
控制类多学科融合虚拟仿真教学资源建设
2018-07-03 07:20白瑞峰于赫洋靳荔成韩洪洪
实验技术与管理 2018年6期
白瑞峰, 于赫洋, 靳荔成, 韩洪洪
(天津大学 电气与自动化工程学院 电气工程与自动化国家级虚拟仿真实验教学中心, 天津 300072)
从“复旦共识”到“天大行动”,再到“北京指南”,新工科建设“三部曲”起承转合、渐入佳境。在新工业革命加速进行中,新工科建设势在必行[1]。工程教育在我国高等教育中占有重要地位,高素质工程科技人才是支撑产业转型升级、实施国家重大发展战略的重要保障。在“互联网+”和《中国制造2025》计划的时代背景下,高校应主动服务国家战略需求,主动服务行业企业需要,加快建设新工科专业,打造“卓越工程师教育培养计划”的升级版[2],探索“新工科”背景下创新工程教育与实践教学资源建设,最终形成中国特色、世界水平的工程教育体系。由于计算机控制系统、过程控制系统、运动控制系统、现代控制原理、智能控制等控制类学科紧密贴近工程实际,涉及广、交叉大,同时也是电气信息类专业核心课程[3-4],所以涉及控制类多学科融合的综合实践教学资源越来越受到重视。
为更好地推进课程教学内容的理解,有必要搭建一个融合多课程内容、虚拟实验与实际实验相结合的综合实验教学系统,从而有效地帮助学生将理论学习与实验实践有机结合,培养创新意识和提高创新创业能力[5-6]。
依据实践教学规律和自动化专业过程控制、运动控制、计算机控制等控制类课程需求,将虚拟仿真技术和互联网技术应用到控制系统设计、控制系统网络构建、机器人控制和智能制造等实践教学内容中,并构建控制类多学科融合实验教学系统。该系统包括虚拟仿真实验教学管理与共享平台,可完成实体实验及虚拟实验教学与管理;还包括工业机器人控制系统构建和过程控制系统构建虚拟实验、DCS网络实验等内容。