
大型无人潜水器吊具的设计与试验验证
2018-07-25 06:40:40付佳杰
机械制造 2018年3期
□付佳杰
中国船舶重工集团公司第七一〇研究所 湖北宜昌 443003
1 研究背景
目前,海洋仍有未被人类充分认识和利用的空间。随着陆地资源的减少,人类生存对海洋的依赖度空前增长。无人潜水器作为认识和开发海洋不可或缺的有效工具,近年来得到快速发展。一直以来,布放回收技术是无人潜水器广泛应用的瓶颈,研制安全、可靠、有效的自动或半自动布放回收装置是重要课题[1-2]。当前,无人潜水器典型布放回收系统主要包括单臂收放系统[3]、门形架收放系统[4]、集成式收放系统[5]、船舯月池式收放系统[6]、滑道式收放系统[7]、潜艇布放回收系统[8-9]等。这些布放回收系统通常较复杂,大多需要母船支持,适用于水面母船布放回收中小型无人潜水器。大型无人潜水器由于吨位和体积大,在母船上布放回收难度较大。笔者针对大型无人潜水器岸基布放的特点,设计了一种专用吊具,并进行了试验验证。
2 设计要求
所设计的吊具适用于大型无人潜水器岸基布放和回收,额定起吊质量20 t。吊具挂钩与脱钩在岸上操作,不需要人员下水操作或由小艇靠近无人潜水器辅助操作。
吊具具有适应无人潜水器质心轴向变化的调节能力。如图1所示,利用无人潜水器中部凸起的两个起吊环作为吊具的起吊接口。无人潜水器是由成百上千个零部件组成的一个复杂系统,考虑加工制造误差,无人潜水器组装完成后的质心相对于初始设计的质心会有一定偏离。另外,无人潜水器配置不同的模块化载荷时,质心也会有一定变化。基于以上原因,要求无人潜水器质心在中点左右各偏离300mm区间内时,吊具均能平衡起吊。
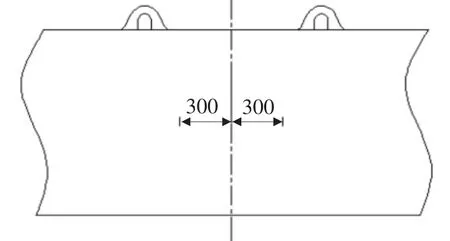
▲图1 无人潜水器吊具接口
3 结构组成
大型无人潜水器吊具由吊环、链轮及支架、导链结构、钢链、主梁框架、锁钩等部分组成,如图2所示。
吊环主要与起重设备的吊钩连接,设计时要保证吊环内孔的尺寸大于对应的起重设备吊钩的尺寸,使起重设备的吊钩能够轻松穿过吊具吊环。链轮及支架在导链结构的作用下,可以根据无人潜水器质心的变化在钢链上自由滑动,以适应无人潜水器不同的质心位置。主梁框架下部设有喇叭形导向装置,其内部形状与无人潜水器中部吊环外形一致,可引导吊具锁钩与无人潜水器中部吊环快速定位对接。
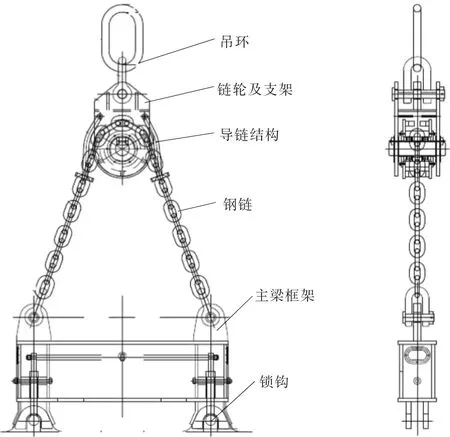
▲图2 无人潜水器吊具结构
