无人机零长发射分离安全性分析
2018-07-18 07:07毛端华朱利媛林海彬
教练机 2018年2期
毛端华,朱利媛,蔡 景,林海彬
(1.航空工业洪都,江西 南昌,330024;2.南京航空航天大学民航学院,江苏南京211106)
0 引言
在军事用途中,无人机无论在侦查打击、评估导弹损伤,还是在争夺制空权上都将成为战争主角之一。在民用领域,无人机已广泛应用于救援、勘探、搜集数据等活动中。在该背景下,要求便捷、可靠的发射技术与之匹配来提高无人机应用效能。对于翼展较小的无人机多采用轨道式发射和零长发射,翼展较大的无人机多采用起落架跑道起飞方式和母机空中投射方式。无论哪种发射方式,都需结合应用背景,提高无人机发射的机动能力和生存能力[1]。
助推零长发射是一种难度高,影响因素多的发射方式。通过发射架提供支撑,无人机在助推器和发动机推力共同作用下,使无人机离开发射架,达到一定高度和速度后,导航控制系统介入控制无人机姿态。该发射方式可以实现车载,舰载,不需要阵地、机场和跑道等特定配套设施装置,发射方式灵活便捷,机动性强。
无人机与发射架分离过程是无人机生命历程最复杂的阶段之一,是无人机发射关键技术。在发射过程中要求发射架机构能正常工作,无人机与发射架不产生非设计碰撞等负面影响,无人机与发射架能安全分离。针对无人机发射分离瞬间,研究了某型无人机助推零长发射分离闭锁力,释放剪切力,发射分离过程无人机与发射架的安全距离,对发射分离过程进行动力学仿真,并与靶试结果对比,验证无人机零长发射的可行性与安全性。
1 零长发射关键因素
1.1 闭锁力分析
某型无人机在倾斜翻转发射架零长发射时,无人机接到发射指令后,助推器和发动机同时工作,在助推力和发动机推力作用下,为防止无人机离开发射架瞬间,由于无人机重力作用或发射支撑点受力不平衡导致无人机下沉造成初始偏差或低头、抬头过大导致无人机不能正常发射,所以设计有闭锁释放机构。
闭锁释放机构在推力值未达到某一确定释放力数值前,无人机与发射架之间无相对运动。初始阶段助推器推力-时间曲线为类正弦函数曲线,助推力随时间增加而增大。当助推器推力达到一定值,闭锁释放机构工作。无人机连同助推器一同离开发射架,无人机达到一定高度和速度后,导航控制系统介入控制无人机姿态。助推器工作完成后,由于自身重力离开无人机。
