
分布式电驱动车辆的ACC协同控制∗
2018-07-24 06:19解来卿罗禹贡李升波李克强
汽车工程 2018年6期
解来卿,罗禹贡,李升波,李克强
(1.清华大学,汽车安全与节能国家重点实验室,北京 100084; 2.中国人民解放军陆军研究院通用装备研究所,北京 102202)
前言
集成智能汽车技术和新能源汽车技术的智能环境友好型车辆,是针对汽车安全、节能、环保和舒适的综合需求提出的新概念车辆,它兼备智能化、电动化和网联化汽车特征,代表了新一代汽车发展的一个主要方向[1-2]。搭载了自适应巡航控制(adaptive cruise control,ACC)系统的智能分布式电驱动车辆正是这一技术概念的典型应用。
近年来,针对电动车的ACC系统研究受到越来越多的关注。文献[3]中研究了插电式混合动力电动汽车的节能型ACC系统,采用非线性模型预测控制的方法,特定工况下节能最高可达15%。文献[4]中提出了基于雷达、机器视觉信息的混合动力系统分层预测控制方法,基于制定的最优巡航轨迹,采用模型预测控制(model predictive control,MPC),可降低能耗5%。文献[5]中研究了自主电动汽车的ACC优化策略,采用基于动态规划的算法,兼顾了安全与节能。文献[6]~文献[8]中在对传统车辆自适应巡航控制方法大量研究的基础上,对混合动力车辆和电动车辆的自适应巡航控制方法进行了研究,设计了安全、经济与舒适的多目标优化算法,并针对控制实时性问题,提出了基于分步动态规划的离线优化、在线查表的方法,实现了多目标的协同优化[9-10]。综上所述,电动车的ACC研究日益得到重视,而针对分布式电驱动车辆的ACC研究相对较少。如何基于分布式电驱动车辆的动力响应特性,实现安全与节能等多目标的协同控制,并兼顾控制的最优性和实时性,还有待进一步探讨。
为此,本文中以智能分布式电驱动车辆(intelligent-distributed electric vehicle,i-DEV)为研究对象,在分析其结构与特性的基础上,提出一种基于MPC理论的ACC算法,并对其实时性进行改进。首先分析i-DEV系统结构组成及其特点,并采用频率响应法辨识其纵向动力学特性;接着建立跟车系统广义纵向动力学模型,设计综合安全、节能和舒适的性能指标,采用模型预测控制算法,解决多目标协同优化问题;随后采用缩减优化问题规模的方法,缩短单步求解的计算时间,提升在线优化运算效率,解决控制实时性问题;最后搭建基于CarSim与Simulink的联合仿真平台,分别采用计算机仿真和硬件在环试验,验证了系统性能和控制的实时性。
1 i-DEV结构与特性分析
1.1 i-DEV系统结构组成
i-DEV系统结构简图如图1所示,它包含有智能信息交互、清洁能源动力与四轮独立驱动电控底盘3大系统。其中,智能信息交互系统包含雷达、摄像头、通信设备、卫星定位导航设备和车辆状态传感器等,清洁能源动力主要包括电池组和轮毂电机。与传统集中驱动车辆相比,分布式驱动车辆采用轮毂电机直接驱动车辆,省去了变速器、传动轴和差速器等机械部件,减小了整备质量,提高了传动效率。轮毂电机既是执行器又是信息单元,4个车轮的转矩可通过监测电压或电流等参数实时获取,能够为先进的动力学控制反馈系统提供精确的信息,是多执行器协调控制的基础。4个车轮的驱动和制动转矩独立可控,可在不影响纵向性能的条件下通过分配四轮纵向力产生期望横摆力矩,在执行器层面保证了协调控制的灵活性。在进行驱动/制动控制切换时,将机械冲击转化为电磁冲击,提高系统寿命。另外,4个轮毂电机构成动力系统冗余配置,执行器故障时,通过重新分配非故障电机的转矩,可实现容错控制,提高了系统的可靠性[11]。

