
压缩式垃圾车翻桶机构的设计与优化*
2018-07-25 06:40姜美莲林卫国
机械制造 2018年3期
□李 硕 □姜美莲 □洪 灿 □林卫国
1.武昌首义学院 机电与自动化学院 武汉 430064
2.江西新能源科技职业学院机电工程学院 江西新余 338000
3.华中农业大学工学院 武汉 430074
1 研究背景
城市现行清运垃圾的主要工具是压缩式垃圾车,它能收集大量生活垃圾,减轻环卫工作者的劳动强度,并且能解决垃圾运输过程中的二次污染问题,避免对市容市貌造成不良影响。但是,目前压缩式垃圾车翻桶装置中的压紧垃圾桶机构多为随动机构,没有专用机械结构对垃圾桶受到的压力和抬升运动进行控制,且不同型号的垃圾桶存放的垃圾量不同,在翻转时受到的力也不同,会产生垃圾桶易损坏和效率低等问题[1]。为此,笔者设计并优化了一种压缩式垃圾车翻桶机构,一方面使垃圾清运车更加智能高效,另一方面也可避免垃圾清运过程中可能产生的不必要生命财产损失[2]。
2 翻桶机构简介
压缩式垃圾车已成为城市生活垃圾收集运输的主要工具,由于受多方面原因的影响,生活垃圾收集形式多种多样,如何将各种不同规格的垃圾桶内垃圾智能便捷地装入压缩式垃圾车,成为压缩式垃圾车研发时必须解决的问题[3]。压缩式垃圾车翻桶动作如图1所示,其中翻桶机构是关键。要使垃圾倒入垃圾车内的过程中避免损坏垃圾桶,且不对环境产生二次污染,因此翻桶机构的设计尤为重要。
翻桶机构是压缩式垃圾车将垃圾桶内生活垃圾倾倒入垃圾车内压缩储存的执行机构,合适的托架尺寸有助于减少和避免翻倒过程中垃圾的散落,改善垃圾桶的受力情况,使压缩式垃圾车工作性能更好。

▲图1 压缩式垃圾车翻桶动作
3 翻桶机构的设计
3.1 负载的确定
