
无人机综合实验系统设计及实现
2018-07-10 08:52:36崔学良彭鹏菲李启元
实验科学与技术 2018年3期
黄 亮,崔学良,彭鹏菲,李启元
(海军工程大学 电子工程学院,湖北 武汉 430033)
在以网络为中心的信息化作战中,无人机系统是一种集战场感知、情报处理、通信传输、信息对抗、指挥决策、武器控制及火力打击于一体的新型作战力量,也是现代战场信息栅格体系中重要的综合信息处理与指挥控制节点。无人机系统装备的发展及作战运用将对未来新型指挥信息系统网络化、智能化及联合一体化的发展产生巨大推动力,是未来作战样式及指挥控制模式转变的重要环节,已成为指挥信息系统装备及专业技术发展的新兴领域。
地面站系统作为整个无人机系统的神经中枢[1]和作战指挥中心[2-3],控制着整个系统各项功能的实现,具体又可分为飞行控制站和综合任务系统两大部分[4-5]。飞行控制站主要控制飞行器的飞行过程、通信链路的工作状态及飞行器的发射与回收等,一般由无人机平台生产商提供。综合任务系统主要用于实现对各类任务载荷的操作与使用,同时与飞行控制站的联系也非常紧密,需要接收、处理飞行器的实时位置与运行状态,完成对多类数据的融合处理和战场态势的综合显示与评估,一般由用户自行设计或通过第三方定制开发完成。可以说,综合任务系统是无人机遂行各项使命任务的关键,而且随着未来任务的多样化,综合任务系统也必须能够支持新增任务载荷的快速接入、融合。
因此,本文提出一种无人机综合实验系统的设计及实现方案,既可模拟无人机任务系统的真实工作过程,满足高校相关专业基于数据通信、情报处理、辅助决策等方面的教学、培训,也可进行操作使用、任务规划等内容的模拟训练,辅助用户熟练掌握使用过程和操作流程;既可作为实验平台,开展串口控制、网络通信等方面的实践,又能作为综合仿真平台,开展任务规划、目标定位及数据融合等相关算法的分析、验证。
1 无人机综合实验系统总体架构分析
1.1 无人机系统体系结构组成
无人机系统主要由无人机平台系统、机载任务载荷、通信系统和地面站系统组成。
无人机平台系统是无人机系统的空中飞行部分,包括飞机机体、推进装置、飞行操纵装置及供电装置。通信数据链的机载部分、任务载荷也被安装在飞机上。
无人机能够遂行各类任务,离不开所搭载的任务载荷,而且有效载荷通常也是无人机最昂贵的子系统。任务载荷种类主要有光学传感器、雷达及通信设备,其他如气象及化学感应设备等传感器也曾被建议作为无人机的有效载荷。
