
直升机航向模态切换方法设计*
2018-07-11 01:03史青海
机械研究与应用 2018年3期
明 星, 史青海
(中国直升机设计研究所,江西 景德镇 333001)
0 引 言
协调转弯是现代直升机飞控系统航向通道必备的功能之一。直升机进行转弯或者导航飞行时,如果不能实现协调转弯,便会出现侧滑,使飞行阻力增大,品质差。航向稳定是航向通道最基本的功能,是所有高级模态的基础。因此设计合理的控制律,实现协调转弯功能与航向稳定功能的平滑过渡,对改善直升机的飞行品质和操纵品质具有重大意义。针对直升机协调转弯控制的设计,文献[1]、[2]给出了协调转弯模态的控制设计框图和指标,文献[3]对直升机协调转弯进行了机理和控制律设计的分析。但在实际工程应用中出现的退出协调转弯转入航向稳定模态出现航向抖动问题很少有分析和解决措施。
笔者针对直升机协调转弯控制设计和航向稳定控制律设计的构型进行了分析,确定了航向控制律的关键参数,进而给出了合理的控制律结构,采用了分析、仿真等手段完成了协调转弯与航向稳定模态的平滑设计。该方法实现简单,克服了退出转弯进入航向稳定模态瞬间的抖动问题,改善了航向操纵品质,经过试飞验证该方法有效可行,在工程中具有极大的使用价值和经济价值。
1 协调转弯控制律设计
直升机的协调转弯功能是利用航向和倾斜通道的协调配合来实现的。所谓协调转弯是飞机在水平面内连续改变飞行方向,保证滚转和偏航运动两者耦合影响最小、并能保持不掉高度的一种转弯机动。在实际飞行中,飞机的滚转与偏航运动并不是完全独立,而是紧密联系、相互交叉耦合的。


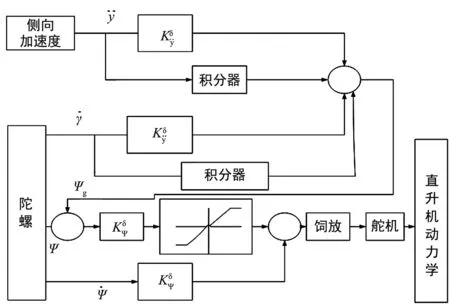
图1 协调转弯系统框架图
自动驾驶仪的协调转弯功能是基于直升机三轴稳定的基础上实现的。一般情况下,飞行过程中飞行员会接通三轴稳定功能和协调转弯功能。当飞行员横压驾驶杆使得直升机倾斜角达到规定门限角度时且飞行速度大于设定值时,驾驶仪进入协调转弯工作模态。航向通道控制则是适当的航向角速度跟随倾斜角,使直升机在转弯时不出现侧滑。当直升机从转弯状态进入稳定状态后,倾斜角小于设定值,驾驶仪自动退出协调转弯功能转入航向稳定功能。这样可以避免倾斜角在设定值附近,协调转弯和航向稳定模态的频繁切换。
实际飞行中,直升机从航向稳定状态进入转弯时,倾斜角由飞行员通过压杆实现的,倾斜角大小根据任务需要来控制,因此航向角速度也要随之及时调整。协调转弯要求在转弯时减小侧向过载,在机动飞行中,在任何情况下航向角速度是不能及时跟随倾斜角变化,为进一步减小时间产生的侧向过载,提高协调转弯控制的效果,引入机上的侧向加速度计信号进行反馈,并采用其比例-积分控制,以利于消除机动飞行过程中实际产生的侧向过载。由此确定了协调转弯的控制律结构。
(1)
经过系统仿真和实际试飞调参,协调转弯功能实现,达到了预定的目的,证明设计的控制律结构参数合理正确。
航向稳定控制规律为:
(2)

2 退出协调转弯时新的航向稳定控制规律
在实际飞行中,当直升机退出协调转弯模态,转入稳定模态时,自动驾驶仪会记录由协调转弯切换到航向稳定状态并保持当前航向角。由于退出转弯时直升机仍然具有一定的航向角速度,因此随航向运动的惯性继续向转弯方向偏移,航向角会偏离退出转弯时记录的基准值,而此时自动驾驶仪进入航向稳定模态的控制,造成切换瞬间出现航向抖动现象。通过试飞数据观察,在模态切换瞬间放大器输出有突变。
针对航向抖动的原因,控制律采用在退出转弯进入航向稳定状态瞬间,以当时的航向角与航向角基准偏差值为基础,根据当前的航向角速度加权,适当的向转弯方向修正的协调策略,确定新的航向基准,过渡时刻控制规律公式为:
(3)

