
基于数字近景摄影的基坑监测方法改进与实现
2018-07-09 02:53李国鸿杨正丽覃发超
实验科学与技术 2018年3期
李国鸿,杨正丽,孟 良,覃发超,鲁 恒
(1.航天建筑设计研究院有限公司,北京 丰台区 100070;2.四川大学 水利水电学院,四川 成都 610065;3.总装备部工程设计研究总院,北京 朝阳区 100028;4.西华师范大学 国土资源学院,四川 南充 637009)
基坑边坡变形监测主要对基坑支护结构实施监测,在施工期间对基坑支护体进行连续的高精度监测,并从岩土工程专业的角度对监测数据、信息进行及时分析,为相关部门及时提供可靠的数据信息;从而用以评定基坑施工对周围土体的影响,对可能发生的安全事故及时提出建议;预防基坑开挖所引起的周围土体附加变形对基坑带来不良的安全隐患,为施工安全和施工方案优化提供科学依据。
传统基坑水平位移监测方法主要有测小角法、极坐标法、视准线法、三角导线法、三角网法等[1];而坡顶竖向位移监测则主要采用几何水准测量方法。
传统测量方法存在以下3点不足。
1)传统监测方法是一种接触测量方法,对基坑监测人员存在不确定的危险性,从某种意义上说增加了安全风险,对单位的安全管理带来了一定的压力;
2)传统监测方法作业时间长,受场区环境影响较大,在规定的监测频率内,有可能需要耗费大量的时间,为了加快作业进度,有可能需要增加作业组,相应就会增加时间成本和人员成本;
3)测小角法、极坐标法、视准线法等传统监测方法对测区条件有一定的要求[2],所以测区情况对监测方法的选择有较大的局限性,目前的情况是为了缩短外业作业时间,选择的作业方法可能不太适合基坑的实际情况,导致的后果就是变形数据不能真实地反映基坑变形情况。
本文提出了一种采用数字近景摄影测量方法进行基坑边坡水平位移监测的技术方法,从而实现了高效、无接触、高精度的测量。
1 研究方法
