自动跟踪定位射流灭火系统设计
2018-07-23 01:08张武坤
石家庄职业技术学院学报 2018年4期
张 武 坤
(石家庄职业技术学院 机电工程系,河北 石家庄 050081)
随着经济的发展,大体量建筑、高大空间建筑和带有高大空间场所建筑的涌现,给建筑消防带来了一定的难题,特别是近几年重特大事故的频发引起了国家有关部门的极大关注.为了保护生命财产的安全,自主探测并定位大空间内早期火灾逐渐成为消防科技工作者关注的课题之一,自动跟踪定位射流灭火系统是目前研究的热点.本文主要针对自动跟踪定位射流灭火系统的软、硬件系统设计进行了分析.
1 自动跟踪定位射流灭火系统简介
自动跟踪定位射流灭火系统是利用三波段红外和视频图像复合型火焰探测器,对被监测区域火焰的红外特征、现场采集的视频图像的形态变化进行综合分析处理,运用自动控制方式来实现灭火的各种室内外固定射流灭火系统.自动跟踪定位射流灭火装备与电磁(动)阀、信号阀、水流指示器等组件以及管道、供水设施、控制设备组成自动灭火系统.通过此火焰探测器,自动跟踪定位射流灭火系统对保护场所的火灾信号进行实时采集,报警单元先对采集的数据进行分析和逻辑判断,判断是否发生火灾,如未发生火灾,系统自动进入信号采集状态;如发生火灾,则报警单元向消防控制中心报警,并向消防控制柜和其他联动装置发出指令,启动消防水泵,完成水柱、喷雾、电机水平回转、俯仰转动等动作,精确灭火直至不再复燃.自动跟踪定位射流灭火系统结构如图1所示.
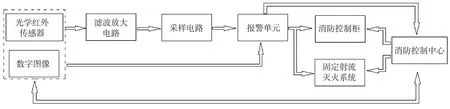
图1 自动跟踪定位射流灭火系统结构
2 视频图像复合型火焰探测器工作原理
自动跟踪定位射流灭火系统的关键构件为视频图像复合型火焰探测器,其采用三个波长不同的光学红外传感器来识别火焰.其中,一个作为检测火焰特有红外波长的红外传感器,另外两个探测背景红外辐射,这样以有效提高红外火焰探测器的灵敏度,降低误报率.由于传感器输出信号弱,输出阻抗大,所以每个传感器通过专用通道进行滤波放大,转换成数字信号传递到报警单元.图像采集系统不断采集现场图像,将其作为基准图像数据库,并不断刷新,以确保火灾发生前后背景图像的一致性.报警单元接到红外探测器的报警信号后,将报警信号和摄像机现场采集的图像信息直接传送到消防控制室,方便监控人员通过视频监控查看报警点位影像信息,对现场火情有更直观、准确的判断和了解;同时启动图像处理软件,通过比较火灾发生前后环境像素点灰度值的变化确定火灾发生区域,计算确定火灾区域在三维空间的坐标,为定位射流系统提供参数[1].图像处理流程如图2所示.
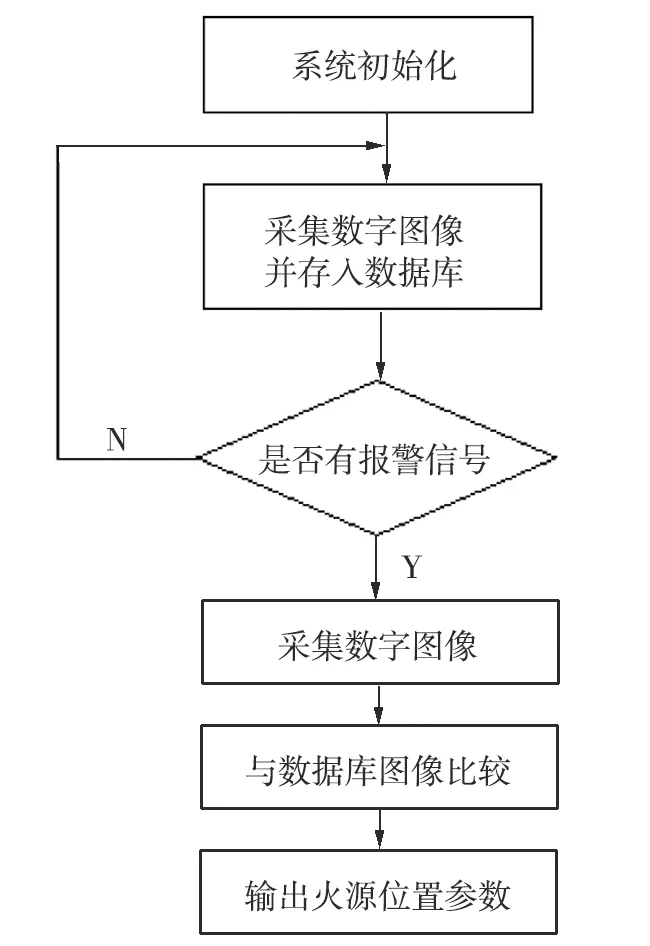
图2 图像处理流程
3 灭火系统的硬件设计
灭火系统硬件设计电路结构框图见图3.