图1 智能分布式电驱动车辆结构简图
1.2 i-DEV纵向动力学特性
为分析车辆纵向动力学特性,建立车辆纵向动力学仿真系统。首先在Carsim平台上按照车辆的结构参数建立模型,对于无法在Carsim中定义的电机等部件在Simulink中建模,通过Carsim与Simulink联合仿真实现电机与整车模型的连接,如图2所示。图中,afdes为车辆的期望加速度,Tfdes为电机期望转矩,Tf为电机实际转矩,vf和af分别为车辆实际速度和加速度。
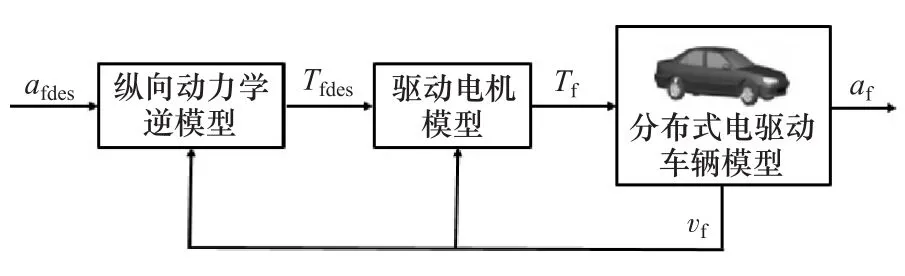
图2 车辆纵向动力学仿真系统
采用频率响应法辨识其输入输出特性,得到传递函数为

式中:af为车辆的实际加速度;afdes为车辆的期望加速度;Kg为系统增益,Kg=1.05;Tg为系统延迟,Tg=0.07s,系统延迟比传统车辆小。
由此可见,智能分布式电驱动车辆由于取消了变速器、差速器等传动系,加之电机自身高动态响应特性,控制实时性较好;而这对其ACC算法的实时性也提出了更高的要求。
2 基于MPC的ACC控制算法设计
2.1 设计目标与系统结构
ACC算法的设计目标是安全、节能和舒适。节能和舒适性目标要求车辆加速度及其变化率都尽可能低,而安全性目标则期望车辆加速度能及时响应前车工况的变化[11]。为解决多目标之间的矛盾,选用具有多目标协调优化、可在线处理约束等优点的MPC理论来设计控制器。MPC的机理可以描述为:在每一采样时刻,根据获得的当前测量信息,在线求解一个有限时域开环优化问题,并将得到的控制序列的第一个元素作用于被控对象,在下一个采样时刻,重复上述过程,即用新的测量值刷新优化问题并重新求解。
基于MPC的ACC系统结构如图3所示。
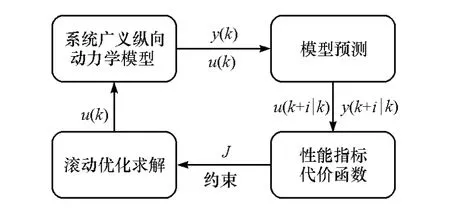
图3 基于MPC的ACC系统结构
图中,k为当前采样时刻,i为预测时间增量。系统广义纵向动力学模型输出系统当前状态y(k);基于预测模型,输出未来时刻状态y(k+i|k)和控制量u(k+i|k),设计综合安全性、经济性、舒适性指标的代价函数J和约束条件,求解预测时域内开环优化问题,将所求控制序列的第一个元素作为控制量输入车辆动力学模型,在下一个采样时刻,重复上述过程。
2.2 系统广义纵向动力学建模
跟车系统广义纵向动力学模型耦合了车辆动力学与车间运动学关系,将车间运动学模型与车辆纵向动力学模型集成,即可建立统一的跟车系统广义纵向动力学模型。
车间运动学关系为

