一种结合FES的足下垂康复助力机构设计
2018-07-25 09:25:42伟达
机械与电子 2018年7期
,, ,伟达,,
(苏州大学机电工程学院江苏省机器人与微系统研究中心,江苏 苏州 215021)
0 引言
目前,治疗足下垂的康复方法有医护人员康复训练法、功能性电刺激疗法和穿戴增强功能性踝关节外骨骼法。医护人员康复训练法虽然可以帮助足下垂患者进行康复训练,有助于患者的康复,但是此方法不仅受限于医护人员的数量和经验,同时也难以得到客观定量的康复训练评价指标[1]。功能性电刺激疗法可以防止肌肉萎缩,增强肌力,加强神经冲动,促进肢体血液循环以及神经再生,达到康复的目的[2];但是,功能性电刺激容易使患者被刺激的肌肉产生疲劳,增大患者在行走时摔倒的风险[3- 4]。随着康复机器人技术的发展,对于足下垂的矫正康复带来了一些新的方案,如采用增强功能型踝关节外骨骼作为助力装置,但是由于技术并不是十分成熟[4],现有的助力装置体积、重量较大,依然存在着便携性差的问题,而且由于采用电源供电,其还存在着有限的机械功率和能源供给问题[5- 7]。
针对上述情况,提出了一种结合功能性电刺激的足踝背屈助力机构,根据步态检测系统,同时触发功能电刺激和助力机构,一方面刺激患者患肢小腿处的胫骨前肌使得肌肉收缩抬足,另一方面,助力机构带动足部抬起,二者共同帮助踝关节背屈,以达到足够的离地间隙,改善患者的行走能力。功能性电刺激的使用,发挥了患者肌肉收缩的能力,同时降低了对电机和电源的要求,能够选用体积较小的电机和电源,降低了能耗,增强了整个机构的便携性和可穿戴性。
1 下肢步态检测方法
人体下肢运动是一个典型的周期性运动,1个步态周期由站立相和摆动相组成,站立相约占步态周期的60%,摆动相占剩下的40%。根据人体的踝关节角度曲线[8],整个步态周期可以分成4个部分:第1次趾屈阶段(PF1),第1次背屈阶段(DF1),第2次趾屈阶段(PF2),第2次背屈阶段(DF2),如图1所示。

图1 踝关节角度曲线
与正常人体步态相比,足下垂患者的步态首先是整个脚掌着地,在摆动相时期,足处于跖屈位且完全不能主动背屈,而且伴有足内翻。为了能够帮助足下垂患者正常行走,也就是能够让患者的踝关节角度类似于正常人体的踝关节角度,即踝关节角度为本文设计的目标变量。为了能够检测下肢步态的相位信息,采用足底压力传感器作为检测元件。根据足部与地面是否接触,又可以将1个完整步态分为4个步态相位,分别是足跟着地、足放平、足跟离地和足尖离地。本文将足跟着地、足放平、足跟离地和足尖离地与上文提到的4个阶段一一对应起来,如图2所示。通过足底力传感器检测足部与地面是否接触,从而判断下肢运动的4个阶段。
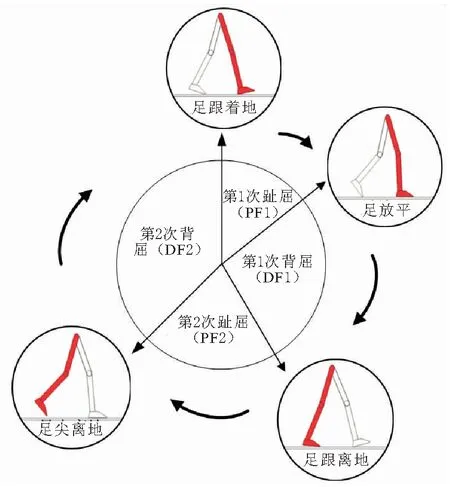
图2 人体步态划分