摄影测量作为近年来发展较快的一种测量技术手段,已经广泛地应用于测量项目工作中。数字近景摄影测量通过获取被测物体清晰的影像信息及少量的外业控制点,来完成其各种测量工作[3-4],可获取被测区域任意点三维坐标,快捷、方便、精度高并实现无接触测量。三维监测技术可以快捷高效地判断监测目标的整体和局部变形情况,可以有效地弥补传统监测技术的不足[5]。近景摄影测量和传统监测方法一样也存在一定的局限性,控制点必须选在稳定可靠的区域[6],且必须在摄影范围之内,摄影范围内不能有遮挡物,保证视线通视。
数字近景摄影测量主要通过普通单反高分辨率的数码相机,拍摄被测物体影像[7]。通过新的影像匹配技术(能够根据物体表面特征及对应色彩灵活分布三维点)、空中三角测量、光速法平差,获取被测物体点云及影像的外方位元素,从而建立三维点云与影像间的对应关系[8]。即通过二维影像获取空间三维结构信息,完成测量工作。其主要技术有以下3个特点。
1)多基线摄影方式。将原来按 “单模型”处理的交向摄影,拓展为多个模型的区域;将区域网空中三角测量由航空摄影测量引入 “近景摄影测量”, 由于 “多基线”, 可以实现 “全自动”处理。
2)拍摄多视角。空间一个点由多条光线交会而成,提高三维点精度;获取影像外方位元素,建立匹配点与影像间的对应关系,可快速获取空间任意点三维坐标;可通过特征点代替控制点,进行无接触测量,工作强度低、安全方便。
3)三维模型自动接边,影像与点云间自动映射,快速无缝完成真实纹理的三维建模;空三成果数据根据应用方向,可导入对应平台处理应用,可生成的测量成果包括三维点云、大比例尺地形图、立面图、真实三维纹理、正射影像等[9]。
2 实验与分析
针对某建筑物基坑的水平位移监测工作,编制传统监测方案并实施,同时编制数字近景摄影测量技术方案,并进行可行性研究,通过实测数据进行可靠性验证。
2.1 工程概况
某建筑物的基坑平面布置图如图1所示。
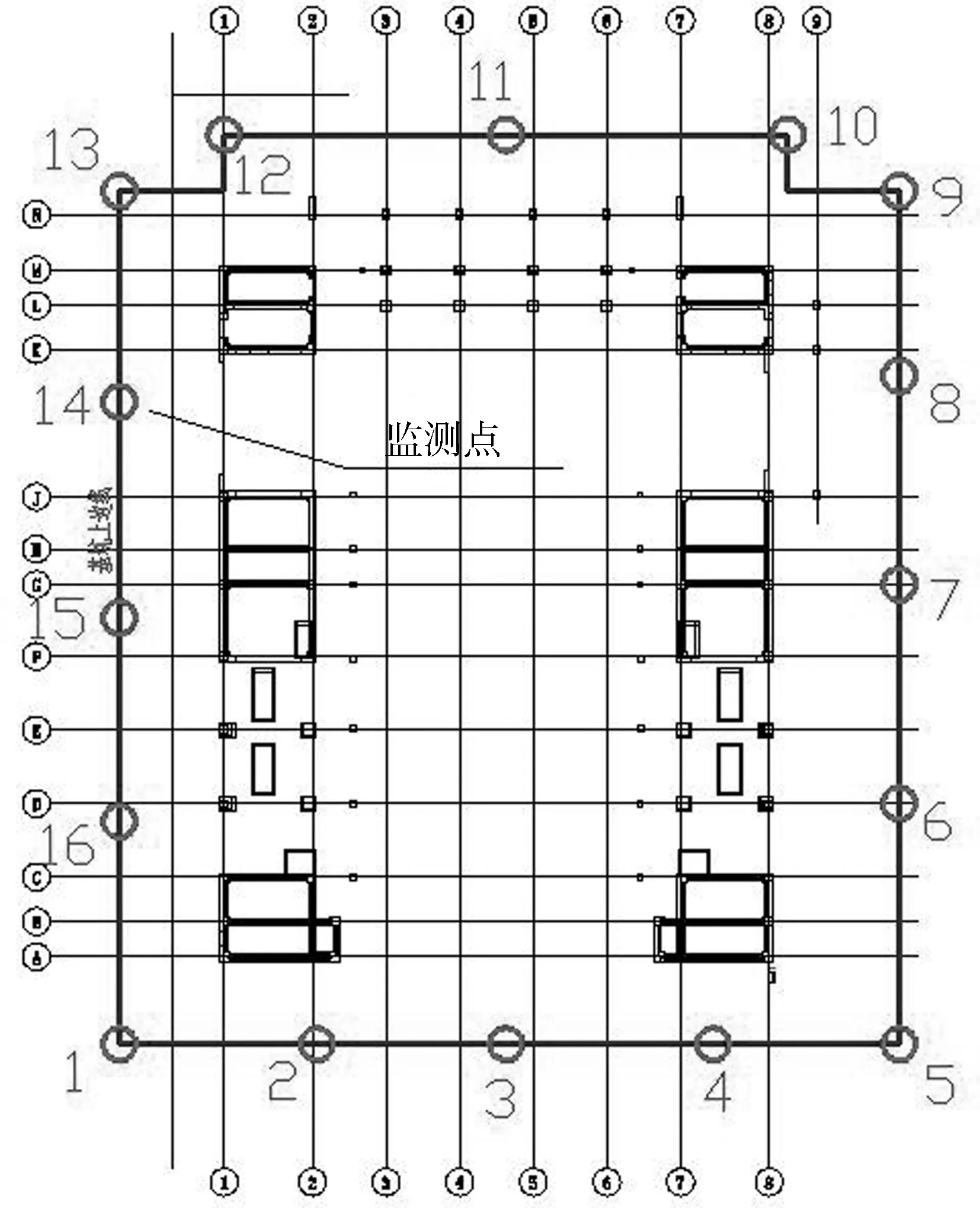
图1 基坑监测点位布设示意图
2.2 传统监测方案
坡顶水平位移监测网布设独立三角网,使用Leica TCA2003测量机器人配合反射小棱镜,测定监测点在独立坐标系下的坐标变化值,得出垂直于基坑边界的位移量[10]。共布设基坑顶部水平位移监测点16个。