式中:dr和vr分别为两车的相对距离和相对车速;sp和vp分别为前车的位移和速度;sf和vf分别为后车的位移和速度。
综合式(1)和式(2),可得
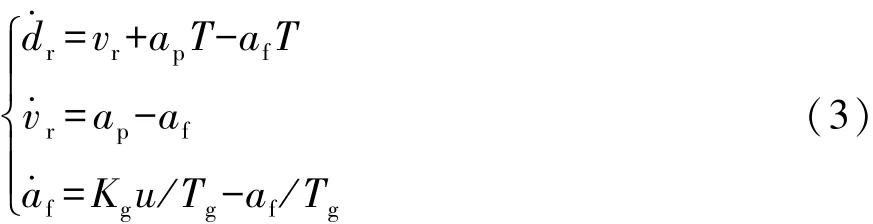
式中:ap和af分别为两车加速度;T为采样步长。
取系统状态变量 x=[dr,vr,af]T,控制变量 u=afdes,建立广义纵向动力学模型:
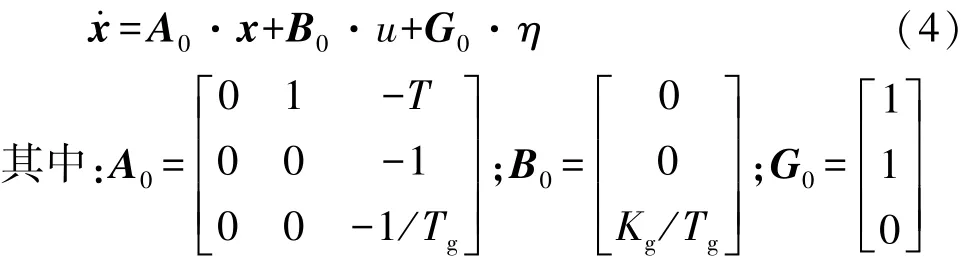
式中:A0,B0和 G0为系数矩阵;η=ap为输入干扰量。
进一步,将式(4)离散化,可得离散化的系统状态空间方程为

其中:A=I+T·A0;B=T·B0;G=T·G0
式中:A,B和G为离散状态方程的系数矩阵;η(k)为当前时刻的输入干扰量。
假定忽略输出干扰,则系统输出为

式中C为输出系数矩阵。
2.3 性能指标的代价函数与约束条件设计
如前所述,ACC算法的设计目标是安全、节能和舒适。实际跟车过程中,驾驶员仅响应较大的跟踪误差,因此采用2范数来量化各指标。安全性指标采用车辆间相对距离误差和速度误差。设wd和wv分别为距离与速度误差的权重系数,则安全性指标为

式中:ddes为期望的安全距离,ddes=τ·vf+d0,τ为安全时距,d0为停车距离。
电动车能耗随加速度增大而增大[6],因此采用加速度量化电动车节能指标。由于ACC系统中自车实际加速度依赖于期望加速度,因此设计节能指标为

舒适性依赖于驾驶员的感受,通常既要符合驾驶员期望车距,也要满足纵向加速度在驾驶员容许范围内,采用对加速度和状态变量设计约束条件的方法:

式中xmin和xmax分别为各参数的最小值和最大值。
综合指标采用线性加权的方法,对各量化的指标求和,得代价函数:

式中:wx2为二次项权重系数;wx1为一次项权重系数;c为常数。
2.4 系统预测问题的优化求解
首先,建立跟车运动的预测模型,假定当前时刻为k,预测时间增量为i,则有

不失一般性,设预测时域长度为P,则

其中:
其次,将预测时域内的代价函数线性加权,转化为预测型,得到

其中:

最后,将式(12)代入式(13),建立预测优化问题的二次规划型,并选用有效集法求解。

其中:φ=2(BPT·WX2·BP+R)