该系统中的资源覆盖了过程控制、运动控制、计算机控制所需的实验教学内容,且各有所侧重,同时也涉及先进过程控制、控制网络、机器人技术、智能制造等科技前沿技术,旨在为自动化专业本科生提供从系统建模、PID整定、控制系统设计、控制网络设计和智能制造系统构建的完整实践教学平台。
1 工业机器人控制系统构建
工业机器人控制系统构架是在原有RV-F三菱机器人的基础上,引入了Visual Components开源机器人虚拟仿真环境,其网络结构如图1所示。该控制系统包括含有机械手的3D虚拟对象、三菱Q系列PLC及MES系统、Web服务器和数据库服务器等。终端用户可通过访问服务器控制PLC,通过CC-Link现场采集监控实际对象,也可与虚拟对象通信。
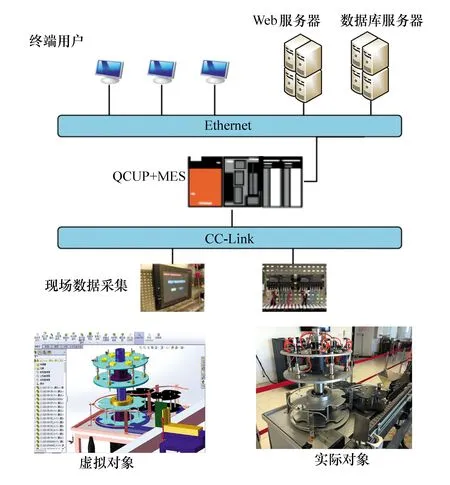
图1 工业机器人虚拟实验系统结构图
实验系统与服务器的网络管理平台集成,学生可通过互联网远程完成实验项目。如图2所示,学生可通过互联网访问服务器,调用虚拟对象进行生产线的工艺设计,同时该虚拟环境支持SolidWorks,允许自主设计模型。利用GX-Works2对PLC进行编程,从而控制3D虚拟对象。利用Visual Components(VC)搭建的虚拟对象代替了机械对象,可与真实PLC数据交互。学生通过真实的PLC实现对虚拟对象中机械手、电机、阀门等执行器的控制。生产线以及数据库的信息与PLC通信通过MES模块实现。
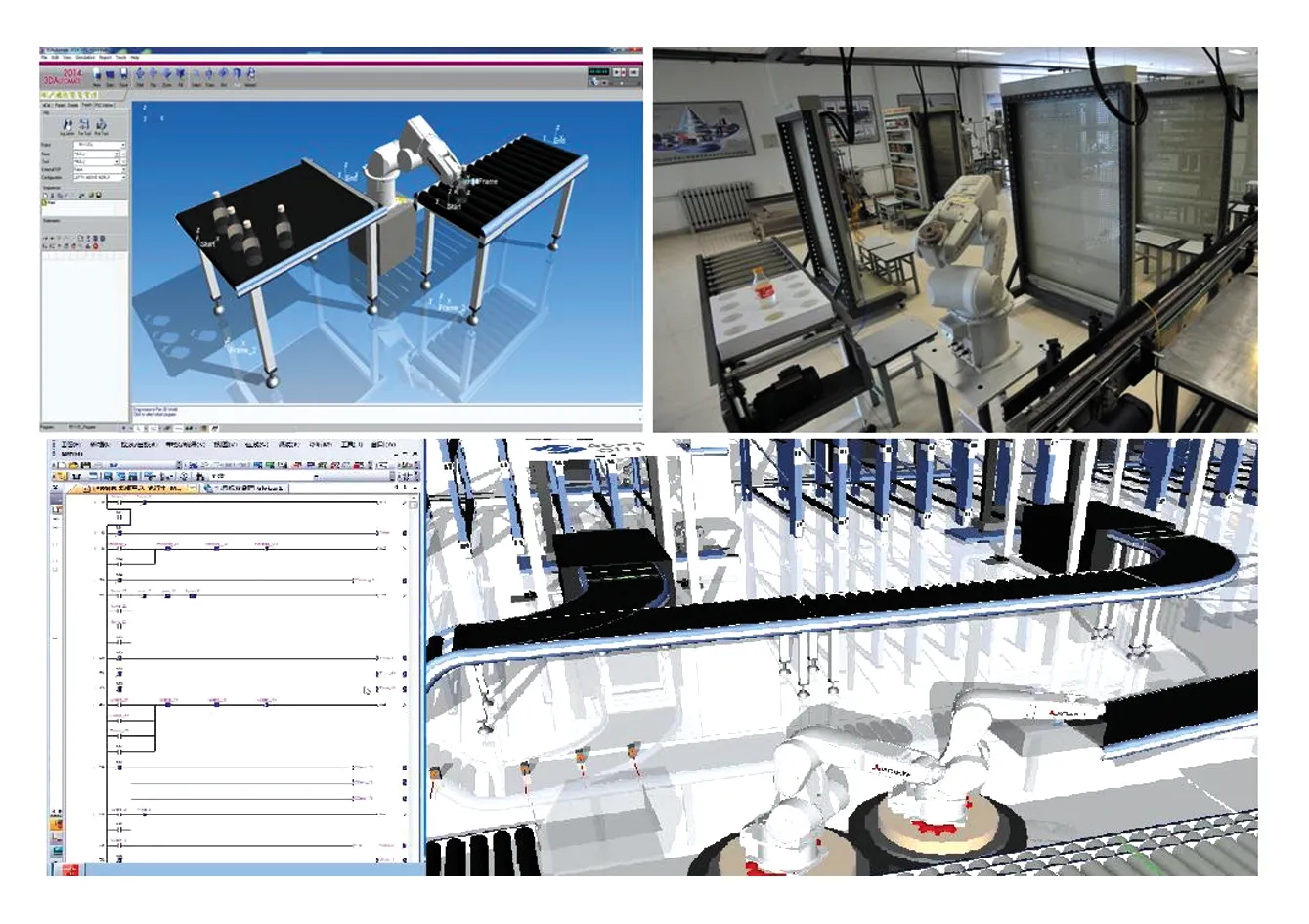
图2 工业机器人虚拟仿真实验
该实验系统与实际设备相对应,为学生提供更加优质的教学资源环境,扩大了教学资源共享范围。学生可选择不同的虚拟仿真机器人对象并设计机器人动作,以完成不同任务。也可实现虚拟设备和真实设备的通信,为虚实结合的实验教学内容提供基础。依托该平台,我校学生已申请国家大学生创新训练项目3项,获得“三菱电机杯”全国大学生自动化大赛等科技竞赛奖项10余项。