通信系统是无人机的 “生命线”,对情报信息快速、准确的发送,对无人机实施有效、及时的指挥控制都依赖于通信。其中,上行链路对飞行器和任务载荷进行控制,下行链路则用于接收飞行器状态信息和各类有效载荷获取的图像和数据。
地面控制站,也称地面站系统,是无人机系统的作战指挥中心。控制指令的生成与发送、航路任务的规划、无人机飞行状态的显示、任务载荷探测信息的处理等都是在此完成。
如图1所示,给出了搭载可见光摄像机任务载荷的无人机系统的典型体系结构。
1.2 无人机综合实验系统硬件设备组成
在分析无人机系统体系结构组成的基础上,进行无人机综合实验系统的搭建。实现过程中,重在原理的演示验证,而不是关注设备的指标性能,同时从操作可行性及成本控制角度考虑,最终确定系统组成为飞行平台选用多旋翼无人机(采用国产开源飞控设备);机载任务载荷采用可见光摄像机和红外热像仪双传感器设备;选用高清图传电台、数传电台实现无人机与地面站之间的数据通信;飞行控制站硬件选用笔记本电脑,软件系统在开源代码基础上二次开发实现;综合任务系统硬件选用标准机柜,软件则自行设计开发完成。
1.3 无人机综合实验系统软件功能需求
无人机飞行控制站主要实现对无人机的监视、导航和控制,从而完成既定的任务,软件一般由无人机平台生产商提供,因此无人机综合实验系统的软件主要侧重于综合任务系统的功能设计与实现。综合任务系统主要实现对任务载荷的操控,完成对任务载荷探测信息的处理和显示,其软件功能需求如图2所示。论文中主要围绕电子地图导航、航路任务规划、有效载荷控制、战场态势显示、目标定位解算及测量数据分析等重点功能的设计及实现展开分析。
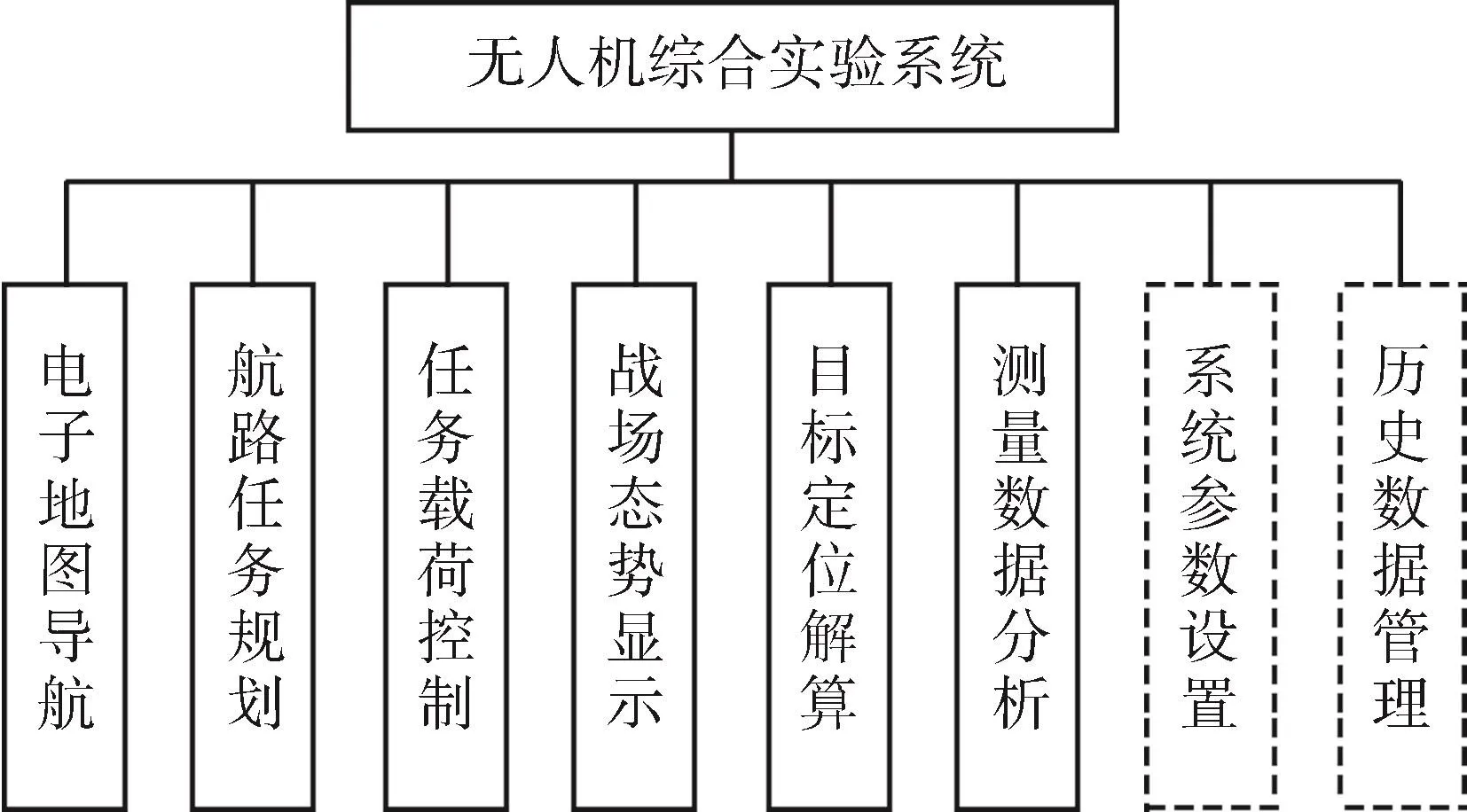
图2 无人机综合实验系统软件功能需求
2 无人机综合任务系统指挥与控制
2.1 无人机综合任务系统典型工作过程
地面站系统是无人机系统的作战指挥中心,是指挥员的指挥场所。指挥员的职责是接受上级指挥员的任务分配,进行任务规划,并向有关部门汇报所获取的数据及情报。地面站通常为飞行器及任务载荷操作人员留有位置,使其能够完成监视与执行任务的功能。
