
由Apollonius圆引出的一个轨迹问题及其对偶
2018-07-16 00:34吴波向霞
数学通报 2018年5期
吴 波 向 霞
(重庆市长寿龙溪中学 401249)
1 由Apollonius圆引出的轨迹问题
定义1[1]如图1,到平面上两定点A、B的距离之比为定值λ(λ≠1)的动点P的轨迹是一个圆,此圆叫做Apollonius圆.
若λ=1,此轨迹是线段AB的垂直平分线.如将直线看作是半径为无穷大的圆,也可以允许λ=1.
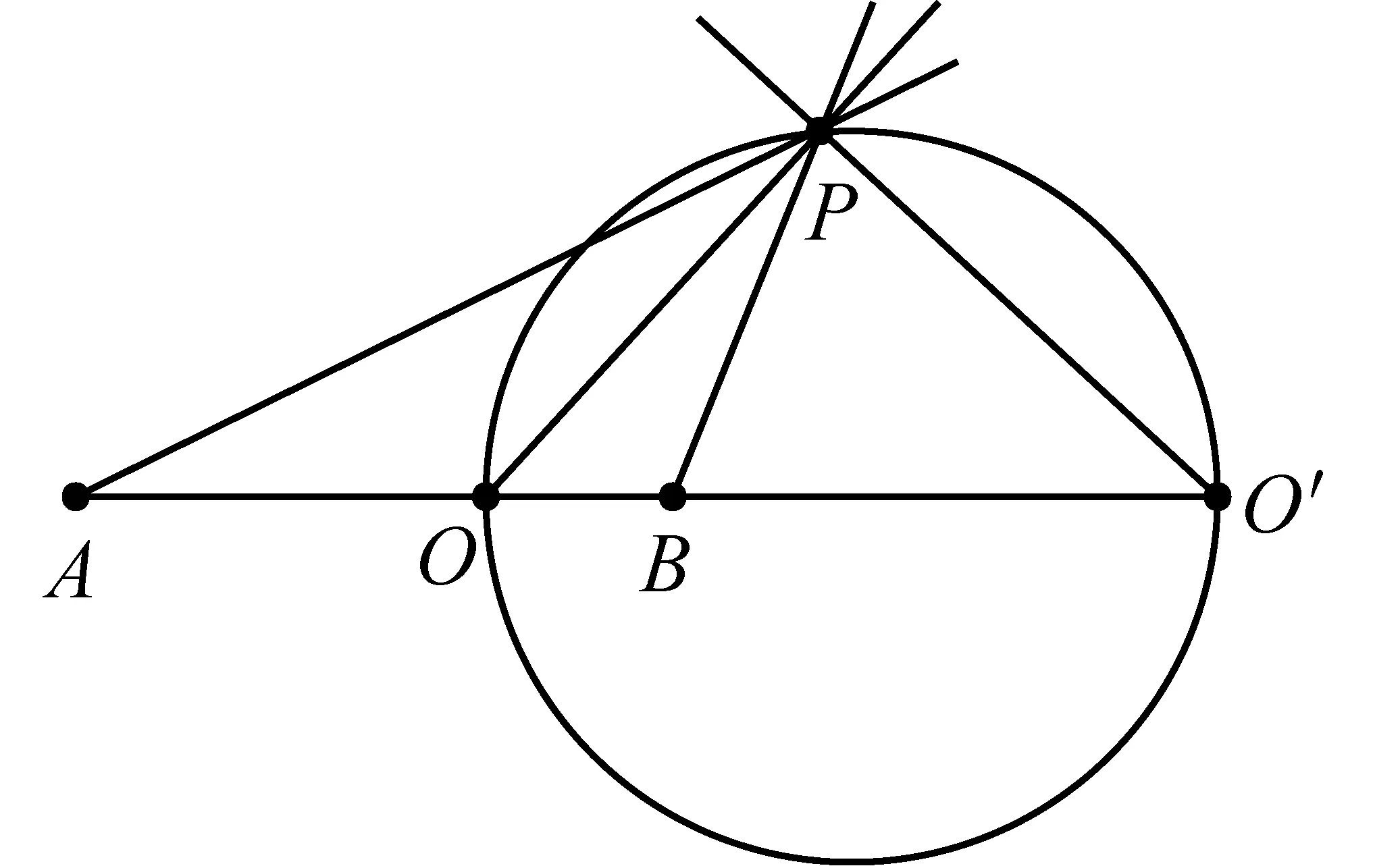
图1
Apollonius圆在高考和自主招生考试中都曾出现,已经有很多文章讨论过它的应用.而我们则注意到如下事实:
如图1,由定义1所确定的Apollonius圆交直线AB于点O、O′,则对圆上的动点P有:|PA|∶|PB|=|OA|∶|OB|=λ,从而PO平分∠APB.同理有:PO′平分∠APB的邻补角.