根据监测点的直径,使用相应的钻头,在基坑坡顶打孔,然后用手锤将监测点打入孔洞内并浇筑混凝土,使之与坡体连为一体。施测时,在基坑周边选择一点作为设站点,经过设站点平行基坑变为X轴,垂直X轴且经过设站点为Y轴,以此建立监测坐标系,通过测量机器人自动观测反射小棱镜获取监测原始数据。变形速率的单位采用mm/d,计算结果精确到0.01 mm/d。
2.3 数字近景摄影测量方案
1)多基线数字近景摄影测量理论基础。
传统的近景摄影测量都是基于作业员的目视立体观测的模拟、解析摄影测量,它必须根据精度要求,考虑被摄对象的远景和近景,设计摄影基线和交向角,比较复杂。在内外作业时,一般采用非量测相机的直接线性变换进行(基于 “单基线”的双目视觉),需要不少于6个外业控制点,按单模型进行处理。文献[11]以计算机视觉代替人眼双目视觉的 “多基线、多影像近景摄影测量”理论,改变了传统近景摄影测量方式,彻底解决了交会角与匹配之间的矛盾,开发出了全新的多基线数字近景摄影测量系统。
多基线摄影测量突破传统的非量测相机的直接线性变换的要求,通过新的拍摄方式(旋转摄影和平行摄影)[12],能够直接利用航空摄影测量的自检校区域网平差,不仅无须进行核线排列,无须产生核线影像,而且通过新的影像匹配算法提高了匹配的可靠性[13]。
若测量误差为定值,则摄影测量前方交会的误差主要取决于交会角θ,交会角愈小,测量的Z轴(深度)误差愈大(即航空摄影测量的高程精度都低于平面精度),而交会角取决于摄影的重叠度,因此,如果利用加大重叠度到80%,相比于传统的60%重叠度[11],其交会角θ1就会增加一倍,在理论上精度可以提高一倍,如图2所示。交会角的大小也与影像的自动化匹配有关。交会角小则影像变形小,匹配易;交会角大则影像变形大,匹配难[14]。
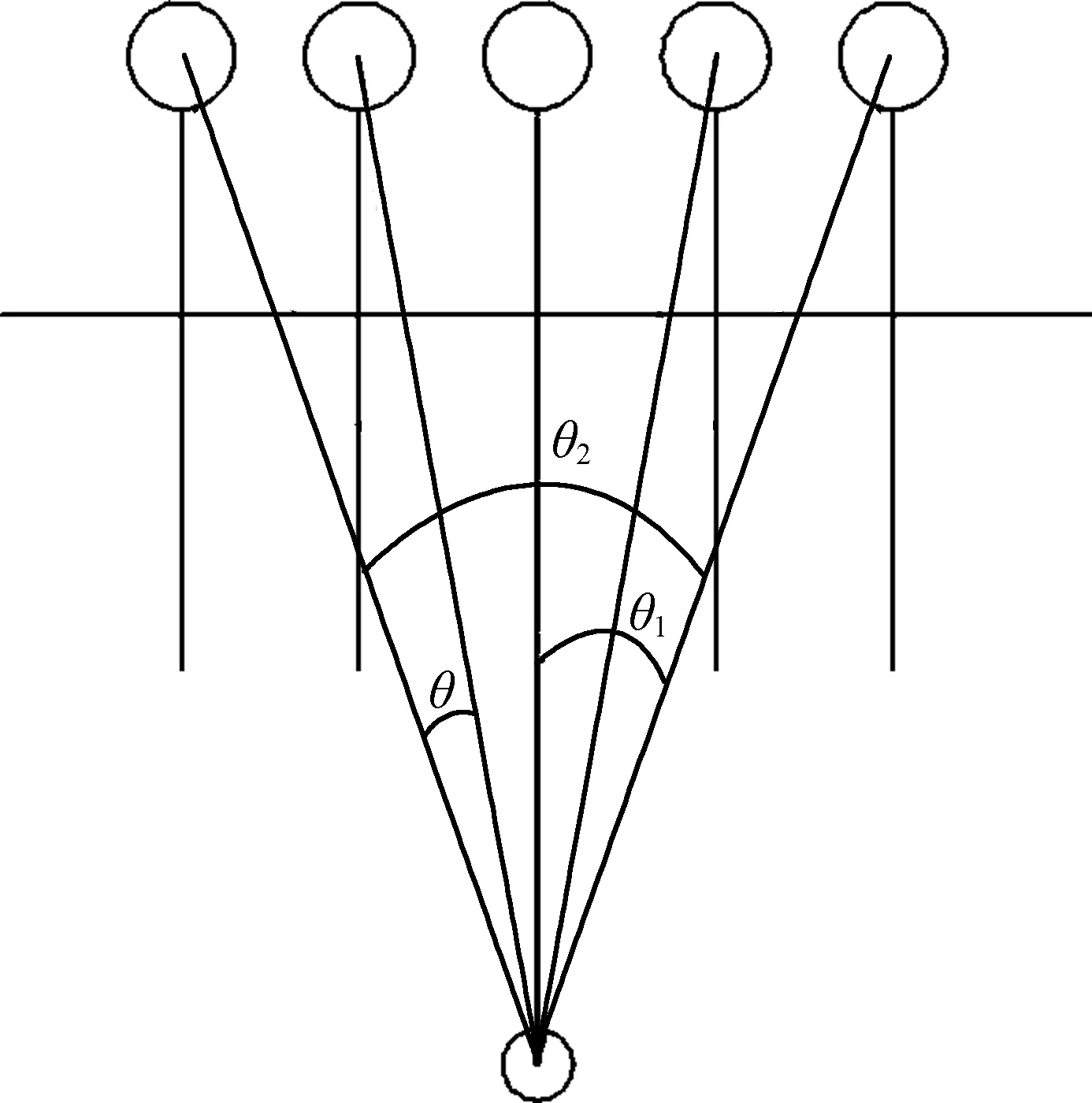
图2 多基线摄影测量
由上可知,交会角大小使得精度与影像的自动化匹配之间存在矛盾:交会角大精度高,交会角小易于匹配。多基线摄影测量是解决这个矛盾的最佳方法。相邻影像交会角θ小,易于匹配,多基线、总体交会角θ2大,可以确保交会精度,而多方向交会,可以使前方交会具有冗余观测,从而增加影像匹配的可靠性。
