小型混合动力船舶微网系统建模仿真
2018-07-13 01:36俞万能王文斌
集美大学学报(自然科学版) 2018年3期
孟 飞,俞万能,王文斌
(1.集美大学轮机工程学院 福建 厦门 361021,2.福建省船舶与海洋工程重点实验室,福建 厦门 361021)
0 引言
目前,分布式电源(distributed generation,DG)在陆地配电网中渗透率不断提高,微电网运行控制策略研究日趋成熟,为船舶微网的构造和控制提供了研究思路。文献[1-2]对分布式微电网系统并网模式下的控制策略进行研究,验证了微网在孤岛和并网模式控制策略的有效性;文献[3-4]对微网并网逆变器的切换控制策略进行研究,验证了通过对环流的有效控制能实现微网并网与孤岛运行的平滑切换;文献[5]对微网的能量系统进行研究,通过合理的运行控制策略实现微网的能量管理。船舶运行工况复杂多变,其在构造和关键技术上均与陆地微电网有所不同。文献[6]对船舶微电网概念进行了阐述,分析了可再生能源接入船舶微网的船舶电力系统与传统船舶电力系统的区别,并探讨了船舶微网需要研究的关键技术;文献[7]对船舶微网储能双向DC/DC进行研究,提出了储能系统安全充放电管理的控制策略;文献[8]针对由光柴储(光伏电池,柴油发电机和储能电池)组成的交流船舶微网系统,使用MATLAB/SIMULINK进行建模,提出并网模式下的功率分配策略,并进行仿真验证。
船舶微网不同于陆地微电网,船舶航行状态复杂多变,负载功率波动较大,上述文献并未考虑在负荷波动情况下系统的稳定性,因此,本文根据船舶设计时的基本参数和要求,对由光伏电池、柴油发电机和锂电池组成的小型多能源船舶微网系统进行建模,提出适配于负荷动态波动下的能量管理策略,应用MATLAB/SIMLINK搭建系统模型,对该能量管理调度策略进行仿真验证。
1 多能源船舶微网的电力系统拓扑结构
船舶航行时负荷波动频繁,图1为模拟负荷有功功率图。多组逆变电源并联运行时不利于负载动态变化下船舶电力系统的稳定,为提高船舶微网系统在动态负载下的稳定性,本文采用图2的交流微网结构。该系统直流侧由光伏电池、光伏控制器、双向DC/DC变换器(bi-directional DC-DC converter,BDC)和储能电池组成;交流微网由柴油发电机、逆变电源和交流负载组成;逆变电源负责把直流侧电能输送至交流微网。该微网系统中光伏电池经控制器向直流母线输出功率,BDC为储能电池,负责充放电管理,逆变器具有独立运行的恒压恒频(V/F)控制运行模式和并网运行的恒功率(P/Q)控制运行模式。

2 多能源船舶微网系统的建模
文中光伏阵列及其MPPT控制器建模参照文献[9];储能电池采用SIMULINK系统库中LiFePO4电池;柴油发电机建模参照文献[10];船舶微网其他单元建模如下。
2.1 BDC建模
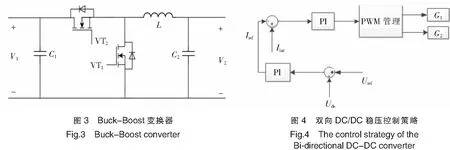