由此我们想到:能否将定义1中的轨迹改为如下表述形式呢?
如图1,A、B、O(或O′)为共线的三定点.求使得直线PA、PB关于直线PO(或PO′)对称的动点P的轨迹 (约定:动点P取A、B、O(或O′)时也符合条件).
不过,稍加分析就可发现:按上面这种形式表述的轨迹与定义1中的并不相同.因为除Apollonius圆上的点外,新形式表述中的轨迹还包含直线AB上的点.
但按这种新的方式重新表述之后,若A、B、O为平面上的任意三个定点,则引出如下问题:
问题1设A、B、O为平面上的三个定点.求使得直线PA、PB关于直线PO对称的动点P的轨迹.
本文拟解决这个问题并探讨与其对偶的问题.
2 分析与作图
如图2,对平面上三定点A、B、O,假设点P满足问题1条件“直线PA、PB关于直线PO对称”.作点A关于直线PO的对称点A′,则A′在直线PB上.反过来,点P是直线BA′与直线PO的交点.
由此,我们就可以作出点P的轨迹.具体地说,作法如下:
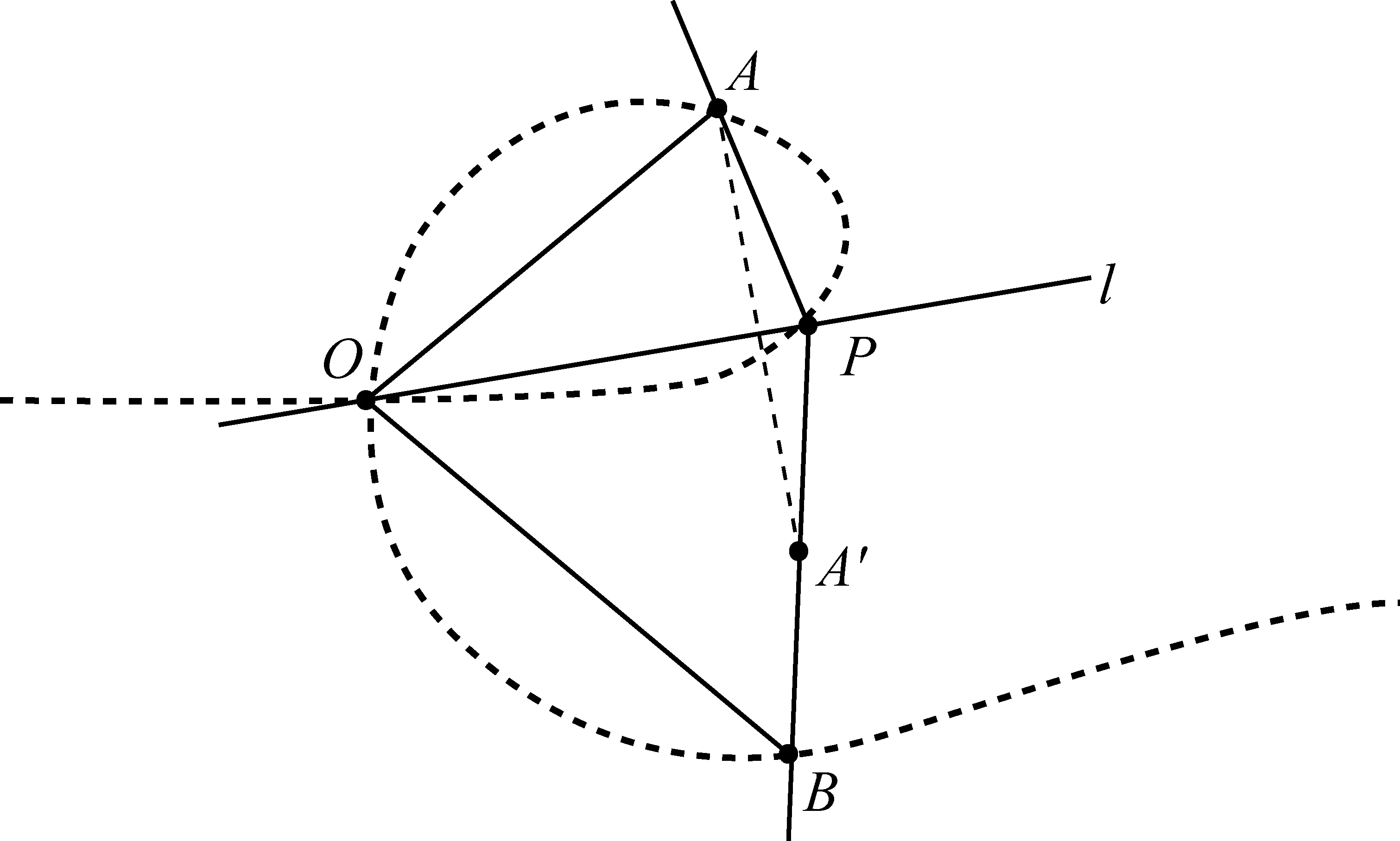
图2
步骤1如图2,过点O任作一直线l.作点A关于直线l的对称点A′.
步骤2作直线BA′,直线BA′与l相交于点P.
步骤3让直线l绕点O旋转,即可得动点P的轨迹.