以光电载荷对目标区域进行侦察任务为例,无人机综合任务系统的指挥控制过程为指挥员领受上级任务后,飞行器操作员根据无人机性能、任务区等约束条件,完成无人机航路任务的预先规划,同时任务载荷操作员确定好载荷的使用时机、工作模式等事项。无人机启动后,光电载荷同步加电,启动过程中完成自检,以保证载荷系统工作正常。无人机飞抵目标点过程中,可设置光电载荷为自动扫描工作模式,以实现对过程区域的随机侦察。抵达预定目标区域后,无人机进入规划航路,开始对目标区域进行重点搜索,同时任务载荷操作员处于任务回路中,可随时干预调整;若发现目标,系统给出报警,任务载荷操作员对目标进行判别,并转换光电载荷工作模式为锁定跟踪,获得目标位置及运动参数等数据后,指挥员视情向上级指挥部门上报所获取的目标情报。
2.2 无人机综合任务系统数据传输流程
无人机飞行控制系统分为机载部分和地面部分,其中机载部分负责维持飞机的稳定飞行并提供飞机状态、位置信息及任务载荷的测量信息给地面站,地面站则根据飞机状态及得到的载荷测量信息做出下一步飞行的目标规划并发送给机载部分。地面部分与机载部分之间有两条数据链路,分别用于传送载荷测量信息和飞行状态及控制站指令。地面站通过上行链路与机载飞行控制系统通信,以发送飞行控制命令与载荷控制指令,下行链路则负责传输载荷探测数据和无人机飞行状态信息。数据传输主要过程如图3所示。
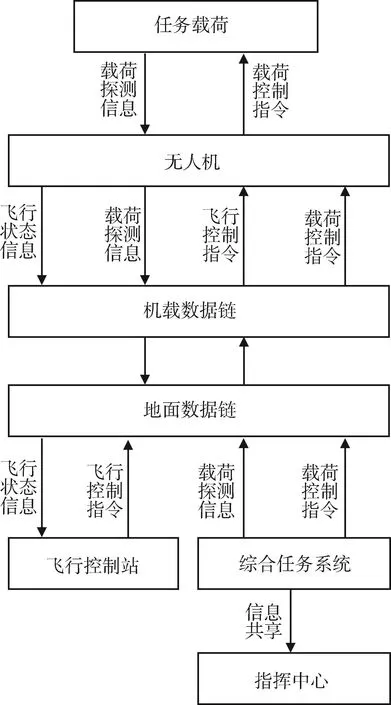
图3 无人机综合实验系统数据传输过程
在构建完成无人机综合实验系统的硬件总体架构、熟悉无人机综合任务系统的指挥与控制及数据传输流程后,接下来进行地面站软件系统设计,重点从无人机航路任务规划、载荷控制、战场态势生成与综合显示等关键技术入手,分别进行了分析与实现。
3 航路任务规划及有效载荷控制
3.1 无人机飞行航路任务规划
无人机的飞行控制主要由所采用的飞控设备完成,其中包含控制律和算法[6];而无人机路径规划[7]的根本任务就是综合所有的约束条件为飞行器设计 “满意” 的路径[8-9], 这些约束条件包括飞行器物理特性、导航性、突防性、战略和战术等约束条件。航路规划本质上是将规划路径的关键点位置参数发送给飞控设备控制无人机飞行实现的。
无人机飞行航路任务规划功能主要包括无人机位置及姿态在电子地图的实时显示和无人机航路规划两大部分。通过电子地图,实现缩放、漫游及实时显示无人机的位置和飞行轨迹,方便操作人员对其监控。
3.1.1 无人机位置及姿态实时显示