式中Cfinal为常数。
3 控制算法实时性的提升
模型预测控制中,预测时域长度的设置与MPC计算效率和控制最优性相关。分布式电动车辆动态响应较快,仿真步长设置较短,为获得更接近整个时间域的全局最优,须增加预测时域长度。根据式(12)~式(14)可知,预测时域长度P越大,矩阵规模越大,优化求解时的计算复杂度也越大,控制实时性难以保证。为兼顾控制的最优性和实时性,须缩减优化问题规模。
优化问题规模缩减法包括变量集结策略和约束集压缩策略。前者用于减少待优化变量的维数,后者用于减少约束集合的维数。
3.1 变量集结策略
模型预测控制过程中,只有预测时域开环最优序列的首元素作用于被控对象,因此,滚动时域优化求解中,只须保证待优化变量的首元素最优,不求解或少求解其他待优化变量是可行的。这是变量集结策略的基本思路。在本文中的跟车运动预测优化中,假设预测时域长度为P,期望压缩至Q维,则定义一集结变换:

式中:U∈RP为预测控制量;Z∈RQ为集结变量;MT为集结矩阵。MT维数为P×Q,列满秩且矩阵结构满足:
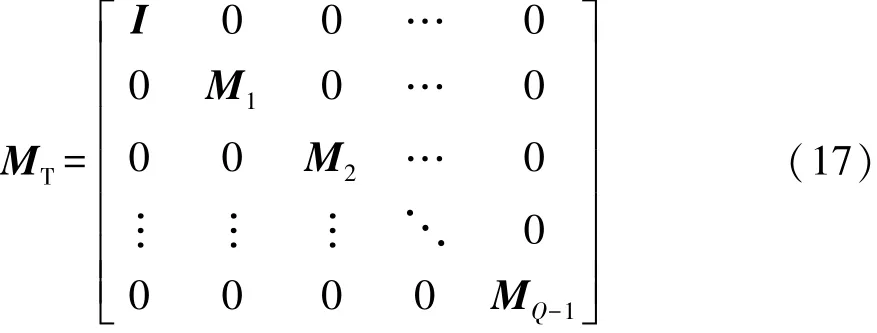
式中:Mj为 qj×1维矩阵,称为第j段列矩阵,=[I … I];qj为各段的长度,满足