无人机发射分离瞬间受力如图1所示,一般设计助推推力、发动机推力在垂直方向上的分力大于无人机重力与助推器的重力之和时,闭锁释放机构将无人机解锁,实现无人机零长发射。

该时刻作用在机体轴线合力为FH,剪切销剪断。其中:α为发射角;β为助推器推力线与无人机机身轴线夹角;G1为无人机的重力;G2为助推器的重力;Fz为发动机推力;FF为助推器推力。
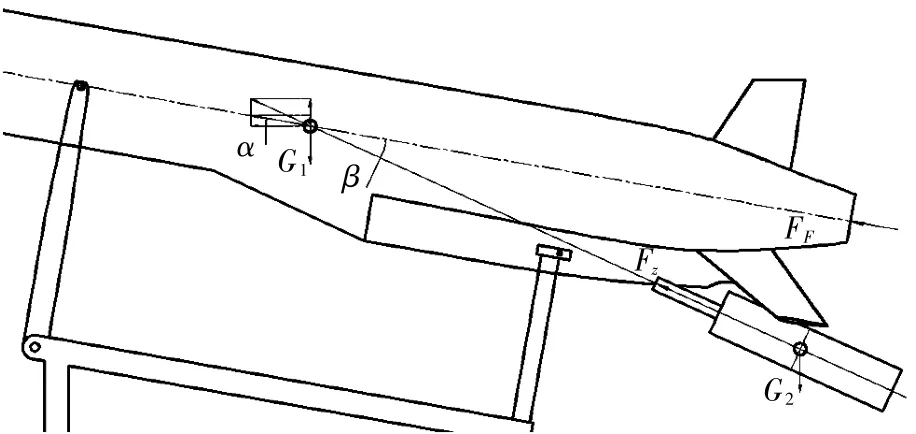
图1 无人机分离时刻受力模型
1.2 释放机构分析
发射系统采用闭锁装置的形式有摩擦式闭锁装置、弹簧式闭锁装置、拉杆式闭锁装置和剪切销式闭锁装置[2]。采用剪切销剪断是闭锁释放是一种结构简单可靠的形式,在发射时无需人工干涉。
根据发射架实际结构形式,闭锁释放装置一般布置在发射架上或者布置在无人机与发射架连接部位。当剪切削位于无人机与发射架连接部位上,且通过作用力合力线时,剪切销解锁力Fj=FH,当剪切削位于发射架上,剪切销解锁力Fj=(FH×L1)/L2,式中L1为机体与翻转支架作用点到翻转支架转轴的距离,L2为闭锁释放机构剪切销轴线到翻转支架转轴的距离。剪切销设计尺寸与安装孔尺寸间隙要合理,避免前切削在剪断过程中承受附加的正应力,忽略加载速率对抗剪强度影响,剪切销剪切力公式(2) 计算

其中K为拉剪系数,一般对于退火钢及强度不高碳钢(≤700MPa),K 为 0.7,中强度钢(800~1200MPa),K为 0.63~0.65,高等强度钢(≥1200MPa),K 为 0.6,即三个强度阶段剪应力分别按 τb=0.7σb,σb=(0.63~0.65)σb,σb=0.6σb进行评估[3],D 为剪切销直径。
选定同一批次加工的剪切销,随机抽取20样件进行剪切试验,测试剪切销剪断时作用力数据如下,剪切销解锁力Fj最大上偏差为设计值×(1+3.38%),解锁力Fj最大下偏差为设计值×(1-4.94%),分布数据如下图2所示。
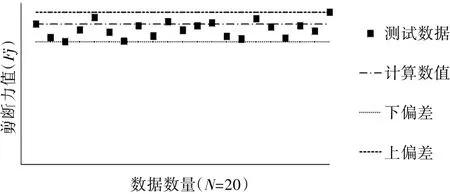
图2 剪切销测试数据分布
1.3 安全距离分析
闭锁机构中的剪切销剪断后,在助推器和发动机推力作用下,机体向上方运动。在无人机发射与发射架分离过程中,无人机侧向不进行控制。由于分离高度较低及分离时间在很小时间段,忽略风载荷和气动载荷对无人机影响。