图3 足底力检测模块实物及安装位置
为了能够准确地判断下肢的运动状态,4个薄膜型压力传感器被安装在足底,安装位置如图3所示。足跟着地时与地面接触的位置比较集中,所以在足跟处,粘贴1个足底力传感器;在前脚掌处粘贴3个足底力传感器,分别粘贴在足尖、第1跖骨和第4跖骨处,原因是前脚掌着地时与地的接触位置不具有对称性而且面积比较分散,只要3个传感器中的1个有信号就可以判断足尖着地。
2 功能性电刺激
在踝关节趾屈/背屈运动主要关联肌肉群中,使踝关节趾屈的主要肌肉有腓肠肌和比目鱼肌,背屈的主要肌肉是胫骨前肌[9]。所以通过刺激患肢的胫骨前肌来可以使患者踝关节做背屈运动,帮助患者行走。
本文FES单元采用电压刺激方式,波形为对称双向波;刺激时的电压幅值可调,频率可调,调节的方法是在源程序中修改;触发方式为足底压力模块触发,具体功能及功能参数如表1所示。
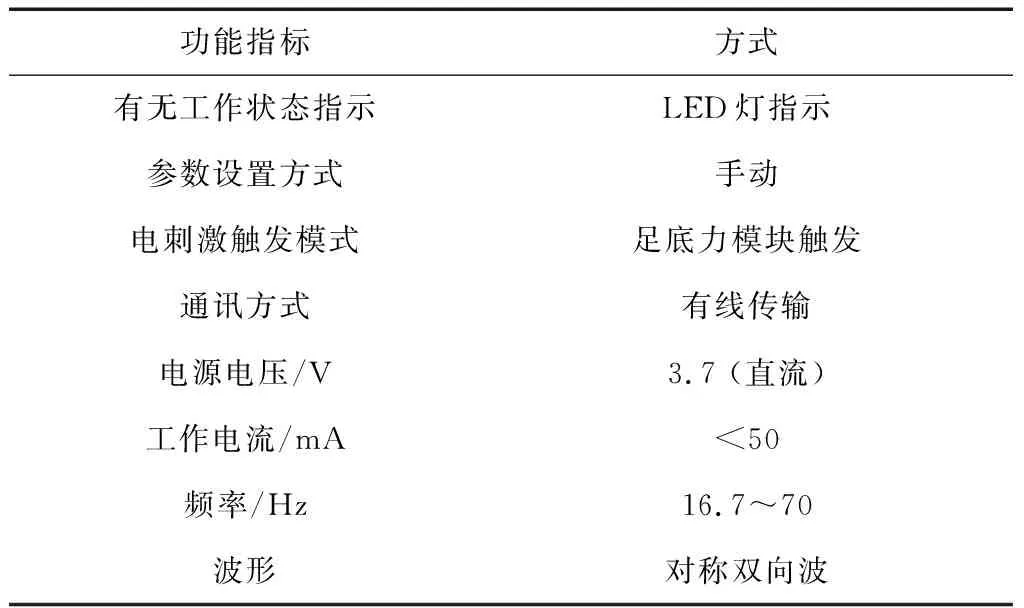
表1 FES单元功能及功能参数
FES单元硬件主要包括控制器模块、升压模块、脉冲电刺激产生模块、电刺激电极片和电源模块等,如图4所示。控制器采用STM8S003F3控制器作为主控制核心。该控制器系统频率高达16 MHz,具有丰富的片外资源,主要包括8 kB的Flash存储器、多路10位的ADC通道、3个定时器计数器、1个异步串行通信接口和1个SPI串行口等。控制器模块根据步态控制系统给定的信号,产生相应幅度的电刺激波形。升压电路采用最基本的Boost升压电路。电刺激脉冲产生模块可以产生正负双极性脉冲刺激信号。电极片是连接FES单元与胫骨前肌的执行器件。本文采用的是导线式脉冲电极片,这是一种具有粘性可重复使用多次的电极片,贴片尺寸为50 mm×50 mm。电源模块主要用于产生3.3 V电压和12 V电压,分别为控制器、Boost升压模块和脉冲电刺激模块提供电能。FES单元实物如图5所示。

图4 FES单元组成
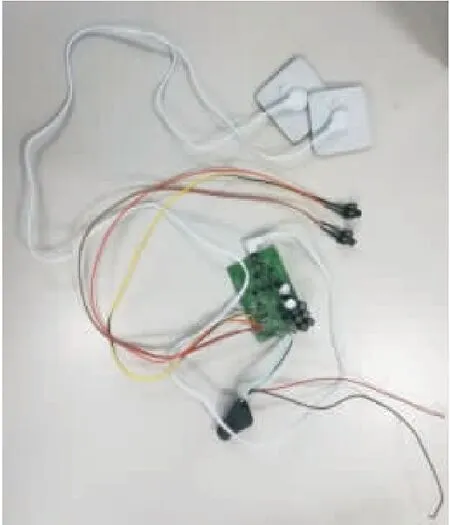
图5 FES单元实物
3 足踝背屈助力机构
足下垂患者并没有足跟着地这一时刻,而是整个脚掌着地,在摆动相时期,足处于跖屈位且完全不能主动背屈,呈现“画圈步态”,且伴有足内翻。这些异常步态不仅给患者带来了大量的能量消耗,同时也大大降低了患者持续行走的时间,并且增加了患者跌倒的风险[3]。为了能够帮助足下垂患者矫正异常步态,主要从以下2个方面考虑:
a.避免患者整个脚掌着地,帮助患者足跟着地,缓慢地将脚掌触地以防患者因为重心过渡不稳导致跌倒。
b.在摆动相,帮助患者进行背屈动作,完成廓清运动。
根据以上2个要求,设计了一种足踝关节背屈助力机构。该助力机构主要由驱动电机、定制的涡轮蜗杆减速器、卷绕轴、牵引带、拉簧、导向轴、脚部连接件和小腿连接机构组成,如图6所示。首先,拉簧的使用起到缓冲和储能的作用,保证机构提供的助力是一种渐变式,而非一种突变式的。其次,助力机构和功能性电刺激的结合使用,充分发挥了患者肌肉收缩的能力,同时降低了对电机和电源的要求,能够选用体积较小的电机和电源,降低了能耗,增强了整个机构的便携性和可穿戴性。
助力机构实物如图7所示。驱动电机采用的是有刷直流电机,功率为90 W,型号为Maxon RE 35。涡轮蜗杆减速器为自主设计的,减速比为30的减速器。脚部连接件用于牵引带和足部的连接,小腿连接机构由低温热塑板和2个绑带组成,用于连接机构和小腿。驱动电机和蜗轮蜗杆减速器通过联轴器连接,蜗轮蜗杆减速器和卷绕轴通过联轴器连接;当电机转动时,卷绕轴缠绕或者释放牵引带,从而达到拉动足部和释放足部的作用。
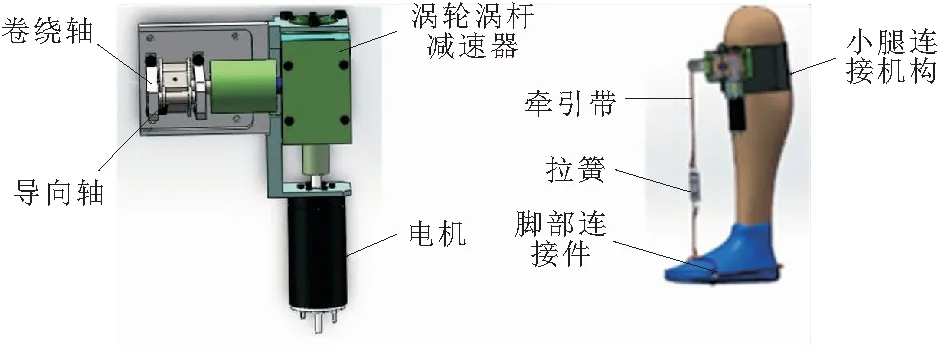
图6 机构三维模型