将整个基坑进行工程拆分,以每个面作为拆分单元,即形成4个单体工程(监测面)进行。在每个监测面布设4个像控点,使用Canon EOS 5D MarkⅢ单反数码相机拍摄监测面影像,并由全站仪获取像控点的坐标,通过软件系统对数据进行处理,建立监测区域立体模型。通过人工在影像中提取水平位移、竖直位移监测点的像方位置,应用空三成果及监测点的像方坐标自动计算对应监测点三维坐标。最终将每周期监测点进行对比分析,获取变化量,完成监测工作。数字近景摄影监测工作主要分为外业影像采集、像控点测量及内业影像处理和监测点坐标提取,内外业处理流程图如图3所示。

图3 数字近景摄影基坑监测内外业流程图
2)镜头焦距与拍摄距离。
根据拍摄位置与监测面的距离,选择合适的镜头,参考标准如表1所示。
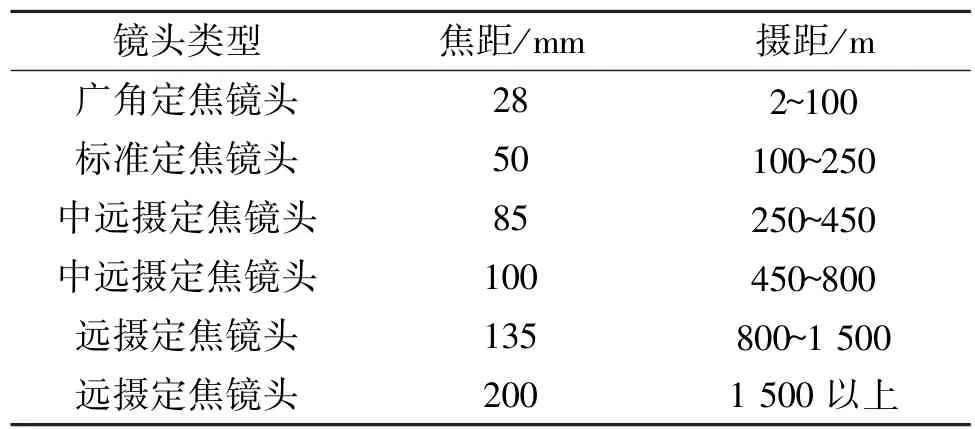
表1 镜头与摄距的关系
3)精度预估。
多基线数字近景摄影测量系统,在基坑水平位移监测领域还未有成熟的实施方案和工程案例。目前该系统主要应用于三维重建,在实际近距离项目工程中 (5~10 m),空三精度约为1 mm。根据基坑的实际现状,在保证影像重叠度、清晰度、拍摄角度等因素下,预估其空三精度约为3~5 mm。
3 方案实施及精度比对
根据硬件条件及基坑边坡监测精度要求,为保证拍摄影像的分辨率,实施区域为该建筑物基坑局部。根据拍摄距离,配备85 mm镜头进行影像拍摄。共采集8个外业控制点和2个原始监测桩三维坐标。拍摄区域如图4所示。

图4 某监测面拍摄区域全景图
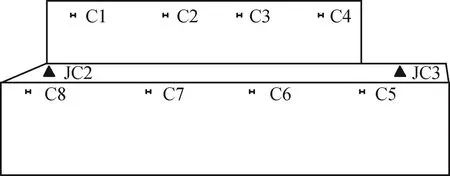
图5 拍摄区域控制点分布图
外业影像获取分别应用平行及旋转两种摄影方式。分别以 C1、C4、C5、C8为控制点,C2、C3、C6、C7为比对点,将全站仪采集三维坐标误差视为0。全站仪与系统提取三维坐标精度比对结果如表2所示。