翻桶机构运行由内燃机和电动机提供动力,然后由液压缸活塞杆推动连杆,将垃圾桶抬升到合适高度后倾倒垃圾。翻桶机构受力如图2所示。翻桶机构采用液压系统,在工作过程中,可以通过调节溢流阀来改变液压缸的输出推力。
目前市面上垃圾桶的材料有塑料、不锈钢、玻璃钢等,垃圾桶容量为 50~1 200 L。垃圾桶装满垃圾后质量为50 kg~1 t,因此,液压缸在工作过程中需要输出的推力为 0.5~10 kN。
3.2 垃圾桶夹紧装置
夹紧装置是压缩式垃圾车翻桶机构的重要组成部分,在整个翻桶机构工作过程中用于控制力的变化。在垃圾桶抬升到最高点时,为了使垃圾桶中的垃圾倾倒干净,此时会重复急速向上抬升,垃圾桶所受的压力和扭力突然变化,可能会造成桶体破损或桶耳上的把手出现断裂。为避免以上情况,笔者设计了一种弹性夹紧装置,如图3所示。
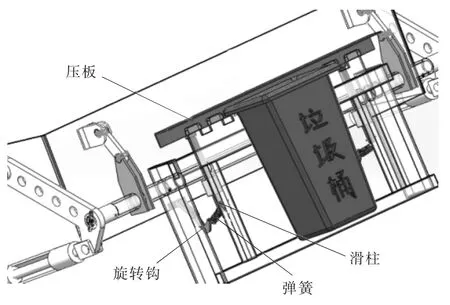
▲图3 弹性夹紧装置示意图
弹性夹紧装置利用连杆机构对弹簧进行控制,将弹簧力由滑柱传递至压板,压板压紧垃圾桶,使垃圾桶在抬升过程中受力平稳,且垃圾桶的受力作用点始终在桶耳正上方。将桶放上挂架,然后液压缸工作,使垃圾桶向上抬升,这时压板随即压紧垃圾桶。由于弹簧有伸缩力,因此无论垃圾桶自重如何,都能及时调整压紧力,使桶固定在挂架上。当抬升到极限位置时,旋转钩会随挂架运动而改变角度,使垃圾桶受到的力不发生改变。液压缸往复推拉,垃圾完全倾倒,装置上的弹簧随之改变力的大小,使桶能平稳地在挂架上。弹性夹紧装置自动改变夹紧力的作用点,可以使垃圾桶在翻倒过程中受力更加均匀,避免垃圾桶损伤,不会出现垃圾桶脱落现象,保证了工作人员的安全。
4 翻桶机构建模与仿真
在SolidWorks软件中对翻桶机构进行三维建模[4-5],如图4所示。在建模的基础上对翻桶结构进行了运动仿真,显示可以较好地完成翻桶动作,且对垃圾桶的损坏程度较小[6]。