当三定点A、B、O的位置关系如图2所示时,点P的轨迹曲线有一个结点O,曲线的形状非常像字母“e”.
如图2,当动直线l经过定点A时,A与A′重合.直线BA′是确定的,它与直线l的交点P即是A,因此直线PA无法确定.当动直线l经过定点B时直线PB无法确定.类似地,当P与O重合时,直线PO无法确定.
对上述三种情形,如图2,为保证轨迹曲线的完整性,对问题1我们补充约定:当动点P取A、B、O时也符合问题1的条件——即轨迹中含点A、B、O.
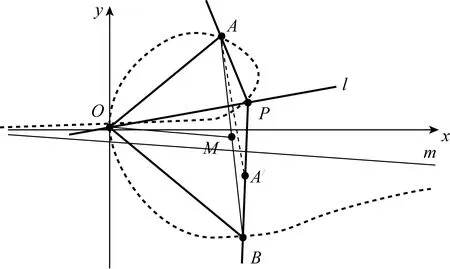
图3
3 轨迹方程
如图3,设│OA│=a,│OB│=b,∠AOB=2θ(其中a,b>0,θ∈[0° ,90° ]且A、B不重合).
以O为原点,以∠AOB的平分线所在的直线为x轴,其邻补角的平分线所在的直线为y轴建立平面直角坐标系.则A(acosθ,asinθ),B(bcosθ,-bsinθ).
设绕点O旋转的动直线l的倾斜角为α,则l的方程为xsinα-ycosα=0.
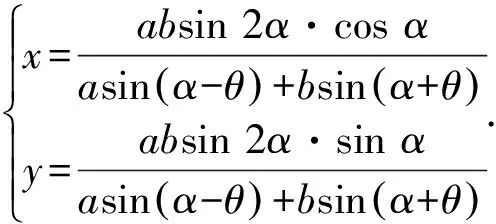
则A关于l的对称点A′的坐标为
(acos (2α-θ),asin (2α-θ)).
