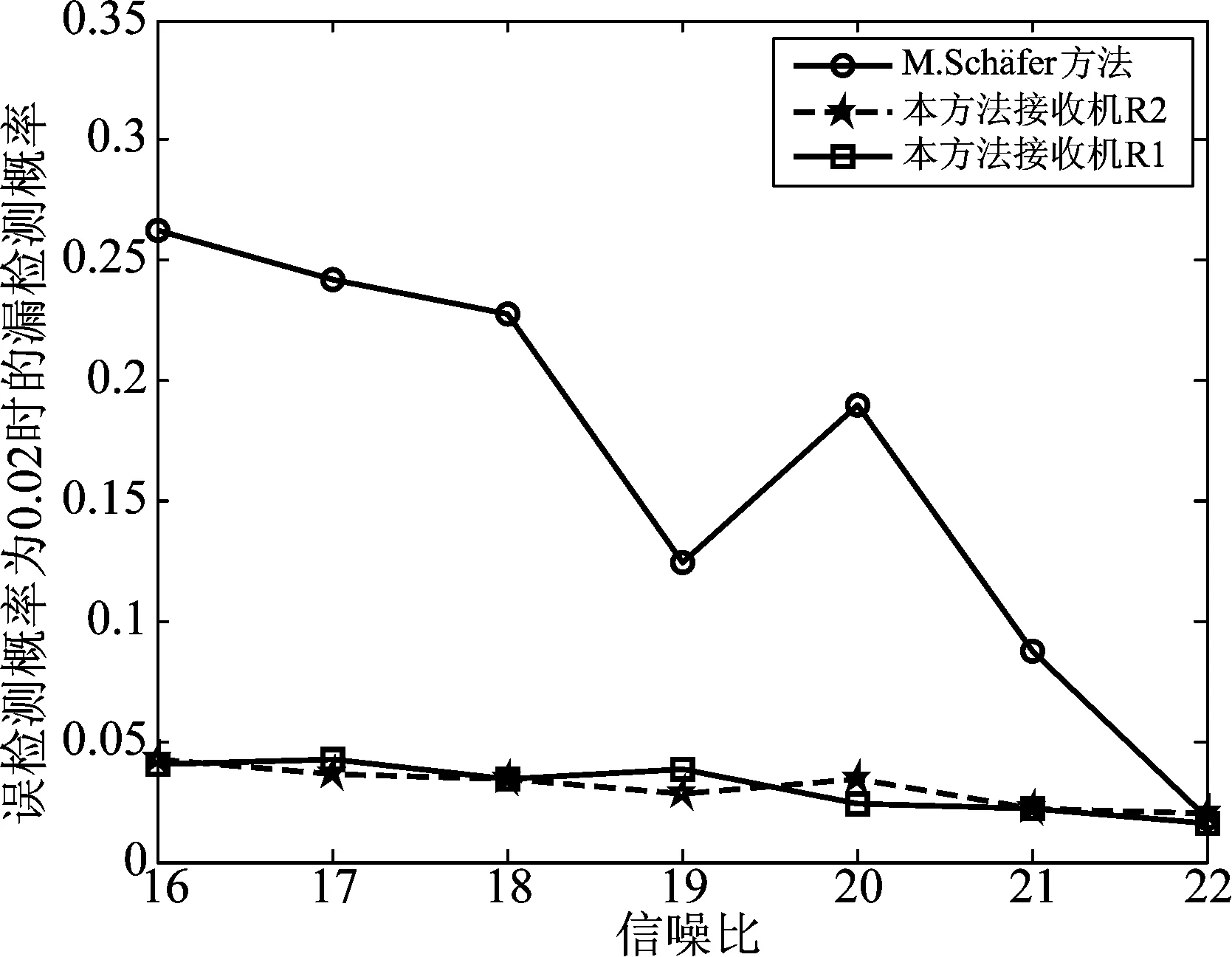
图6 本方法与M.S方法检测效果比较Fig.6 The comparison of two detection method
5 结论
本文提出了一种基于多普勒频偏的欺骗式干扰检测方法,对于飞机目标报告的一组信息,可分别根据其信号和报文内容计算一组频偏,对于真实目标,根据其信号估计出的频偏与报文内容计算出的频偏应为线性关系,而对于欺骗干扰目标,则不存在这种相关性。利用这种相关性,避免了机载的ADS-B发射机的中心频率存在频偏对使用多普勒来判定欺骗干扰目标的影响,使得多普勒效应能够被应用于欺骗干扰检测中。在频率估计过程中,方法充分利用了飞机发射的各种类型的ADS-B消息,以提高检测准确率。相比于其他方法,本方法由于充分利用了各种类型的ADS-B消息,减少了对于其他接收机的要求,仅需单天线的单一接收机即可实现判决。实际应用中,由于同频的二次雷达信号等可能与ADS-B信号产生同频干扰,会影响到频偏的估计,所以需要对信号进行筛选。
猜你喜欢
导航定位学报(2022年2期)2022-04-11
导航定位学报(2022年1期)2022-02-17
青年歌声(2019年12期)2019-12-17
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
电子制作(2016年1期)2016-11-07