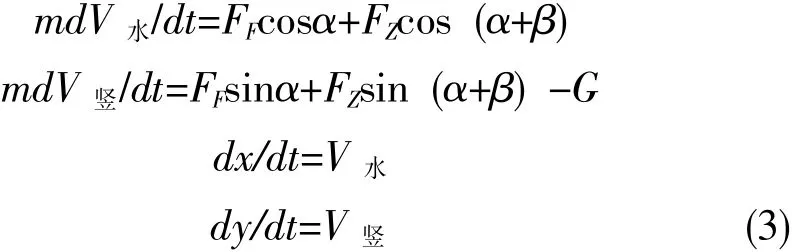
假设无人机的对称面始终与局部地表相互垂直的平面重合,且认为无人机质心运动不偏离该平面,在该假设条件下,其偏航角,滚动角,方向舵偏角,副翼偏角绕机身坐标系弯矩Mx,My,Mz,角速度wx,wy,wz等于零,假设推力与无人机轴线一致,则可得到无人机在垂直平面运动方程组。助推器工作时间t一定,那么通过迭代法可以求得无人机在发射分离过程中的飞行高度和水平距离[4]。取无人机质心为原点,建立大地坐标系,无人机力学方程为:
2 仿真模型
利用虚拟样机技术(VPT)建立发射系统动力学模型,常用的虚拟软件有ADAMS,DADS,SIMPACK,由于ADAMS使用交互式图形环境,求解器采用多刚体系统动力学模型中的拉格朗日方程法,可方便输出速度、加速度、位移、碰撞接触力等结果[5-6]。本文采用ADAMS软件对无人机零长发射动力学仿真分析。
2.1 仿真建模
对发射架和无人机仿真模型通过xmt_txt文件导入ADAMS软件,并按照真实结构建立接触关系,在无人机模型和大地(ground)建立Marker测量点,进行发射分离安全距离测量。闭锁释放机构建模时,对关键部件剪切销建立固连副,对剪切销受剪力进行传感器监控,建立传感器失效模型,当剪切销受剪力达到解锁力设计值时,对应的剪切销固定副失效。并添加继续仿真语句(SIMULATE/DYNAMIC,END=仿真时间,STEPS=仿真计算步骤)。
2.2 载荷施加
外力载荷主要分为发动机推力载荷,随时间变化的助推器推力载荷,发射架重力载荷,无人机与助推器重力载荷。加载发动机推力时,由于发动机推力值相对于助推器最大推力值较小,加载发动机推力达到稳定时的载荷值,加载载荷值为常数。助推器加载载荷值为非常数,推力载荷值随时间增加而增大,达到峰值后保持一段时间后,推力值逐渐减小。助推器测量载荷值采样频率较高,对作用力与时间关系的实测数据保存成.txt文件,通过创建名为SPLINE_1函数导入模型中。通过拟合法Cubic Fitting Method施加载荷,具体表达式为CUBSPL(time,0,SPLINE_1,0)。
3 仿真与靶试结果分析
3.1 仿真结果