图7 机构实物
4 控制方法
控制方法采用传统PID方法。控制器接收下肢检测模块信号的输入,进行步态相位判断,打开或关闭FES单元,并输出刺激脉冲给胫骨前肌,同时对直流有刷电机进行位置、速度双闭环控制。控制器采用ARM系列STM32F103RBT6,主控芯片自带正交编码器接口,可以方便地对电机进行伺服控制。驱动电路板采用H桥电路,可适应24~48 V,100 W以内的电机。控制系统硬件的组成如图8所示。控制程序流程如图9所示。

图8 控制硬件组成
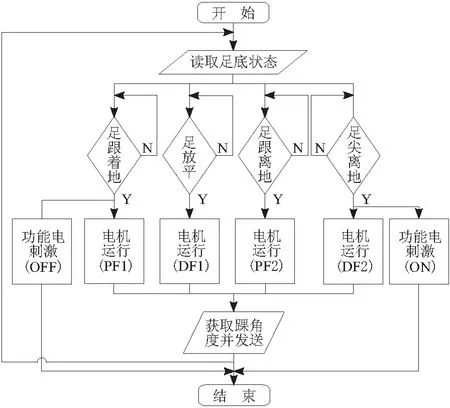
图9 控制程序流程
5 工作过程
足下垂康复助力系统主要由下肢步态检测模块、功能性电刺激、足踝背屈助力机构和PID控制器构成。下肢步态检测模块根据足底压力估计步态相位,驱动电机运转,为足下垂患者提供主动助力;同时打开或者关闭功能性电刺激。当踝关节角度为零时,电机此时设定为零位。电机使踝关节背屈为正;反之,使踝关节趾屈为负。
第1阶段(PF1),当足跟着地时,电机反转通过卷绕轴缓慢释放线绳,防止患者整个脚掌瞬间着地,同时关闭功能性电刺激;第2阶段(DF1),第3阶段(PF2),当足放平时,电机正转通过传动装置拉动线绳;当足跟离地时,电机反转通过传动装置快速释放线绳,防止阻碍足跟上抬,增加脚部蹬地力量;第4阶段(DF2),当足尖离地时,电机正转通过传动装置拉动线绳,打开功能性电刺激,刺激患者患肢胫骨前肌,帮助患者进行背屈运动,从而达到廓清运动的目的。
6 结束语
根据人体步态的踝关节角度,将步态分为4个阶段,分别是第1次趾屈(PF1)、第1次背屈(DF1)、第2次趾屈(PF2)和第2次背屈(DF2);根据足部与地面的接触情况与上述4个阶段一一对应;同时提出了将功能性电刺激与踝关节助力机构结合的方法。目前,本文已经完成了足底力采集模块和FES单元的搭建,踝关节助力机构的研制,以及该系统的控制系统的搭建和软件调试。后续,会用实验定量地验证本文提出的方法。
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
世界科学技术-中医药现代化(2022年3期)2022-08-22 00:24:10
中老年保健(2021年7期)2021-08-22 07:42:36
模具制造(2019年3期)2019-06-06 02:10:56
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:12
中国民族医药杂志(2016年5期)2016-05-09 07:43:57
中国洗涤用品工业(2016年2期)2016-02-28 19:03:15
发明与创新(2015年33期)2015-02-27 10:40:00