3 试验结果
本文通过建立飞行仿真模型,搭建飞控系统仿真环境,进行了航向通道的仿真。图2所示曲线是在接通协调转弯功能进入航向稳定功能后,航向通道放大器输出变化,图3所示是基于平滑处理的协调转弯进入航向稳定的放大器输出。
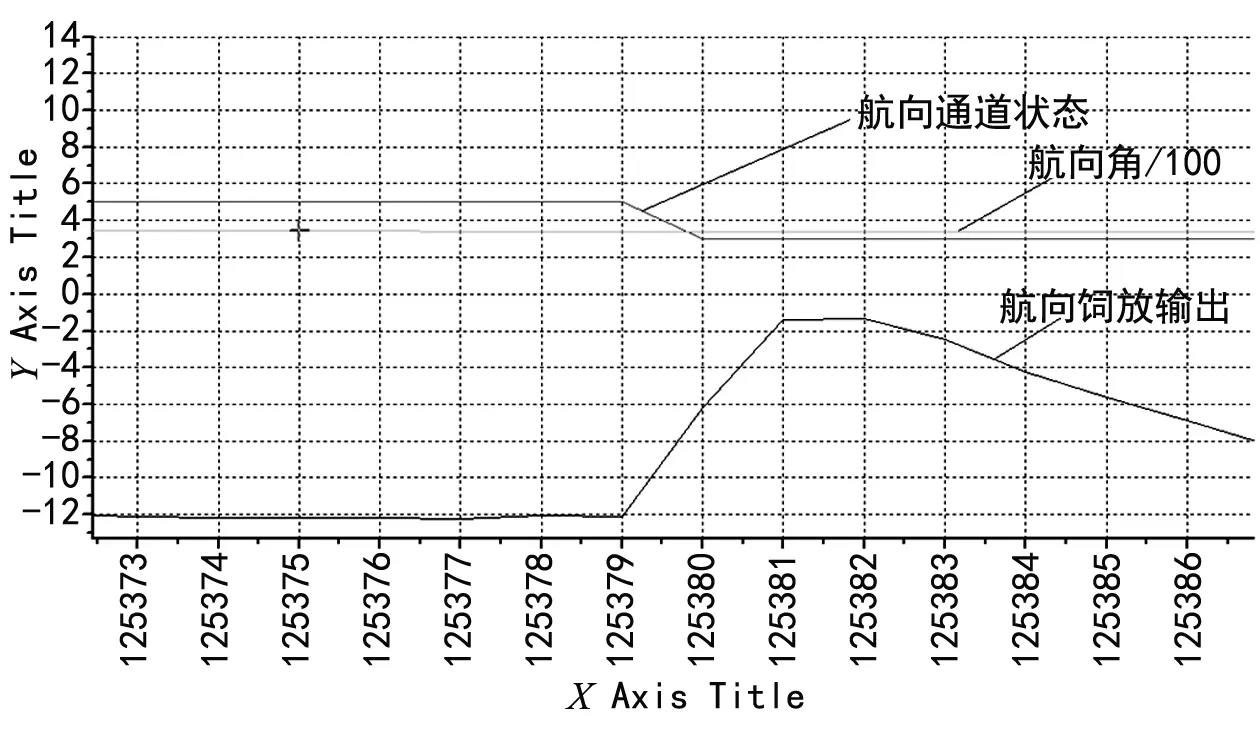
图2 协调转弯进入航向稳定航向输出
对比图2和图3的仿真数据可以得出如下结论:
(1) 基于平滑滤波后的从协调转弯进入航向稳定功能后放大器输出明显比图3未平滑的放大器输出平滑,无航向突变。
(2) 基于平滑处理的过渡处理后,进入航向稳定的控制精度与未平滑进入航向稳定功能的性能都能满足指标要求。

图3 基于平滑的协调转弯进入航向稳定航向输出
4 结 语
实现协调转弯功能是直升机自动驾驶仪设计任务之一。本文通过对飞机协调转弯过程和航向稳定功能的原理和控制律设计进行分析,确定了协调转弯退出进入航向稳定的控制律设计和结构。经设计、仿真、试飞结果均显示,本文提出的基于平滑处理的协调转弯退出的控制律设计合理、正确,完全满足协调转弯和航向稳定的指标要求,解决了协调转弯过程退出的航向抖动问题,明显改善了飞行员的操纵品质。本文设计所得的结果对其他飞机的航向通道模态转换控制律处理具有借鉴意义。
猜你喜欢
湖北农机化(2021年7期)2021-12-07
军民两用技术与产品(2021年8期)2021-11-24
河北理科教学研究(2020年2期)2020-09-11
中国惯性技术学报(2018年4期)2018-11-08
北京航空航天大学学报(2017年1期)2017-11-24
导航定位与授时(2016年1期)2016-03-16
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09
汽车科技(2014年6期)2014-03-11