由式(16)可知,变量Z的首元素与U首元素相同,利用所求得的Z∗首元素代替U∗首元素进行反馈,同样可获得最优控制输入量。从控制过程看,集结变换前后的最优开环序列是阶梯近似的关系,近似程度取决于各段长度qj,它越小近似程度越高,集结维数Q也越大,根据实际需要合理选择qj值,能够兼顾控制最优性和实时性。
采用套袋法,贮藏前称取肉样的质量为M1,用细线吊起,外面加套一个食品级保鲜袋并封好袋口,肉样不得与保鲜袋内壁接触,于贮藏条件下悬挂24h后,用滤纸吸取肉样表面的水分后,称重肉样的质量为M2,按照以下公式计算贮藏过程中的汁液损失率,每个处理测定3个平行样品。
3.2 约束集压缩策略
模型预测控制过程中,静态优化问题的约束集合也只有首约束对被控对象起限制作用。仅选择部分预测点的控制输入和系统输出进行约束,令其他预测点自由,则可缩减约束集的维数,降低静态优化问题的规模,这是约束集压缩策略的基本思路[12]。在本文中的跟车运动预测优化中,假设预测时域长度为P,期望压缩至Ω维,采用分段选点的方法,构造压缩矩阵:
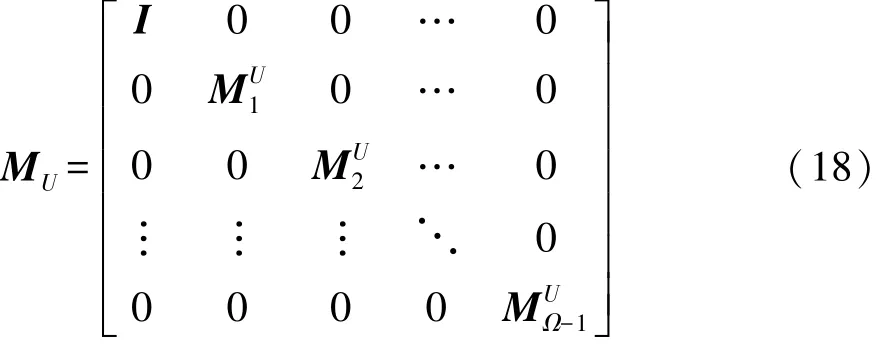
式中:MUj为1×ωj维矩阵,称为第j段行矩阵,=[I,0, …, 0],ωj为各段的长度,满足
压缩矩阵MU中,第j段行矩阵的第一个元素为单位矩阵,其他元素为零。说明经该矩阵映射后,压缩集合第j段的第一个不等式保持原样,其他不等式均变为零不等式,相当于无约束。当然,无约束后可能会影响U首元素求解的最优性,解决该问题的措施就是减小各段的长度ωj,与变量集结策略类似,合理选择 ωj的大小,能够兼顾控制最优性和实时性。