在主梁框架的两端设有一对锁钩,可通过岸上人员拉动绳索来控制锁钩的闭锁和开锁,锁钩状态如图3所示。闭锁后,岸上人员可通过拉动绳索来控制挡销的位置,限制锁钩保持闭锁状态,保证无人潜水器布放回收时不会因为晃动而脱钩。
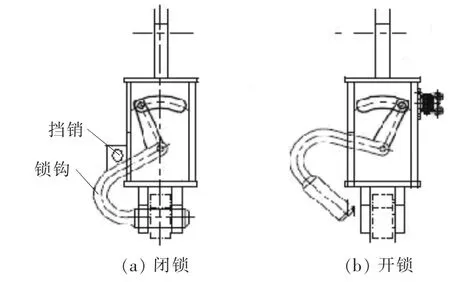
▲图3 锁钩状态
4 工作原理
回收过程指将无人潜水器从水面吊装至岸上。由于无人潜水器在水上,人不方便靠近,因此回收过程通常比布放过程复杂。
回收前,无人潜水器漂浮在靠近岸边水面上,通常岸上保障人员可用撑杆和钩杆适当调整无人潜水器姿态,防止无人潜水器碰撞岸边或船体。用吊具回收无人潜水器时,需要确认吊具锁钩应处于闭锁状态。吊具整体状态如图4所示。启动吊车,移动吊具至无人潜水器吊环正上方,向下移动。当吊具接近无人潜水器时,站在岸上的人员拉动与挡销连接的绳索2,克服挡销内部的弹簧弹力后即可打开挡销。此时,锁钩闭锁限位被解除,再拉动绳索1即可打开锁钩。控制吊车使吊具下行,导向装置与无人潜水器吊环定位对接后,松开绳索1,吊具锁钩挂住无人潜水器吊环,然后松开绳索2,挡销在弹簧恢复力作用下弹出,将锁钩位置锁定。此时,吊具已进入吊重工作状态。控制吊车起吊无人潜水器离开水面,并移动至搁置架上,吊具锁钩不受无人潜水器重力作用,拉动绳索2,解除挡销限位,再拉动绳索1即可打开锁钩,实现吊具与无人潜水器的分离。至此,无人潜水器回收完成。
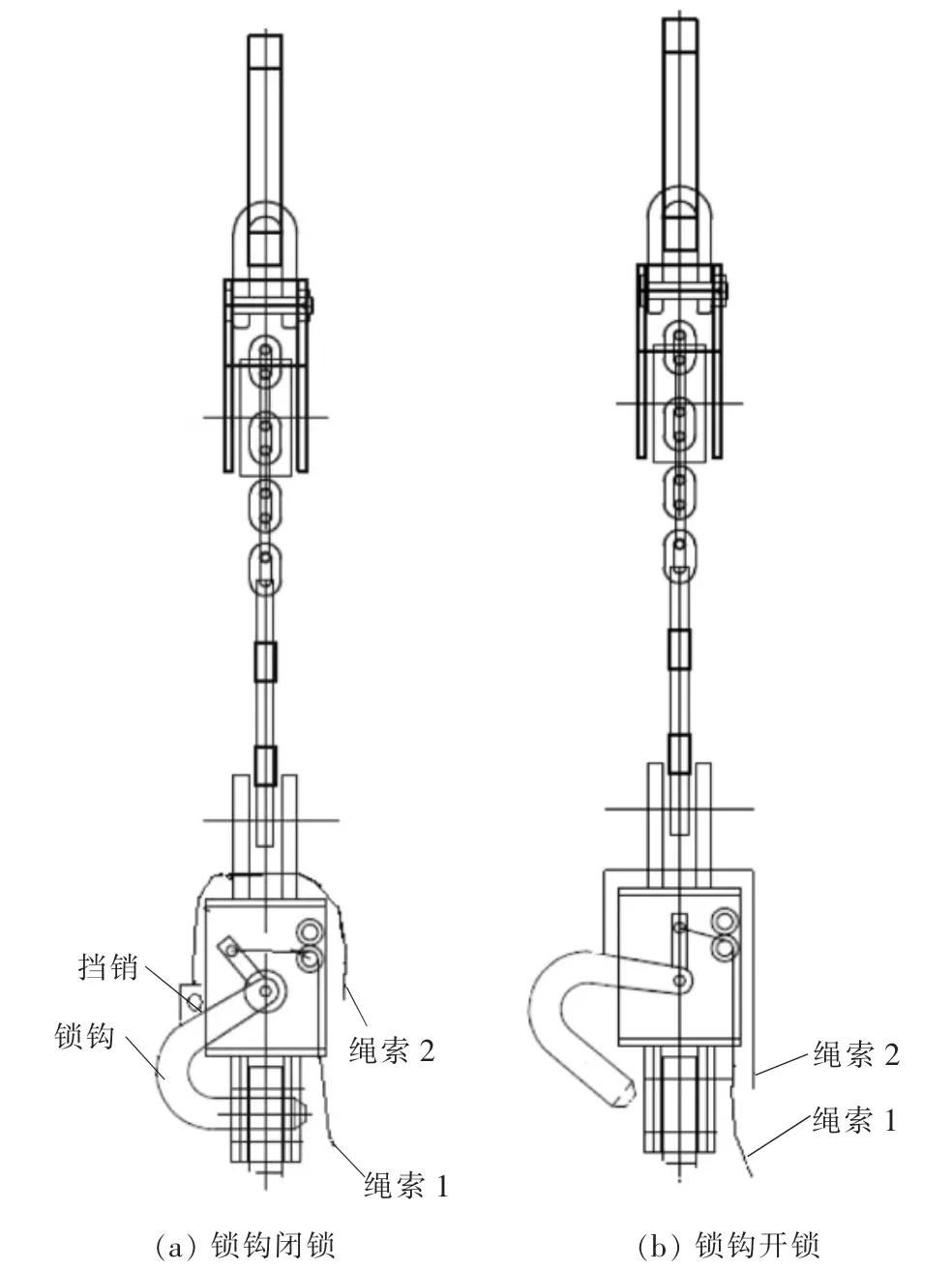
▲图4 吊具整体状态
布放过程是回收过程的逆过程,相对而言较简单。需要说明的是,将无人潜水器布放至水面后,需要利用浮力作用,消除或减小无人潜水器重力对吊具锁钩的影响。此时,挡销受到的锁钩挤压力也较小,可以轻松地拉开挡销,再拉动绳索1,即可打开锁钩,实现吊具与无人潜水器的分离,完成无人潜水器布放。
5 试验验证
大型无人潜水器吊具加工调试完成后,需要通过承载试验来验证吊具的承载能力,以确保吊具在正常使用时可靠安全。吊具承载试验借鉴集装箱吊具标准静载试验和动载试验的规定进行[10]。
5.1 挂钩脱钩方便性验证
吊具在承载试验验证前,用真实无人潜水器产品做试验有一定风险,因此为了比较真实地反映无人潜水器实际起吊过程,制作了一件吊具配重接口。这一接口上部两个吊环的外形尺寸和间距与无人潜水器产品完全一致,在吊具配重接口两端分别设置一个圆形孔,用于连接钢丝绳挂配重。通过手拉绳索2和绳索1,验证吊具与吊具配重接口间的挂钩和脱钩均比较顺利[11]。