通过在电子地图上实时显示无人机位置(纬度、经度、高度),在仪表控件上显示无人机姿态(航向、航速、方位角、俯仰角、滚转角等)及主要设备(动力、数据链、GPS等)等的状态,可以让用户清楚掌握无人机的运行状况。
电子地图功能的实现主要有两种方法:1)调用MapInfo公司开发的MapX接口,使用离线地图库;2)使用各类地图提供商(如Google地图、Bing地图等)的API进行二次开发,地图可在线使用,也可预先缓存目标区域地图满足离线使用需求。从电子地图的适用性和升级方便角度出发,方案选用第二种方式实现,同时考虑到地图提供商服务的稳定性,在此采用微软公司的Bing卫星地图完成无人机GPS位置的实时显示。
3.1.2 无人机航路规划
无人机航路规划的具体实现可分为两种方式:1)手动规划,利用基本的GIS编辑功能,在背景地图上通过鼠标点击依序设定无人机飞行航路点参数,包含航路点的WGS-84坐标、飞行高度、速度及航向等数据;2)根据已知的各类约束条件(无人机物理性能、任务区、威胁区、禁飞区等)、依据一定的最优原则(路径最短、覆盖范围最大等),通过采用不同的路径规划算法(如遗传算法、粒子滤波等)或是典型任务航线(等高航线、变高航线、变高变速航线、扫描航线等),实现无人机航路的自动规划。
实现效果如图4所示。利用提供的标绘工具,实现对无人机、各类舰艇,以及航路、任务点、区域的标绘及属性编辑;通过任务操控工具,可以显示当前任务信息,并提供任务查询、新建、编辑、打开、保持、关闭及删除任务等操作。任务航线可以保存在航线文件夹内,用户可以重新编辑已有的任务航线和创建新的任务航线。
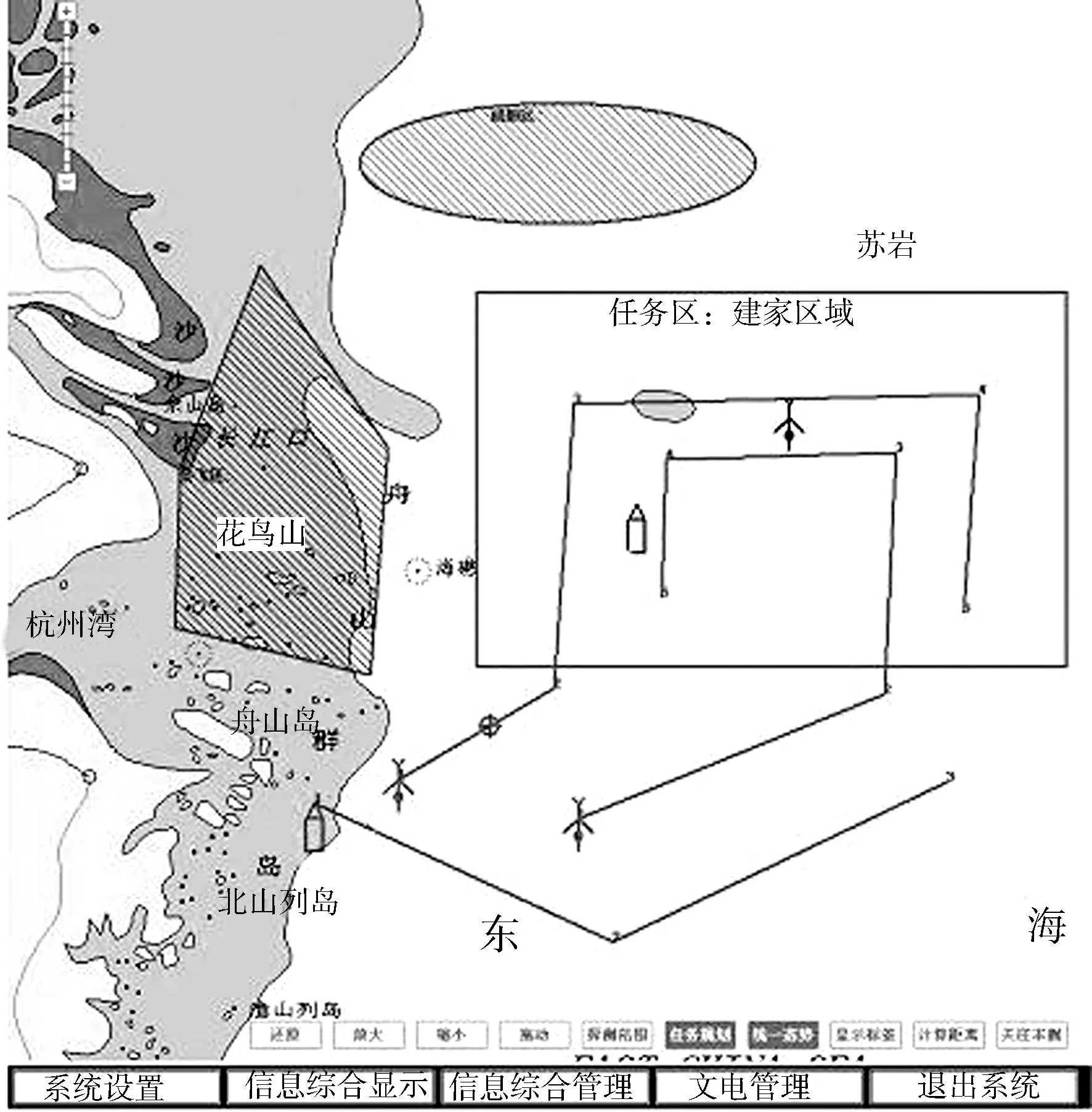
图4 无人机航路规划
3.2 任务载荷控制与使用
数据链系统包含机载端、地面端两部分,两者通过无线链路实现数据传输,其中机载端有线连接无人机飞控设备,负责接收地面端发送的控制指令、反馈无人机和任务载荷的状态数据;而地面端则有线连接综合任务台,实现发送控制指令到机载端、接收机载端发来的无人机和任务载荷状态数据。数据链地面端与综合任务台之间的信息传输,借助RS 232串行通信来实现。串口通信的典型工作过程如图5所示。