则BA′的方程为
(x-bcosθ)(asin (2α-θ)+bsinθ)
=(y+bsinθ)(acos (2α-θ)-bcosθ).
对照组:常规术后护理方法。术后,协助患者进行日常的生活活动,及时观察患者手术部位的伤口愈合恢复情况,指导患者多食用营养丰富的食物等。
下面我们消去其中的参数α.
注意到参数方程中的分母
asin (α-θ)+bsin (α+θ)
=(a+b)sinαcosθ-(a-b)cosαsinθ.
则参数方程中第一式去分母可得
[(a+b)sinαcosθ-(a-b)cosαsinθ]x
=absin 2αcosα.
(1)当α≠90° 时,上式化简为
[(a+b)tanαcosθ-(a-b)sinθ]x=absin 2α.
①
代入①式化简即得
(x2+y2)[x(a-b)sinθ-y(a+b)cosθ]+2abxy
=0.
②
(2)当α=90° 时,由参数方程得P的坐标为(0,0),仍满足上式.
又,在某些特殊情形下点A′会与B重合,或者直线BA′会与l重合(见下面分析中的第(i)、(iii)、(iv)款),但易知,这些情形下的轨迹方程仍为②式.
综上,方程②就是点P的轨迹方程.下面对此轨迹方程略作分析.
(i)若θ=0° 且a≠b,即点O在线段AB(或BA)延长线上时,由方程②知此时点P的轨迹方程退化为:直线y=0和圆(a+b)(x2+y2)-2abx=0.前者即直线AB,后者即是Apollonius圆.
(ii)若θ=90° 且a≠b,即点O在线段AB上但不是其中点时,由方程②知点P的轨迹方程退化为:直线x=0和圆(a-b)(x2+y2)+2aby=0.与情形(i)相同:前者即直线AB,后者即是Apollonius圆.