2 构建过程控制系统虚拟实验
该实验基于过程控制系统的典型被控对象液位对象构建,系统结构如图3所示。系统包括实际被控对象、虚拟被控对象以及LabVIEW开发的人机交互及登录配置模块、控制算法及仿真模块、SoftMotion模块[7]、数据采集模块等。
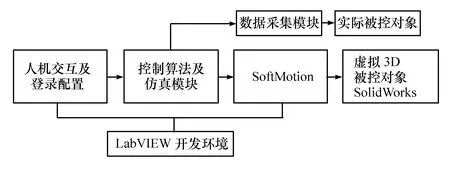
图3 构建过程控制系统虚拟实验系统结构图
构建过程控制系统虚拟实验能够完成过程控制虚拟实验和实体实验,液位过程控制系统构建、一阶和二阶对象建模、PID工程整定以及先进过程控制等,是控制思路、控制策略和控制方法等创新实验的基础。
该实验系统通过LabVIEW与SolidWorks的开源环境自主开发设计,可进行三维可视化图形仿真,为学生提供清晰、逼真的3D效果。系统设计采用“被控对象+控制”的基本架构和模块化开放的设计理念。LabVIEW完成控制算法及仿真模块通信,可实现PID控制,学生也可通过该算法模块完成其他先进过程控制的设计。数据采集模块选用NI-6259[8],通过数据采集模块实现对实际对象的控制。3D虚拟对象通过SolidWorks设计实现,结合SoftMotion完成3D虚拟对象与LabVIEW控制算法及仿真模块的通信,从而搭建起完整的虚拟仿真实验平台。
图4(a)为实体实验对象,包括二阶水槽、差压变送器、电动调节阀、涡轮流量计及相关的显示仪表,图4(b)为利用SolidWorks实现的虚拟被控对象,其组成、尺寸与实体对象一致。
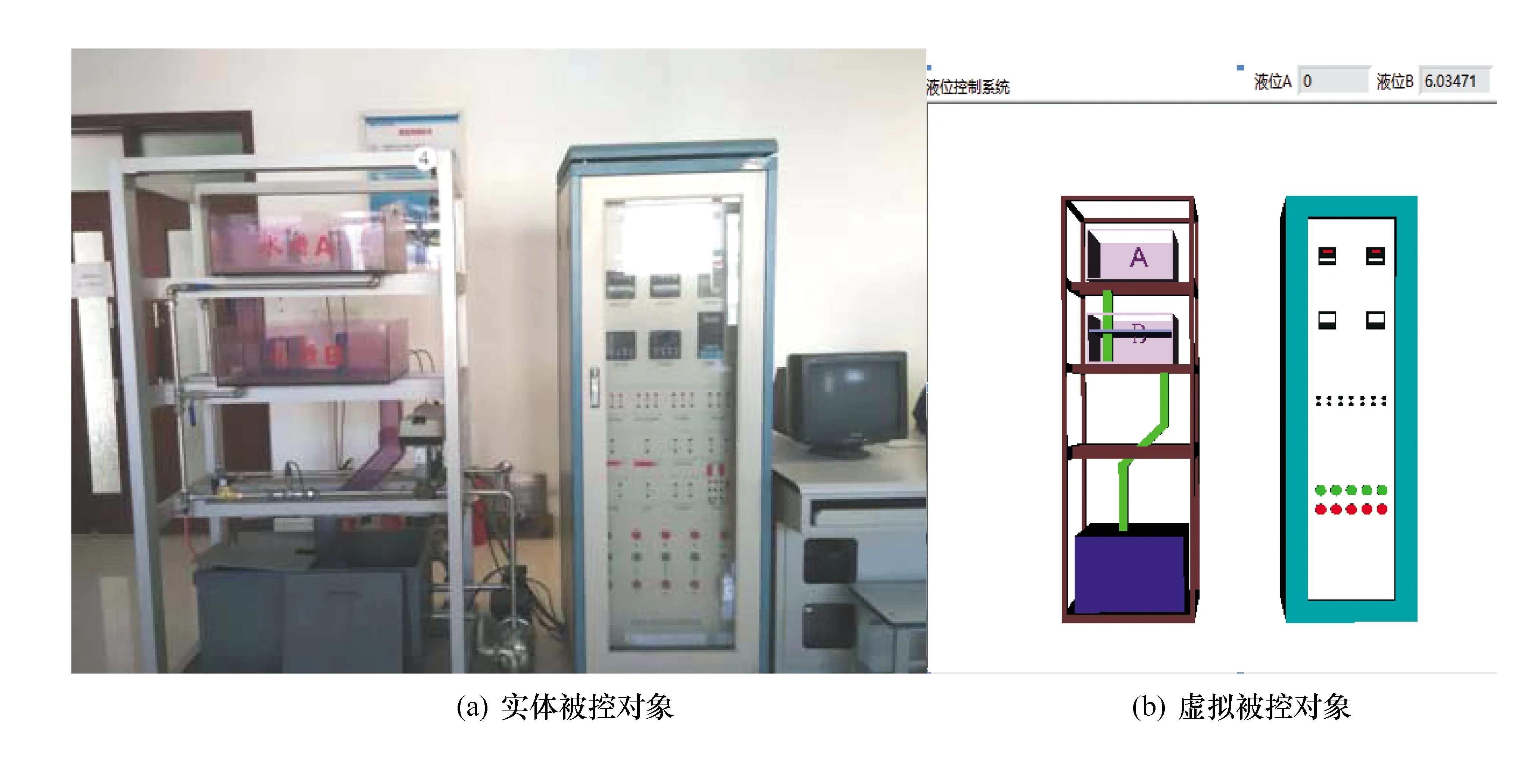
图4 过程控制系统被控对象