在利用VC++实现串口通信时,选用基于Microsoft的ActiveX控件MSComm的方式,这种方法具有原理简单、容易实现及性能稳定等优点。一般而言,厂家不同,所生产设备的通信协议也不一样,因此需根据光电载荷生产厂商提供的通信协议,来转换得到控制指令或是解析得到接收设备状态反馈数据。综合任务台对光电任务载荷的操作主要有设定工作模式(自锁、回零、自动扫描、手动搜索、跟踪、角度定位等)、切换传感器类型(电视/红外)、调整参数(变焦/调焦、快/慢、相关/质心等)及视频显示(波门开/关、视场角开/关、角度开/关等)。
4 战场综合态势生成与数据分析
利用无人机所搭载的有效任务载荷,获得各类直接探测信息,以此为基础,通过信息融合、分析处理可进一步获得战场环境的综合态势。
4.1 基于任务载荷测量信息的战场态势显示
雷达任务载荷可直接获得战场环境的目标图像,光电载荷能够得到目标区域的可见光/红外视频图像,通过这些探测信息可直观掌控环境的总体状况。在综合任务系统中利用视频采集卡,实现视频信号的高速采集处理;在进行视频显示时,可以采用Direct Show完成视频数据的处理过程[10]。
Direct Show是Microsoft公司为了简化流媒体处理而提供的基于Windows平台的开发包,与DirectX开发包一起发布,为多媒体的捕捉、处理、存储和回放提供了强有力的支持,直接支持视频的非线性编辑、与数字摄像机的数据交换。Direct Show提供的是一种开放式的开发环境,用户可以根据自己的需要定制自己的组件。
4.2 基于信息融合的光电探测目标定位解算
光电载荷除了可以得到目标区域的视频图像外,还有目标相对于光电载荷基准轴向的方位角、俯仰角测量值,再利用无人机平台的GPS位置和姿态测量信息,经信息融合处理,采用一定的目标定位模型算法(如测向交叉定位、最小二乘法、粒子滤波等算法),可以解算得到目标的定位数据。
定位解算所需的测量数据分别来自无人机和光电载荷两个平台,其中无人机GPS信息是在大地坐标系下得到,光电载荷的角度测量数据则是在无人机坐标系下得到,最终的定位结果如目标的经度、纬度又需要变换到大地坐标系下。因此,信息融合首先要进行空间配准(坐标系转换)[11]。此外,由于无人机导航、姿态数据和光电载荷数据测量频率不一致,所以在使用数据时,还要有一个时间配准融合过程。
本功能可提供仿真环境产生的数据或者实际试验数据作为目标定位算法的统一输入,用于开展关于时空配准、目标定位模型等方面的比较、验证及分析。
4.3 基于VC++和MATLAB的测量数据分析