表2 平行摄影坐标比对 (单位:m)
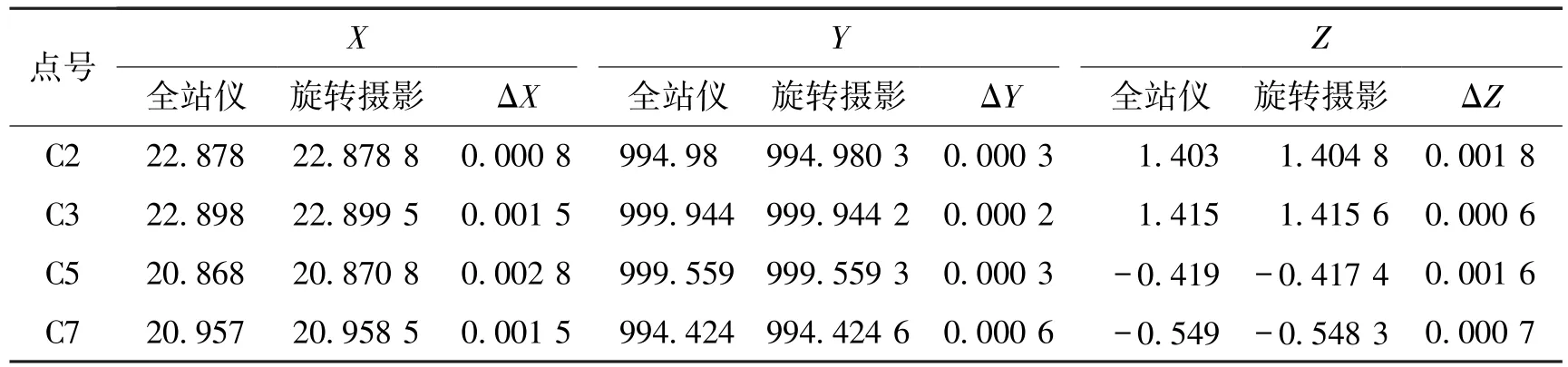
表3 旋转摄影坐标比对 (单位:m)
4 结束语
在精度方面,通过数据比较,验证了数字近景摄影测量方法在基坑监测中是有效和可行的,其无接触测量模式提高了作业安全性,较传统方法具有一定的优越性,尤其适合在监测点布设密度大,基坑工作环境恶劣的现场。该方法的适应性,关键在于能否布设合理数量的稳定可靠的控制点。下一步将针对控制点、相控点的不同布设方式对解算结果的影响规律进行研究。
[1]冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002.
[2]何晖,李栋栋,张少卫.基于小角法监测城市深基坑水平位移及精度分析[J].山西建筑,2014(27):60-62.
[3]张剑清,潘励,王树根.摄影测量学[M].武汉.武汉大学出版社,2003.
[4]张胜利,殷海霞,刘强.多基线数字近景摄影测量系统的应用分析[J].测绘技术装备,2009(1):27-30.
[5]RUINIAN J, DAVID V, JAUREGUI, K R W.Close -range photogrammetry applications in bridge measurement:Literature review[J].Measurement, 2008, 41(18):823-834.
[6]OHNISHI, Y, NIIDA H, RYU, M NAKAI, T.An application of key block analysis to large section tunnel excavation[J].Fourth International Conference on Analysis of Discontinuous Deformation, 2001:357-365.