利用上述建立无人机零长发射动力学模型,分别对设计质心偏心,推力线偏心,推力局部变形偏心三种偏心上下包络值分别计算,仿真结果显示无人机能正常与发射架分离,通过多组偏心工况、发射角度、摩擦系数设置、释放机构剪切力材料分散性偏差值进行组合,得到了无人机发射分离相关参数。
对靶试发射工况进行参数设置,完成发射分离动力学仿真,得到无人机和助推器与发射架分离的高度和水平距离。图3、图4给出无人机在发射架发射到离开发射架安全距离仿真曲线。
图3为无人机和助推器一起向前运动,助推器末端与发射架末端在X方向重合该时刻点,无人机与发射架分离姿态和分离距离,其中图中左侧描述为助推器运动到发射架底座最右侧位置,图中右侧曲线数据描述助推器测量点与发射架上测量点在大地坐标系下分别为X方向(水平向前),Y方向(垂直向上),Z方向(侧向)安全距离,测量值X方向为5.3mm时,在Y向助推器末下端与发射架高度值为190.0mm,侧向距离为7.2mm。
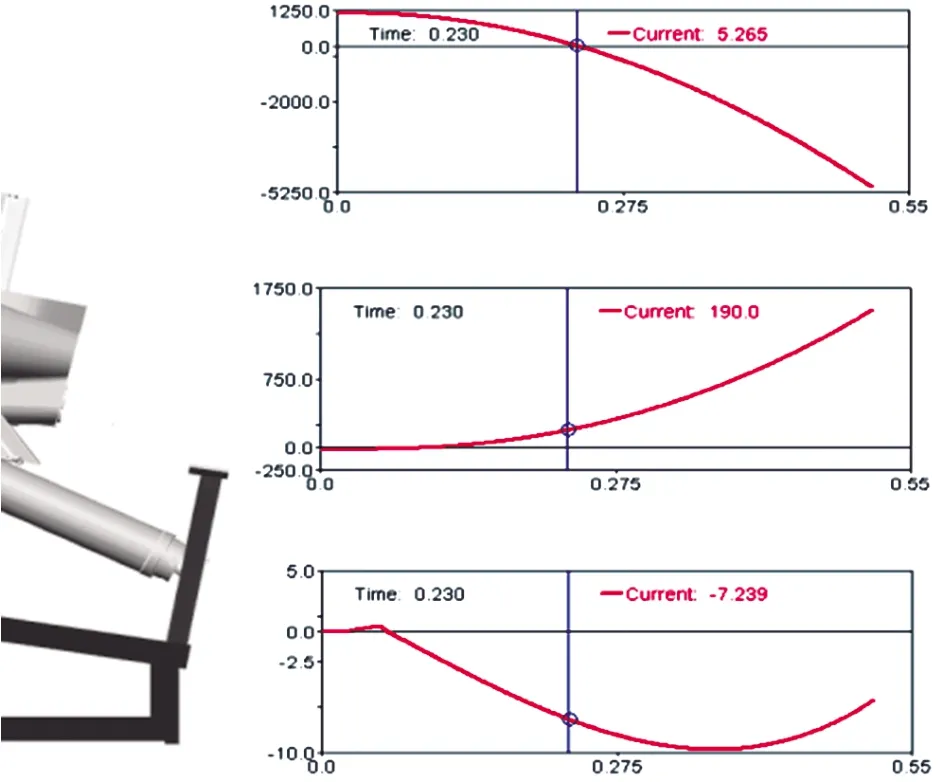
图3 分离时刻点1分离距离
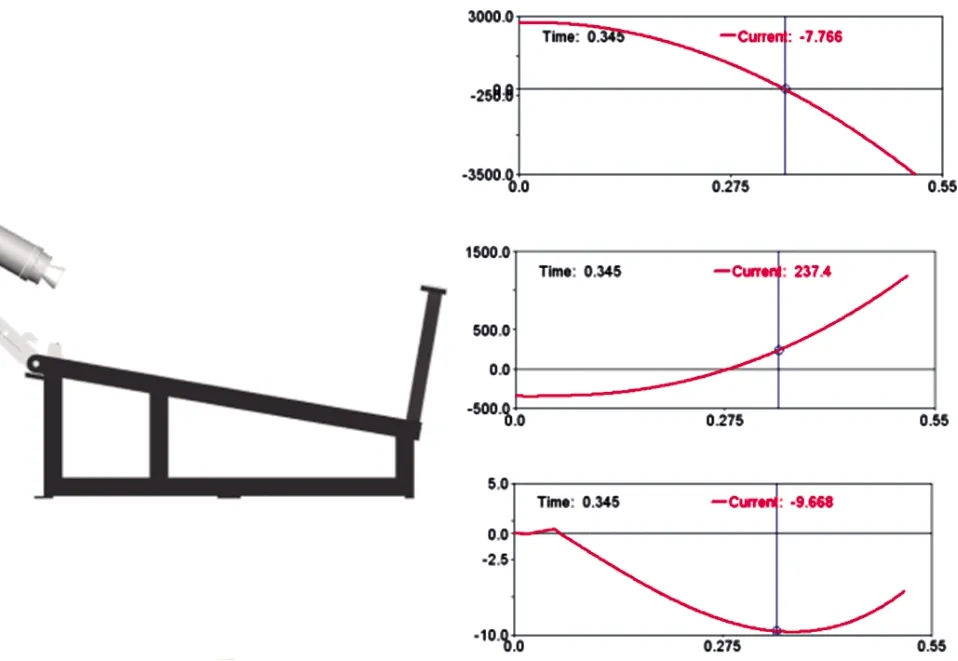
图4 分离时刻点2分离距离
图4为无人机和助推器一起向前运动,助推器末端与发射架前端在X方向重合该时刻点,无人机与发射架分离姿态和分离距离,其中图中左侧描述为助推器运动到发射架底座最右侧位置,图中右侧曲线数据描述助推器测量点与发射架上测量点在大地坐标系下三个方向分别为X方向(水平向前),Y方向(垂直向上),Z方向(侧向)安全距离,当助推器运动到发射架右端时,X方向测量值为-7.7mm时,在Y向助推器末下端与发射架高度值为237.4mm,Z方向距离为9.7mm。
3.2 靶试结果
对无人机进行靶试试验,通过高速摄像、遥测数据采集无人机运动高度和姿态等数据。图5给出了无人机靶试高速摄影和动力学仿真过程,时刻点1为X方向上助推器末端运动到发射架末端该时刻点。从图中可以看出无人机运动轨迹和相对于发射架的分离距离,发射架翻转支撑翻转角度与仿真轨迹近似一致,通过图像处理,靶试与仿真的角度偏差约为0.86°,发射分离高度与仿真结果一致。
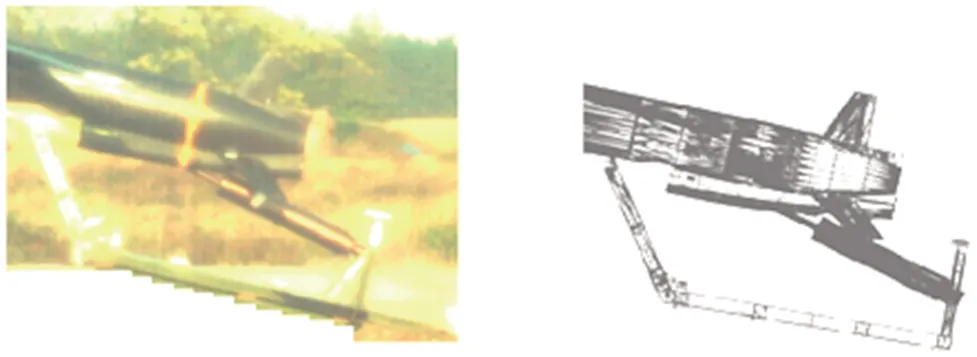