屏幕所有显示信息(包括视频叠加画面)都可以保存到飞行历史文件中,用户可以根据日期、时间检索历史飞行记录,也可通过飞行历史回放模式再现无人机某一次飞行任务的全过程,方便对无人机的飞行状况及任务执行情况进行分析。
在分析各类数据时,通过绘制曲线可以直观了解数据的相关特性。MATLAB在数据处理、绘制实验曲线方面功能强大,因此方案中利用VC++调用MATLAB服务引擎的混合编程[12]方式来实现数据的统计及分析。
如图6所示,给出了利用VC++调用MATLAB读取无人机指挥车的GPS日志文件的结果,由于过程中指挥车处于停靠状态,因此从中可以分析所使用的GPS设备的定位精度性能。
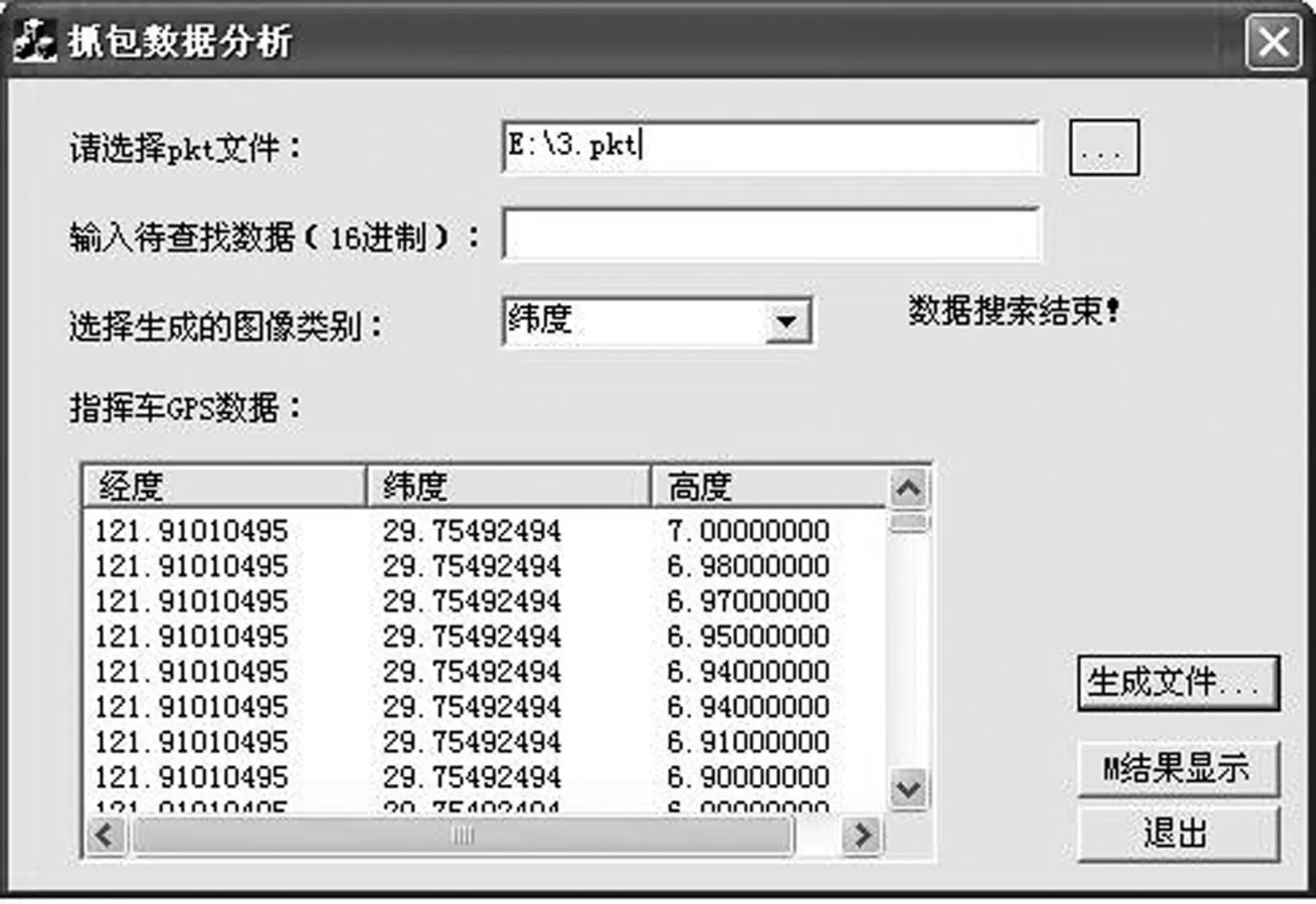
图6 VC++调用Matlab实现混合编程
5 结束语
目前,无人机系统已在情报监视与侦察、战场态势评估、通信中继及电子战等多个领域开展了广泛应用。作为无人机系统的作战指挥中心,地面站系统实现对无人机的监视、导航、控制和对任务载荷的操控、探测信息的处理和显示。本文从教学培训和科研实验的角度出发,提出了一种无人机综合实验系统的设计及实现方案,能够模拟无人机任务系统的真实工作过程,开展航路任务规划、载荷控制等方面的实际操作,还可满足对任务规划、目标定位及数据融合等相关算法的分析和验证。
[1]周焱.无人机地面站发展综述[J].航空电子技术,2010, 41(1):1-2.
[2]张治生.无人机地面站系统设计与开发[D].西安:西北工业大学,2007.
[3]彭鹏菲,黄亮,李启元.基于通用接口的无人机指挥控制仿真实验系统设计[J].实验科学与技术,2016,14(6):17-19.
[4]陈丽苹.无人机地面控制站系统软件设计[D].大连:大连理工大学,2015.
[5]刘智腾.小型无人机地面站软件设计与实现[D].南昌:南昌航空大学,2015.
[6]SZCZERBA R J, GALKOWSKI P, CLICKSTEIN I S, et al.Robust algorithm for real-time route planning[J].IEEE Transactions on Aerospace and Electronic Systems,2000, 15(6):239-240.