(iii) 当点O是线段AB中点,即a=b且θ=90° 时,由方程②知点P的轨迹方程退化为:xy=0.即轨迹是:直线AB和线段AB的垂直平分线.
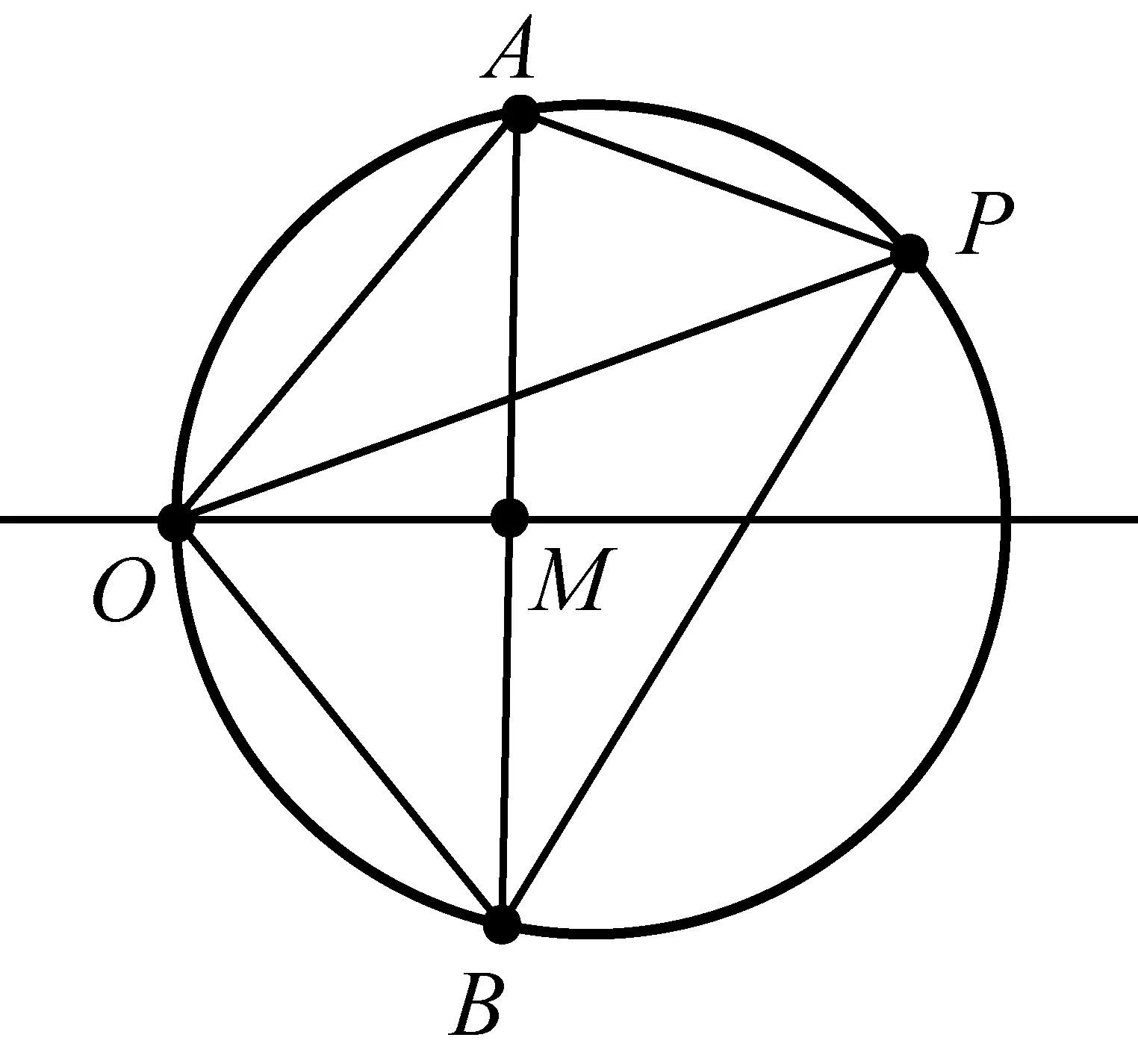
图4
(iv)如图4,三点O、A、B不共线且a=b时,由方程②知点P的轨迹方程退化为:直线y=0和圆(x2+y2)cosθ-ax=0.前者是线段AB的垂直平分线,而后者是△OAB的外接圆.
(v)如图3,当三点O、A、B不共线(即0° <θ<90° )且a≠b时,方程②表明:此时点P的轨迹是一条非退化的三次曲线.可以证明:这条三次曲线有一条渐进线(见图3中的直线m),其方程为
x(a-b)sinθ-y(a+b)cosθ
如图3,设线段AB的中点为M.易知:渐进线m与直线OM平行.
查询了一些相关文献后得知:非退化的三次曲线的分类非常复杂(参看文[2]文[3]).而上面B取无穷远点这种极限情形下的轨迹曲线(x2+y2)(xsinθ+ycosθ)=2axy就是三次曲线中的环索线[4][5][6].据文[6]所说,环索线也称为“布尔梅斯特(Burmester)曲线”.
对环索线(x2+y2)(xsinθ+ycosθ)=2axy上的点P,仍有“直线PA、PB关于直线PO对称”的性质(只不过因B是无穷远点,作直线PB时要保持固定的倾斜角180° -θ).值得注意的是:这一性质与文[4]中介绍的环索线的性质1有些相似,但不并相同!
三次曲线虽然是由方程来定义的,但上面的结果表明:这一类三次曲线仍有简单而有趣的几何性质.由此我们想到:
问题2是否还有其它的三次曲线——它们也有着简单而有趣的几何性质?
又,非退化的二次曲线有不少统一的几何性质.但对非退化的三次曲线,似乎鲜有所闻.