4 系统性能验证
4.1 基于CarSim/Simulink联合仿真试验
搭建基于CarSim/Simulink的联合仿真平台见图4。车辆主要参数见表1,电机功率分布见图5。
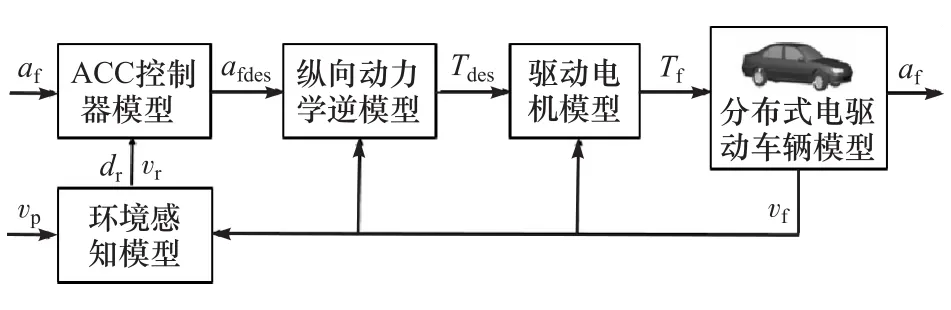
图4 Simulink/CarSim联合仿真平台框架
对比算法选用工程中常用的经典PID算法,以距离误差为反馈输入,通过调整PID参数,获得较好的性能。前车工况采用ISUZU ACC城市循环工况,由于原ISUZU城市循环工况包含车速为0的车辆起停过程,而一般ACC要求车速在20km/h以上,基于原循环工况特征,将最低车速提高,重新设计城市循环工况,如图6所示。
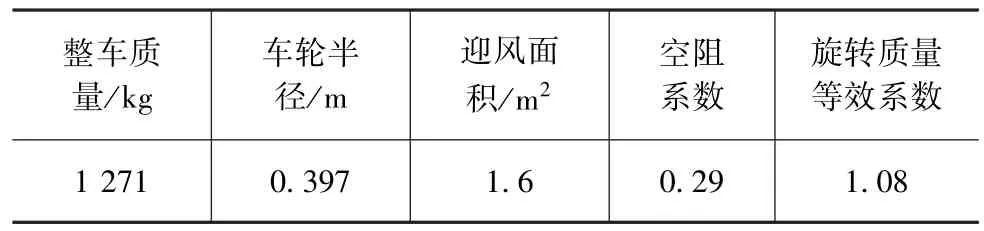
表1 车辆主要参数
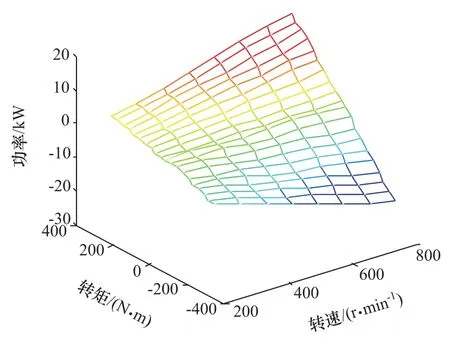
图5 电机功率分布图
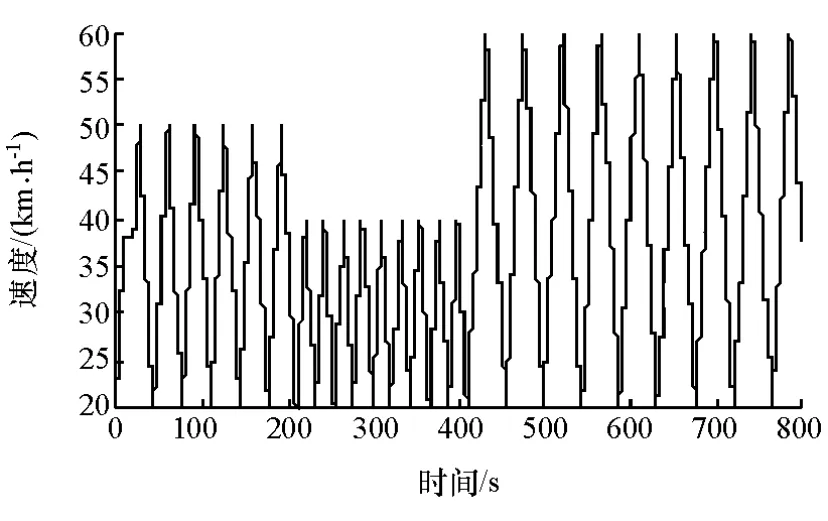
图6 前车工况
初始时刻自车车速为18km/h,两车相对距离18m,以最大距离误差Δd、最大速度误差Δv和总能耗E为指标,MPC算法采用平均分段压缩优化变量和约束集的规模缩减策略,取缩减维数Q=Ω,预测时域P=200。取不同的Q,缩减前后的对比结果见表2。