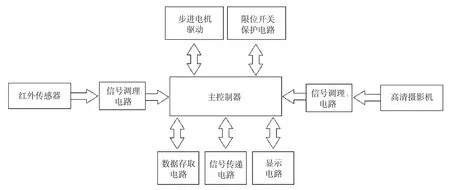
图3 灭火系统硬件设计电路结构框图
火灾发生后,报警单元内部的主控制器根据火源位置计算出水平和垂直方向步进电机的旋转角度,转换成脉冲信号输出到驱动电路,控制电机的转角、速度和正反向,使其带动喷头水平方向可旋转0°~360°,垂直方向俯仰旋转-90°~0°.为了保护电机设置限位开关保护电路,每台灭火装置都设置上、下、左、右四个限位开关.当旋转到极限位置时,触碰限位开关,步进电机停止旋转.主控制器通过信号传递电路可将控制信号传送到消防控制柜,启动水泵,打开电磁阀门,管路充水.为了防止复燃,灭火结束后人工停止水泵.数据存取电路存放火灾发生前后的图像信息和各种设备的状态信息、红外传感器的脉冲阈值、角度修正值、水平和俯仰步进电机的脉冲值等.信号传递电路负责主控制器与水泵、电磁阀、雨淋阀之间控制信号和状态信息的传递.
4 灭火系统的软件设计
灭火系统软件主要包括主程序、图像采集处理程序、显示程序和信号传递程序.主程序是全部程序的核心,主要负责子程序调用.显示程序显示水平和垂直步进电机的位置数据和水泵、电磁阀、雨淋阀等灭火设施的状态.信号传递程序将控制信号传送到控制柜,进而控制水泵、电磁阀、雨淋阀,并将这些设施的状态传送到主控制器中[2].系统软件程序流程如图4所示.
在大空间建筑场所采用红外和图像复合探测技术实时监测,能进行多种火灾的识别;火灾初期自动跟踪喷水灭火并联动声光报警、防排烟等,并将火场实时图像传送到消防控制室,具有报警及时、准确,保护面积大,报警响应速度快,灵敏度高,可靠性高的特性;降低了工作人员的劳动强度,增大了消防安全保障系数.
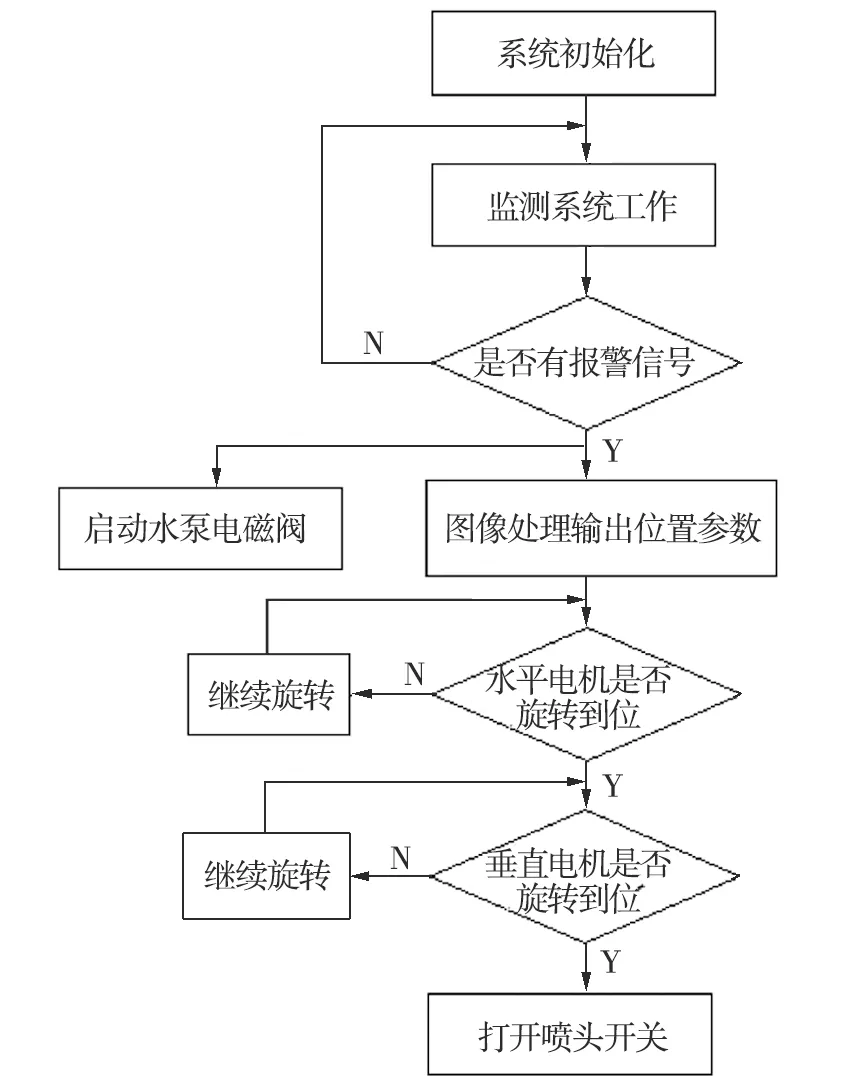
图4 灭火系统软件程序流程
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
铁道通信信号(2018年5期)2018-06-28
光学精密工程(2016年3期)2016-11-07
汽车维护与修理(2016年10期)2016-07-10
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28