双向Buck-Boost变换器电路模型如图3所示,其中电池输出端接Buck-Boost变换器V2端,V1端接直流母线。直流母线的电压稳定控制,对于直流侧的稳定运行有重要作用。直流母线连接着光伏阵列、储能装置和逆变电源,本文中直流母线电压控制策略由储能装置的BDC控制实现。BDC采用图4的双闭环控制策略,外环是电压环,内环是电流环。图4中,Uref为给定外环母线参考电压值;Udc为外环母线电压反馈值;Iref为电压外环计算得到的DC/DC输出电流内环参考值;Ibat为DC/DC输出内环电流反馈值;G1和G2为开关控制信号。
2.2 逆变器建模

当船舶微网处于光伏、储能电池和柴油发电机联合供电时,逆变器采用P/Q控制模式,柴油发电机为微网提供频率和电压支撑,原理如图6所示。采用电流内环、功率外环的双闭环控制方式,功率外环给定功率Pdref、Qref,通过idref=2Pref/(3uod)和iqref=-2Qref/(3uod)计算出参考电流idref和iqref,电流内环控制与V/F控制相同,最后经SVPWM控制得到逆变器IGBT的开关信号,从而实现逆变器的恒功率控制。

3 多能源船舶微网能量管理调度策略
相对于陆地微电网来说,船舶微网未与大电网并网,整船处于孤岛模式。目前国内投放市场的小型多能源电力推进船舶能源管理多以光伏电池和柴油发电机为储能系统充电,船舶设备供电主要由储能系统提供,而光伏电池、柴油发电机和储能系统并未并网运行。
一般地,相对于光伏电池和储能系统部分存在两种运行模式:并网运行模式与独立运行模式。其中光伏电池和储能系统与柴油发电机并联运行称为并网运行模式,柴油机未并网时称为独立运行模式。本文能量管理针对这两种运行模式提出相应的能量管理策略和运行模式切换策略。
根据系统功率平衡关系:Pload=Pg+Pbat+Ppv,在不同负载接入情况下,船舶微网有5种工作状况。
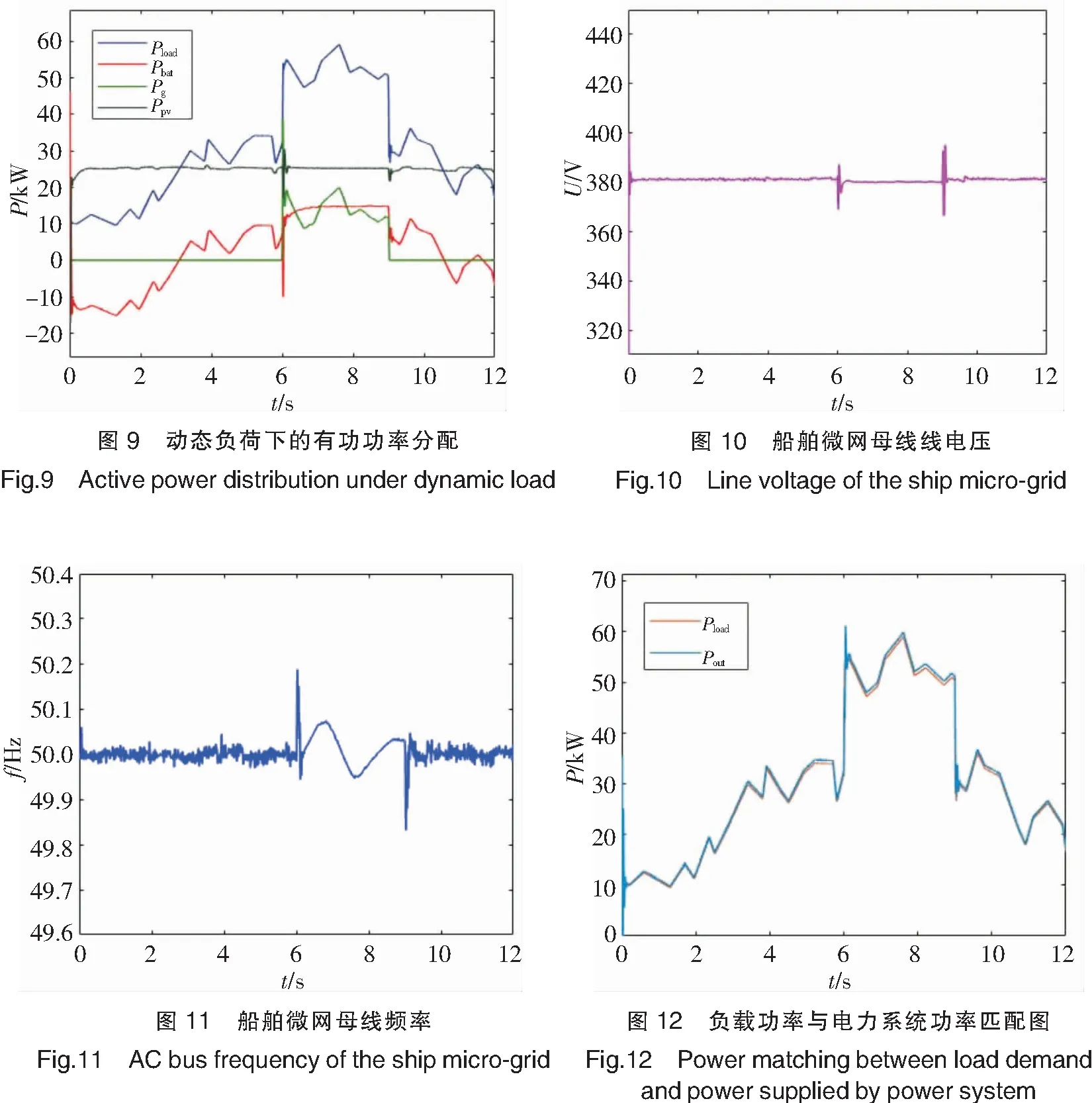
工况1Pload, 工况2Pload>Ppv且SOC>SOClow时,Pload=Pbat+Ppv; 工况3Pload>Ppv+Pbat时,Pload=Pg+Ppv+Pbat; 工况4初始时Pload 工况5初始时Pload=Pg+Ppv+Pbat,某一时刻负载突降,使得Pload 其中:Pload为负荷需求功率;Ppv为光伏输出功率;Pbat为锂电池充放电功率;Pg为柴油发电机输出功率;SOC为锂电池荷电状态;SOClow为锂电池荷电状态下限值。 在工况1和工况2情况下,系统处于独立运行,逆变器采用V/F控制,系统实现功率自治;工况3情况下,系统并网运行,逆变器采用P/Q控制,此时直流微网以最大恒定功率输出,负载功率变化由柴油发电机提供;工况4情况下,系统由独立运行切换到并网运行;工况5情况下,系统由并网运行切换到独立运行,如图7所示。 