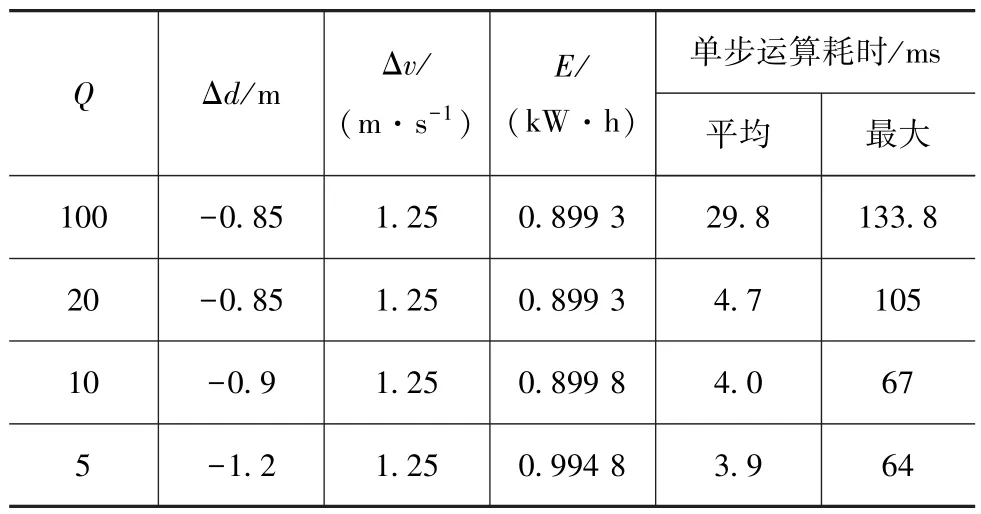
表2 规模缩减前后的对比结果
由表2可以看出,单步运算耗时跟缩减维数Q密切相关,但Q<20时,控制性能下降较多,而运算效率提高并不明显。因此,合理选择Q能使规模缩减后的MPC运算效率提高,控制最优性几乎不受影响。根据实时性要求,并兼顾控制最优性,选择Q=20为最终的缩减维数。
MPC控制器与PID控制器对比结果见图7和表3。
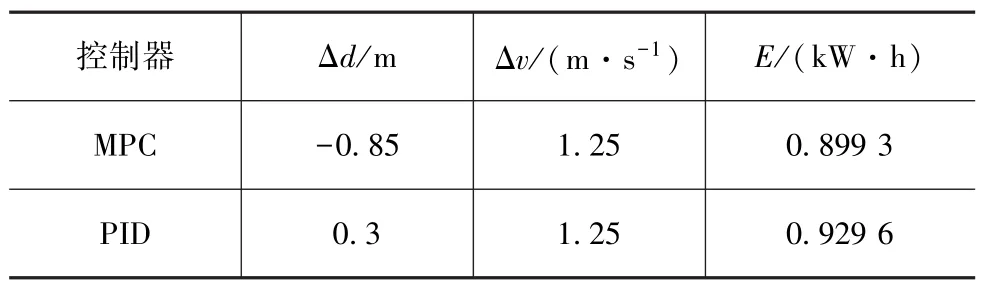
表3 MPC与PID的仿真结果对比
由图7和表3可见:PID控制器由于采用了距离误差为反馈输入,跟车距离误差较小。MPC控制器因在滚动优化求解时协同优化了加速度的大小,加速时功率相对较小,因此在保持安全距离的同时,能耗更小。
仿真结果表明:相对于PID控制器,MPC控制器因设计控制目标时考虑了节能指标,故在保证安全跟车的同时,表现出更加节能,整个工况下节能3.2%。
4.2 基于驾驶模拟器的硬件在环试验
在仿真验证基础上,采用动态模拟驾驶器作为试验平台,如图8所示。以动态驾驶舱模拟实际车辆,以场景模拟系统模拟真实道路行驶环境,以Car-Sim/Simulink作为动力学控制平台,验证控制效果。
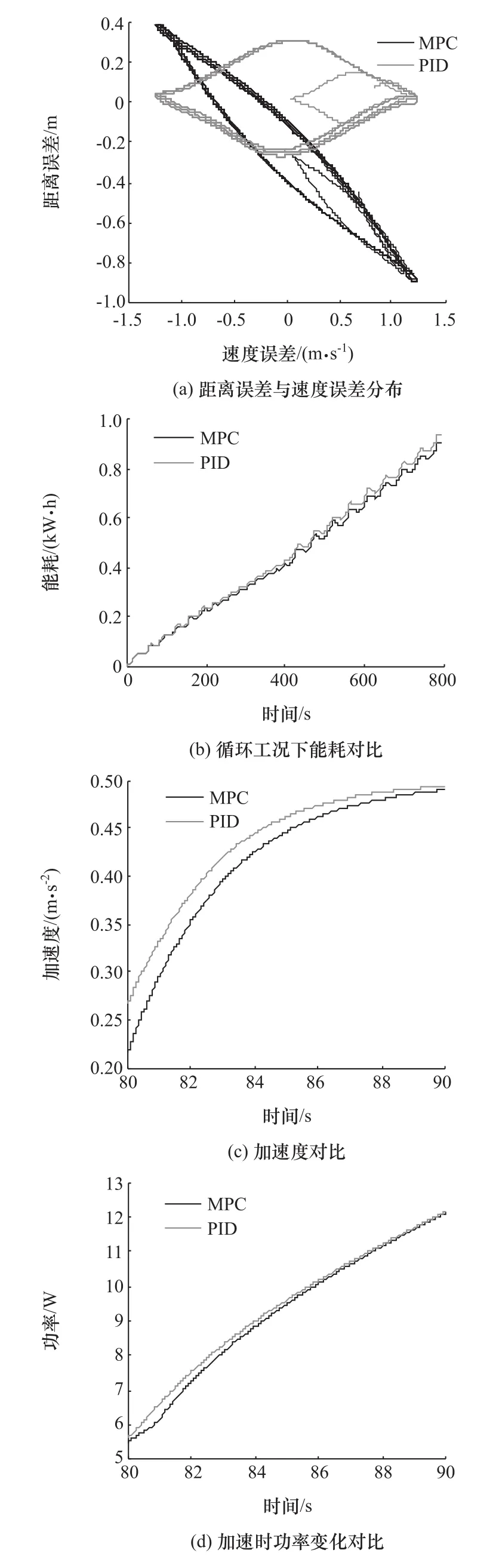
图7 仿真试验对比结果