4 对偶问题
在问题1中,如将“直线”替换成“点”,将“关于直线对称” 替换成“关于点对称”, 将“动点的轨迹” 替换成“动直线的包络”,我们就想到了与问题1对偶的如下问题(但并非对偶命题!):
问题3a、b、c为平面上的三条定直线.若动直线l被直线a、b所截得的线段被直线c平分,求动直线l的包络.
注:从包络的完整性角度考虑,我们约定:当动直线l取a、b、c时也符合问题3的条件.
如图5,设a、b、c两两相交的三交点分别为A、B、C(限于篇幅,本文仅研究这种情形).
假设动直线l被a、b所截得的线段DE被直线c平分,即直线c过DE的中点P.则直线b关于点P对称的直线b′也会过点D.反过来,点D是直线a与b′的交点.而l可由D、P确定.
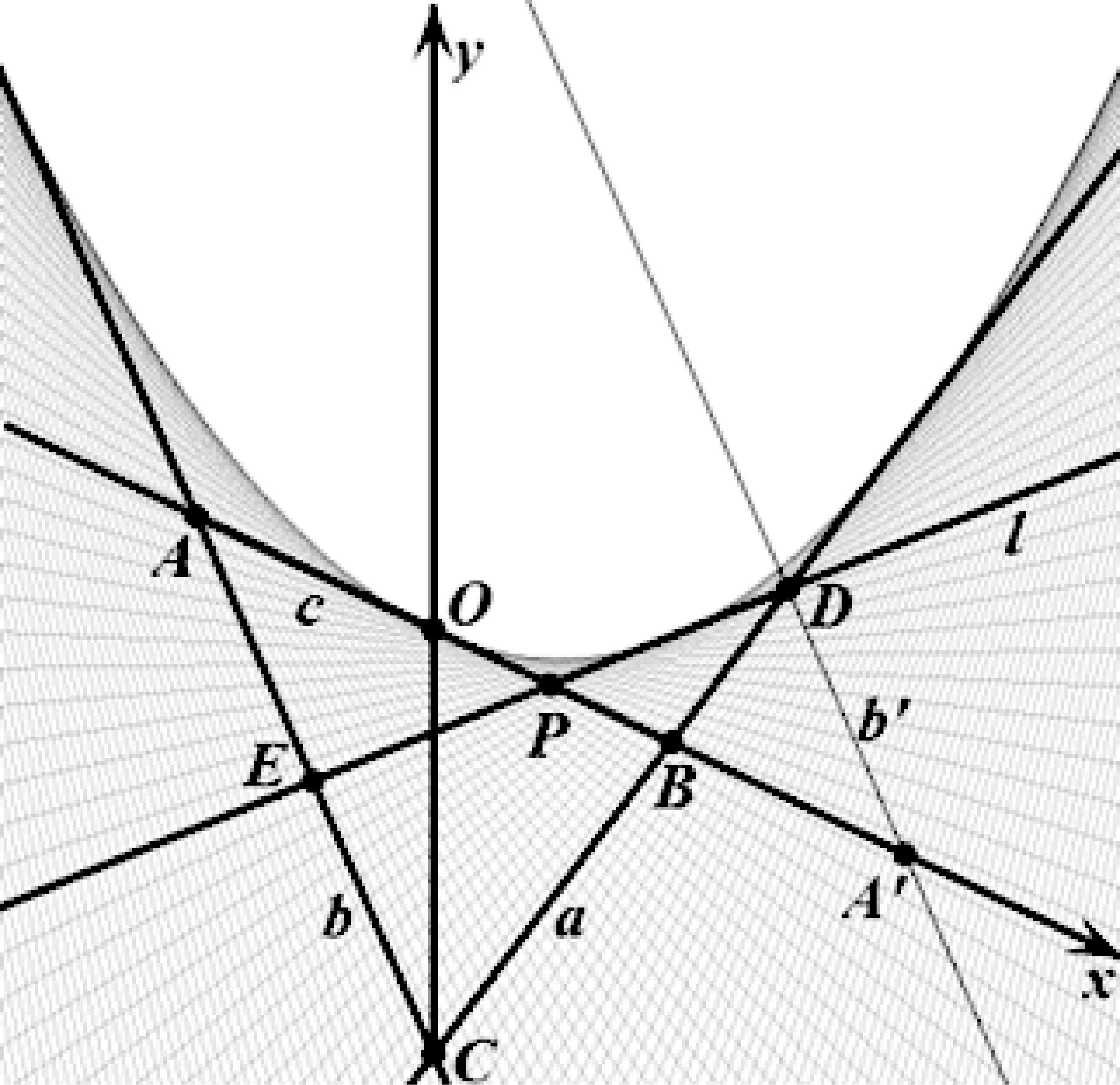
图5
由此,我们就可以作出动直线l的包络.