▲图4 翻桶机构模型图
5 旋转钩有限元分析
在弹性夹紧装置中,旋转钩在翻倒垃圾桶时传导夹紧力,确保夹紧力方向不变,所以旋转钩是一个受力危险部件。旋转钩的有限元分析对翻桶机构在结构可行性、材料选择及生产制造方面显得尤为重要。图5所示为旋转钩网格划分图[7-10]。
在ANSYS软件中对旋转钩压力面施加压力,在参数设置栏Magnitude项目中输入10 kN,然后选定力的方向,变形与应力云图分别如图6、图7所示。
6 旋转钩优化设计
由图6和图7可以看出,旋转钩的最大变形和应力集中位置在圆形孔处。旋转钩所受的扭转力较大,超出材料承受范围。所以,要增大旋转钩一端的宽度,这样可以增大受力面积,同时提高整体的刚度,使旋转钩不易断裂。
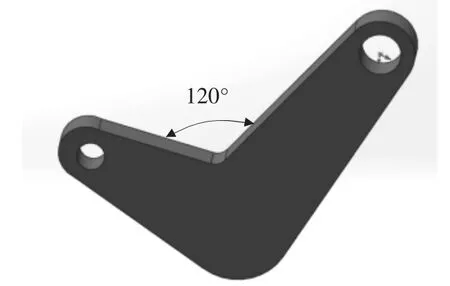
在翻桶机构翻倒垃圾时,旋转钩应尽量与挂架的运动保持平行,此时旋转钩所受的扭转力较小,所受的拉力也会随之变小。可见,选取好的旋转钩角度可以从源头上解决旋转钩受力过大及不均匀的问题。对旋转钩进行优化设计,优化后的旋转钩角度为120°,如图8所示。
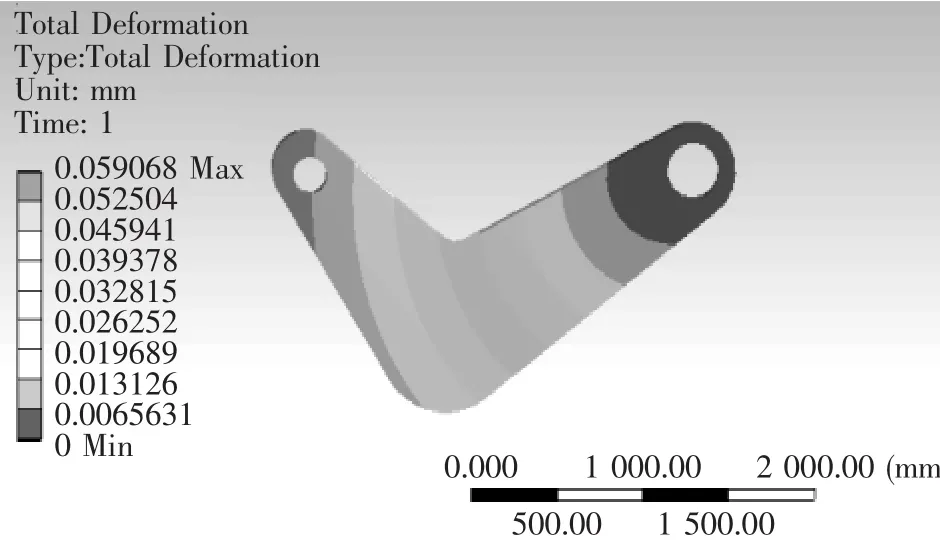
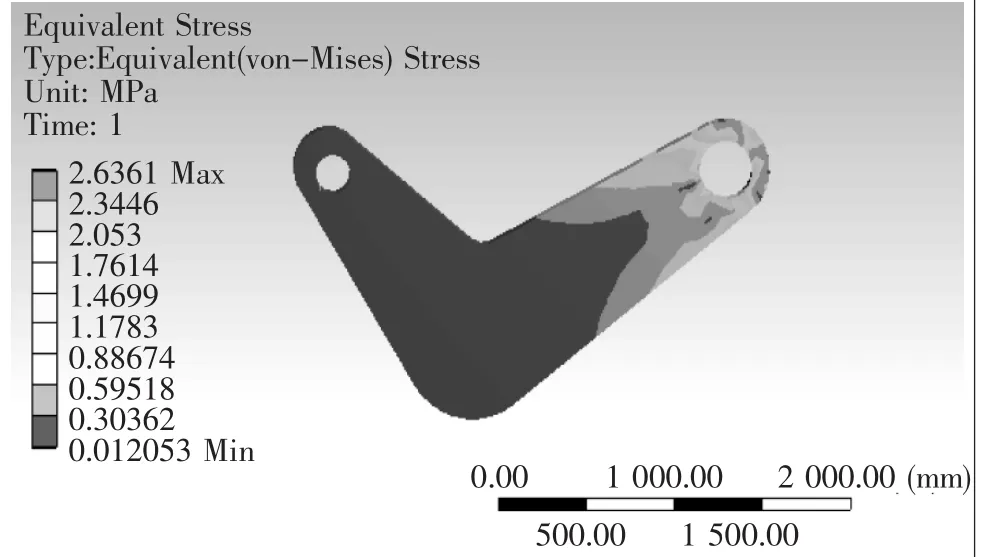
优化后旋转钩变形和应力云图分别如图9、图10所示,与优化前作对比,确认旋转钩的应力和变形都有明显减小,并且分布比较均匀,最大承重载荷可以达到18 kN,优化设计有效。
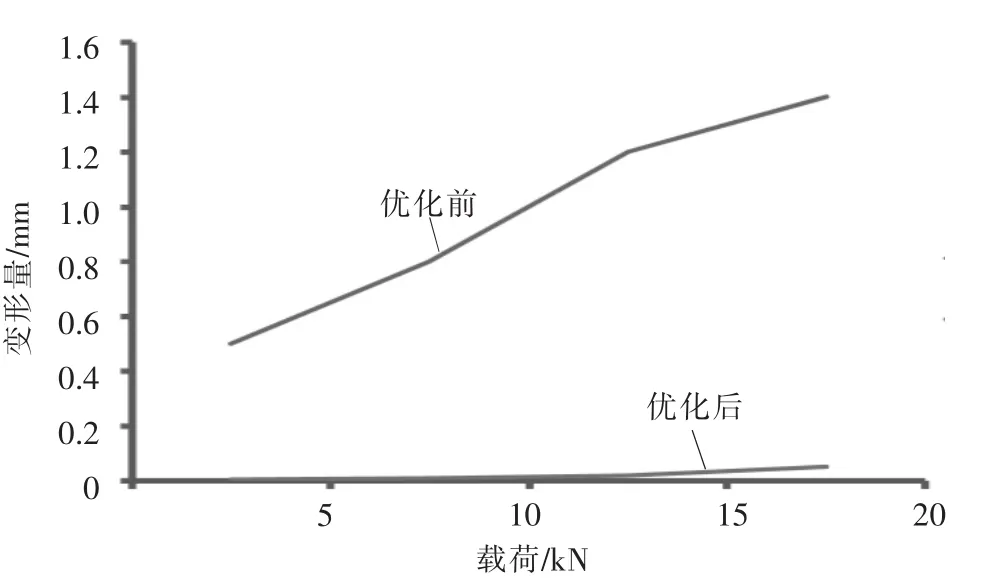
在最大载荷达到18 kN时,优化前的旋转钩变形已经处于失效状态。对旋转钩进行优化设计后,对应的变形仅为0.05 mm,可以正常使用。旋转钩优化前后受力变形对比如图11所示。