[7]LEE,Y J BASSETT R H Application of a photogrammetric technique to a model tunnel[J].Tunnelling and Underground Space Technology, 2006, 21(1):79-95.
[8]OHNISHI Y, NISHIYAMA, YANOA, S T MATSUYAMA H,AMANO K.A study of the application of digitalphotogrammetry to slope monitoring systems[J].International Journal of Rock Mechanics & Mining Sciences,2006, 43(5):756-766.
[9]丁进选,王斌.多基线数字近景摄影测量在建筑立面提取中的应用[J].测绘通报,2012(6):47-50.
[10]江兴林,李利文,李超.异型基坑水平位移监测方法及数据处理[J].城市勘测.2013(1):149-151.
[11]张祖勋.多基线-数字近景摄影测量[J].地理空间信息.2007,5(1):1-4.
[12]张大春,陈以军.多基线数字近景摄影测量技术在铁路勘测中的应用研究[J].铁道勘察,2009(5):43-45.
[13]钟强.基于近景摄影测量技术的矿区边坡变形监测及应用[D].赣州:江西理工大学,2012.
[14]赵国强.基于三维激光扫描与近景摄影测量数据的三维重建精度对比研究[D].焦作:河南理工大学,2015.
猜你喜欢
科学(2022年4期)2022-10-25
青年文学家(2021年1期)2021-03-24
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
工程与建设(2019年2期)2019-09-02
当代水产(2019年1期)2019-05-16
舰船电子对抗(2016年5期)2016-12-13
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27
航天器工程(2014年5期)2014-03-11