图5 分离时刻点1分离距离
图6给出了时刻点2,在X方向上助推器末端运动到发射架前端时分离姿态和高度。从图中可以看出无人机运动轨迹且相对于发射架的分离距离,发射架前翻转支撑翻转角度与动力学仿真轨迹近似一致,通过图像处理,靶试与仿真的角度偏差约为2.77°,仿真结果翻转角度大于靶试翻转角度结果,发射分离高度与仿真结果一致。

图6 分离时刻点2分离距离
4 结论
本文对某型无人机零长发射分离的安全性进行了仿真,对影响无人机安全发射分离的各种因素进行了分析,并得到了主要结论。
1) 闭锁释放力是无人机发射分离的关键因素,通过无人机和助推器重力、助推器推力、发射角度等可确定闭锁力。对闭锁装置剪切销进行了理论计算和试验,通过试验确定在释放力偏差在±5%以内,在该偏差内进行动力学仿真,无人机可与发射架安全分离。
2) 仿真结果显示,在设计偏心工况组合下,无人机均可实现安全分离,相对无偏心仿真结果,推力线偏心略大于重力偏心结果。该现象由于推力点与质心点相对距离较大,无人机实际转动惯量偏小引起,在实际发射过程需考虑助推器与机体连接部位局部变形引起偏心。
3) 仿真结果与靶试结果显示,助推器推力作用下机体向前运动,助推器运动到翻转机构位置时,安全距离较短。发射环境温度高于30℃时,助推器推力相对与靶试试验助推器推力增加,导致无人机分离速度与加速度增大而导致翻转机构反应相对过慢,可能与前翻转机构干涉碰撞。翻转机构应增加翻转力装置和到位缓冲装置。
4) 靶试结果显示,无人机与发射架安全分离。对无人机与发射架分离姿态、安全距离,靶试高速摄像结果与动力学仿真结果基本一致,仿真结果与靶试结果均验证了某型无人机零长发射的可行性和安全性。
猜你喜欢
测井技术(2022年3期)2022-11-25
发明与创新(2022年28期)2022-11-22
力学与实践(2022年3期)2022-07-02
军事文摘(2021年16期)2021-11-05
今日自动化(2021年2期)2021-10-14
航空发动机(2020年3期)2020-07-24
故事作文·高年级(2018年8期)2018-08-14
快乐语文(2018年7期)2018-05-25
小朋友·快乐手工(2017年8期)2017-08-10
人生十六七(2015年5期)2015-02-28