步骤1在直线c上任取一点P.作直线b关于点P对称的直线b′.直线b′交a于点D.
步骤2过D、P作直线l交直线b于点E.
显然,直线l符合问题3的条件.
步骤3如图5,让点P在直线c上运动即可得到动直线的l的包络.
直观地看,动直线l的包络应该是一条抛物线.下面我们将证明这一点.
定理1平面上三条定直线a、b、c两两相交但不共点.若动直线l被a、b所截得的线段被c平分,则动直线l的包络是一条抛物线.
证明如图5,取线段AB的中点O,作直线OC.设│OC│=m,│AB│=2n.
以O为原点,以直线c为x轴,以直线OC为y轴建立平面斜角坐标系.
则A(-n,0),B(n,0),C(0,-m).
则直线a为 -mx+ny+mn=0,
直线b为mx+ny+mn=0.
又设直线c(即x轴)上的动点P为(p,0),
则点A关于点P的对称点A′为(2p+n,0),
则直线b关于点P对称的直线b′为
mx+ny-2mp-mn=0,
则动直线l(即DP)为mpx-n2y-mp2=0.
这表明:动直线l的包络为抛物线.证毕.
易知,两点(2kn,k2m)、(-2kn,k2m)都在此抛物线上,则它们的中点(0,k2m)在y轴(即直线OC)上.随着k的变化,以这两点为端点的弦构成抛物线的一组平行弦(平行于x轴,即直线AB).而二次曲线的一组平行弦的中点轨迹是它的一条直径.这表明:直线OC是此抛物线的一条直径.换个说法即是:这条抛物线的对称轴平行(或重合)于直线OC.
5 定理1的反问题
对定理1,我们还有如下反问题:
问题4对任意一条抛物线,它是否存在三条切线a、b、c,使得对于这条抛物线的异于a、b、c的任意切线l都有:切线l被a、b所截得的线段被c平分?
回答是肯定的.我们可以证明以下定理2.
定理2如图6,直线li切抛物线C于点Pi(i=1,2,3).P是C上异于P1、P2、P3的任意点.过点P作C的切线l,则直线l被l1、l2所截得的线段被l3平分的充要条件是:由P3和线段P1P2的中点所确定的直线平行(或重合)于抛物线C的对称轴.
证明设抛物线C为x2=2py(p>0),点P(x0,y0),Pi(xi,yi)(i=1,2,3).