图8 动态模拟驾驶试验台
前车工况与仿真时所采用的工况一致,初始时刻自车车速为18km/h,两车相对距离18m。MPC控制器与PID控制器试验对比结果见图9和表4。
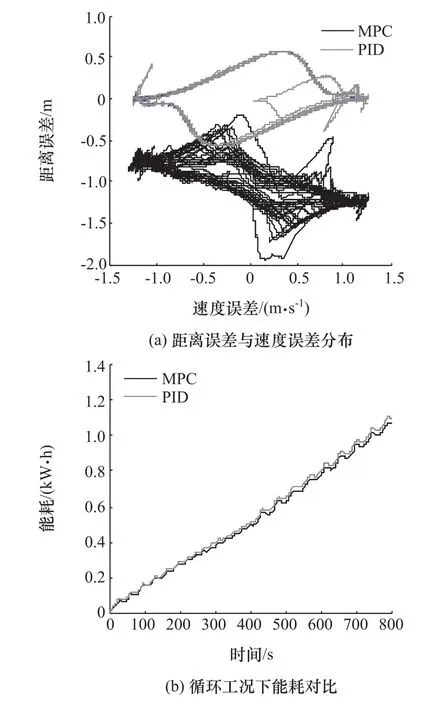
图9 硬件在环试验结果对比
由图9和表4可见:MPC控制器和PID控制器均能使跟车的距离误差和速度误差保持在较小范围内,其中MPC控制器的能耗较小。两者相比,在整个循环工况下,MPC控制器节能2.7%。
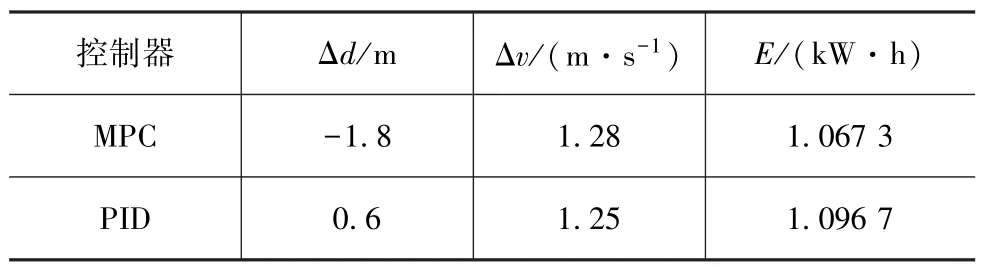
表4 MPC与PID的试验结果对比
试验结果同样表明,所设计的控制器能通过优化加速度的变化,达到节能效果,同时保证了安全跟车,实现整车安全与节能的协同优化。
5 结论
基于智能分布式电驱动车辆纵向动力学特性分析与辨识,采用模型预测控制的方法,设计了一种能兼顾安全和节能等多目标的车辆自适应巡航控制算法。针对控制实时性的需要,采用缩减优化问题规模的方法对算法进行了改进。设计对比控制器,分别采用联合仿真和硬件在环试验,验证了系统性能,得出如下结论。
(1)基于MPC理论设计的分布式电动车ACC算法,能在保证安全跟车的前提下,通过优化加速度的变化,达到节能效果。仿真和试验结果均表明,算法实现了分布式电驱动车辆安全和节能的协同优化。
(2)基于规模缩减法的MPC快速算法,能通过压缩矩阵规模缩短优化问题单步计算时间,提升计算效率,在兼顾最优性的同时,保证了控制的实时性。
猜你喜欢
电声技术(2022年7期)2022-09-23
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
科技视界(2020年24期)2020-08-26
科技视界(2020年22期)2020-08-14
宇航计测技术(2019年1期)2019-03-25
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
中学物理·高中(2016年8期)2016-08-08