5.2 吊具承载能力验证
起吊25 t(1.25倍额定载荷)的均布载荷,离开承载面100 mm,确认安全后,再起吊28 t(1.4倍额定载荷)的均布载荷,离开承载面100 mm,悬吊10 min,然后缓慢放下,目测观察所有零件、部件、构件均无永久性变形,满足20 t的额定载荷承载能力要求,并有不小于1.4倍的安全因数。
5.3 吊具质心调节及动态承载能力验证
如图5所示,吊具配重接口质量为0.29 t,吊架组件质量为 17.5 t,重块1质量为 4.65 t,重块2质量为2.56 t,则总质量为25 t。将重块1和重块2偏离吊架质心一段距离,使吊具下重物的质心偏离中心达到300 mm。起吊25 t偏心载荷三次,保持10 min,待吊具稳定后,启动吊车纵向、横向快速摆动,完成验证后将重物缓慢放下。
吊具质心调节能力及动态承载能力验证实物如图6所示,观察整个过程发现,吊具链轮在钢链上能够自动调节,吊具和重物基本保持水平,各零部件无永久性变形,满足无人潜水器质心在中点左右各偏离300 mm区间内均能平衡起吊的要求。

▲图5 吊具质心调节及动态承载能力验证
6 结束语
笔者设计的大型无人潜水器吊具,可根据被吊装无人潜水器质心变化而自适应调节,通过试验验证了无人潜水器质心在左右300 mm范围内变化时,吊具均可以安全平稳起吊,适用于大型无人潜水器的岸基布放与回收,且挂钩与脱钩操作不需要人员下水或由小船靠近操作,使用维护方便,具有一定的工程应用价值。

▲图6 吊具质心调节及动态承载能力验证实物
猜你喜欢
作文周刊·小学六年级版(2023年32期)2023-08-17 21:11:50
起重运输机械(2021年21期)2021-11-24 08:24:34
装备制造技术(2020年9期)2021-01-26 00:15:18
中国船检(2019年6期)2019-11-29 17:05:54
专用汽车(2018年10期)2018-11-02 05:32:34
船海工程(2018年5期)2018-11-01 09:14:48
中国军转民(2017年9期)2017-12-19 12:11:30
环球时报(2017-08-14)2017-08-14 11:36:06
大型铸锻件(2016年4期)2016-08-16 10:31:19
山西大同大学学报(自然科学版)(2014年5期)2014-01-23 01:58:04