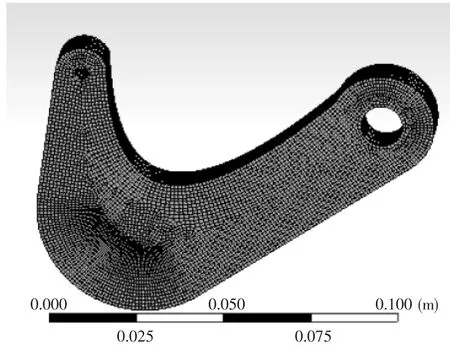
▲图5 旋转钩网格划分
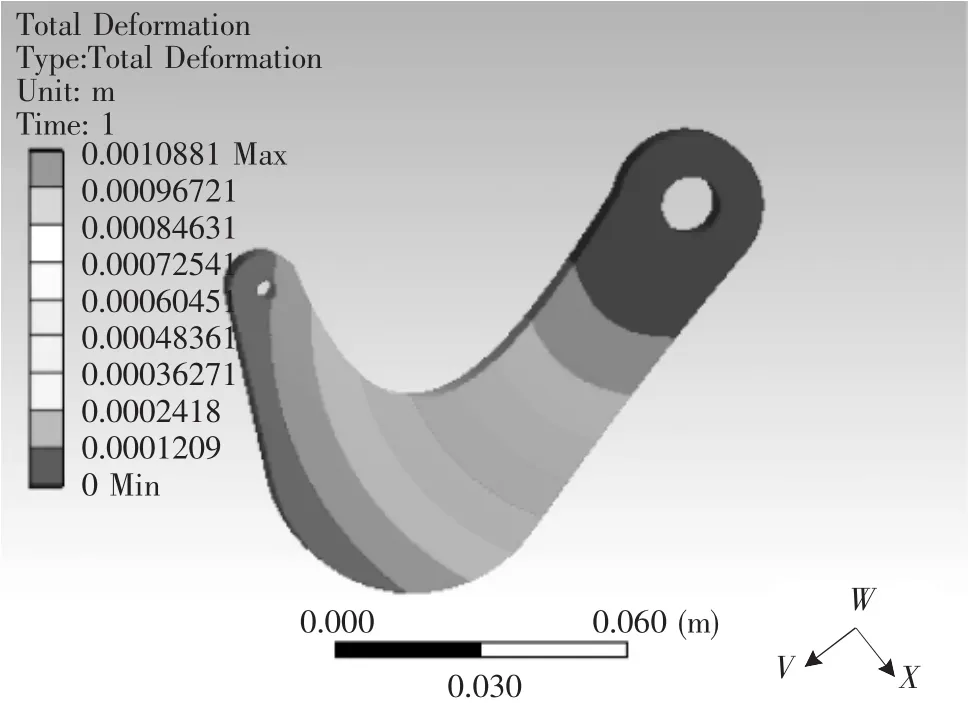
▲图6 优化前旋转钩变形云图
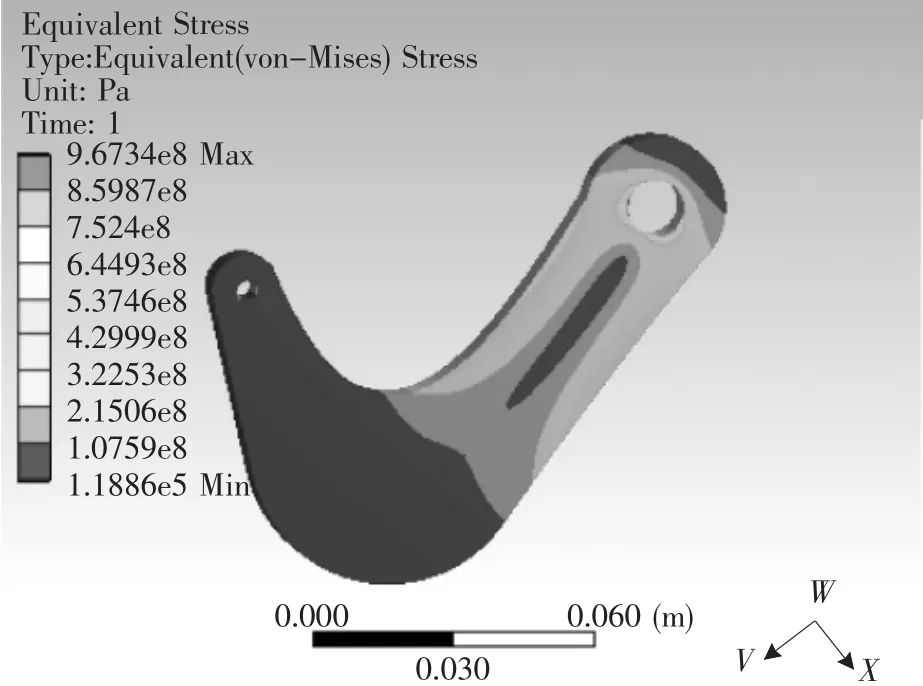
▲图7 优化前旋转钩应力云图
7 结束语
笔者在压缩式垃圾车的基础上进行改进,完成了翻桶机构的整体设计,并完成关键部件旋转钩的有限元分析与优化。这一翻桶机构的优点如下:
(1)使垃圾桶在翻倒过程中受力均匀,避免损伤垃圾桶;
▲图8 优化后旋转钩示意图
▲图9 优化后旋转钩变形云图
▲图10 优化后旋转钩应力云图
▲图11 旋转钩受力变形对比图
(2)自动改变夹紧力作用点,使垃圾桶在翻倒过程中平稳,不会出现脱落现象,保证工作人员的安全;
(3)翻桶机构对垃圾桶的夹紧力随垃圾桶重力的大小而变化,较好地保护了设备。
翻桶机构的设计采用了现代工业广泛应用的计算机辅助设计、制造、工程技术,充分考虑设备的性能、成本及市场,并对设备进行设计和优化分析,具有一定的应用价值。
猜你喜欢
重型机械(2020年2期)2020-07-24
中国农资(2019年44期)2019-12-03
中国现代中药(2019年5期)2019-07-03
娘子关(2018年2期)2018-11-13
制造技术与机床(2017年5期)2018-01-19
名家名作(2017年3期)2017-09-15
专用汽车(2016年9期)2016-03-01
专用汽车(2016年4期)2016-03-01
小天使·四年级语数英综合(2015年3期)2015-04-20
专用汽车(2015年4期)2015-03-01