[7]苏康,刘经南,闫利.基于GIS的无人飞行器路径规划[J].武汉大学学报(信息科学版),2003,28(2):188.
[8]DAVID C, RITA C, CARLOS S.A nonlinear quadrotor trajectory tracking controller with disturbance rejection[J].Control Engineering Practice, 2014, 15(4):148-150.
[9]WEI D, GUO Y G, XIANG Y Z, et al.High-performance trajectory tracking control of a quadrotor with disturbance observer[J].Sensors & Actuators A:Physical,2014, 211(5):67-77.
[10]NASCIMENTO J C,MARQUES J S.Performance evaluation of object detection algorithms for video surveillance[J].IEEE Transactionson Multimedia,2006, 36(4):113-115.
[11]黄亮,刘忠.空中机动平台光电吊舱对目标定位方法分析[J].武汉理工大学学报 (交通科学与工程版),2013,37(1):102-105.
[12]章国林.小型无人机路径规划算法与地面控制站软件的开发[D].杭州:浙江大学,2011.
猜你喜欢
水上消防(2022年2期)2022-07-22 08:45:00
装备制造技术(2020年9期)2021-01-26 00:14:34
领导决策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
北京航空航天大学学报(2016年9期)2016-11-16 02:02:39
中国卫生(2016年2期)2016-11-12 13:22:16
中国工程咨询(2016年4期)2016-02-14 07:28:28
海军航空大学学报(2015年3期)2015-11-11 17:18:49
中学历史教学(2015年11期)2015-11-11 07:09:09
中国民航大学学报(2015年3期)2015-03-01 01:57:13