则切线l的方程为xx0=p(y+y0),
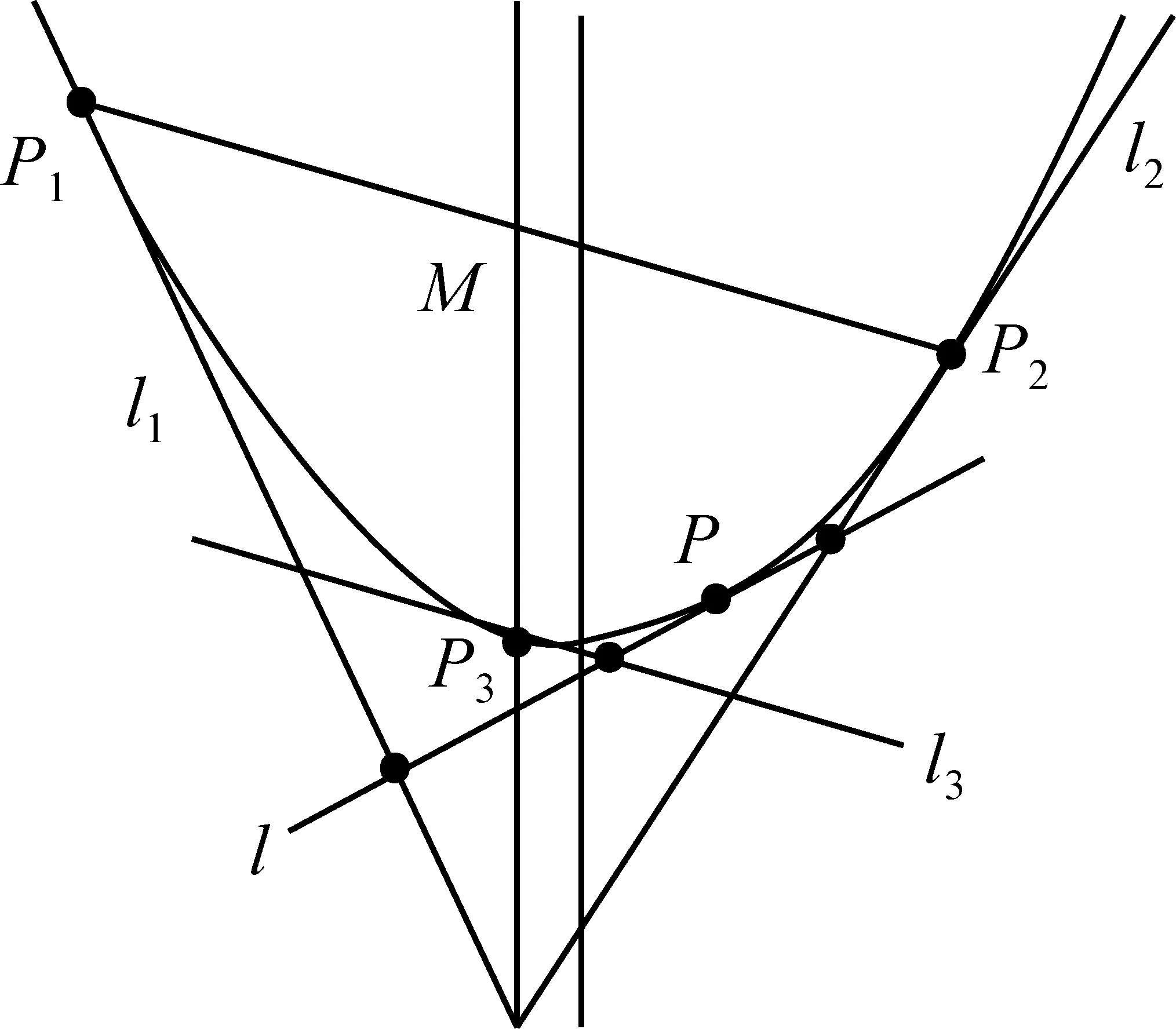
图6

则直线l被l1、l2所截得的线段被l3平分的充要条件是
这也即是,由P3和线段P1P2的中点所确定的直线平行(或重合)于y轴 ,即C的对称轴.证毕.
猜你喜欢
数学大王·低年级(2022年4期)2022-04-22
红蜻蜓·低年级(2021年12期)2022-01-19
红蜻蜓·低年级(2021年12期)2021-12-19
中学生数理化(高中版.高考数学)(2021年4期)2021-07-20
中学生数理化·中考版(2019年8期)2019-07-13
学苑创造·C版(2018年3期)2018-05-28
中学生数理化·七年级数学人教版(2017年9期)2017-12-20
数学大世界(2017年15期)2017-06-21
小学生作文选刊·低年级版(2016年5期)2016-05-13
电测与仪表(2016年5期)2016-04-22