通过MATLAB/SIMULINK搭建船舶微网模型,如图8所示,其中:直流母线电压为640 V;交流母线线电压为380 V;频率为50 Hz;锂电池额定电压为537.6 V,且容量为100 A·h;光伏电池指定输出功率为25 kW;逆变电源并网功率输出功率为40 kW;柴油发电机最大输出功率可达到100 kW,采用图1所示动态负荷,仿真时长为12 s。 当T在0~6 s时,船舶微网处于独立运行,其中:0~3 s时Pload T=6 s时负荷突增,系统检测到Pload>Ppv+Pbat,船舶微网系统处于工况4状态,独立运行切换至并网运行,逆变电源由V/F控制模式切换至P/Q控制模式,这一阶段电压和频率最大变化率分别为4.47%和0.38%,恢复时间分别为0.16 s和0.12 s,逆变电源切换较为平滑。 当T在6~9 s时,Pload>Ppv+Pbat,船舶微网处于并网运行且Pload=Pg+Ppv+Pbat,系统处于工况3状态,这一阶段柴油机发电机并入船舶微网,交流母线电压保持不变,受柴油机的调速特性影响,交流母线频率略有波动,负荷波动下系统功率自治且稳定性较高。 T=9 s时负荷突降,系统检测到Pload 上述过程的仿真波形见图9~图11。图9表明,通过上述电能变换器的协调运行控制,各微源能较好地实现能量管理调度策略。图10~图11表明,在独立运行、并网运行以及两种运行方式的切换中,船舶微网电压和频率均满足我国《钢质海船入级规范》[11]的要求。图12表明,船舶微网输出功率Pout能及时跟随实际运行时动态负荷需求功率Pload。 本文提出了动态负荷下的光柴储船舶微网能量管理策略,应用MATLAAB/SIMULIK进行建模仿真。仿真结果表明: 1)船舶微网处于独立运行时,BDC对直流母线进行稳压控制,逆变器处于恒压恒频控制,在负荷波动欠载和过载时,光储输出功率能及时的满足负荷需求。 2)船舶微网处于并网运行时,逆变器处于恒功率控制,柴油发电机输出功率跟随负荷波动变化,实现了船舶微网在动态负荷下的稳定运行。 3)船舶微网独立运行向并网运行切换时,电压和频率瞬时波动分别为4.47%和0.38%,恢复时间分别为0.16 s和0.12 s;并网运行向独立运行切换时,电压和频率瞬时波动分别为4.73%和0.32%,恢复时间分别为0.11 s和0.08 s,较好地实现了平滑切换。
4 仿真分析

5 结论
猜你喜欢
故事作文·高年级(2021年12期)2021-12-21能源工程(2021年3期)2021-08-05煤气与热力(2021年6期)2021-07-28控制与信息技术(2021年2期)2021-07-23煤气与热力(2021年4期)2021-06-09电子制作(2019年11期)2019-07-04电子制作(2019年7期)2019-04-25通信电源技术(2018年3期)2018-06-26能源(2017年12期)2018-01-31军事文摘(2016年16期)2016-09-13