在被控对象中,水槽可简化为惯性环节数学模型[9]。针对实体被控对象,在不同的工作点通过响应曲线法进行建模,实验界面如图5所示。可通过选单选取一阶控制系统建模、一阶控制系统PID整定、二阶控制系统建模、二阶控制系统PID整定以及创新控制策略等实验。图5中,左侧为3D显示界面,可直观看到虚拟被控对象的变化以及相关仪表的显示状态,右侧为实验区域,包括参数设定、曲线显示以及实验结果等。

图5 实验界面
3 DCS网络虚拟实验
根据专业培养目标要求,自动化专业本科生应具备控制系统设计与调试的能力,还需要掌握DCS、CC-Link、Profidbus等控制系统的网络架构[10],而这对于刚完成理论课学习的本科生来说,略感吃力。针对控制网络的构建实践教学需求,开发了DCS网络虚拟实验。在网络的环境下,学生可完成DCS网络构建、过程控制对象的建模和整定等实验内容。
该实验基于VB和KingACT自主开发,采用开放式、模块化的设计思路,在KingACT[11]中分别建立对象模型程序和控制器模型程序,通过VB编程环境分别建立对象界面和控制器操作界面,利用OPC服务器完成VB程序和KingACT的数据交互。
DCS网络虚拟实验的网络结构如图6所示。实体的控制器与被控对象均设有网络接口,可与操作员站和工程师站进行通信。操作员站计算机运行VB程序,可完成虚拟或者实体的控制器和被控对象的监控;虚拟控制器和虚拟被控对象可由运行KingACT的计算机实现,同时在该计算机上启动KingACT的OPC服务器。

图6 DCS网络虚拟实验的网络结构
OPC服务器[12]近似于实体对象中传感器和执行器之间的信号连接,可实现控制信号与控制对象参数信号连接。通过该实验,学生可完成DCS网络构建以及虚拟、实体的实验内容。
4 管理与共享平台
为了对实验教学资源进行有效管理,提高应用效果和共享范围,构建了虚拟仿真实验教学管理与共享平台。虚拟仿真实验教学管理与共享平台是基于J2EE架构的B/S结构[13],如图7所示。
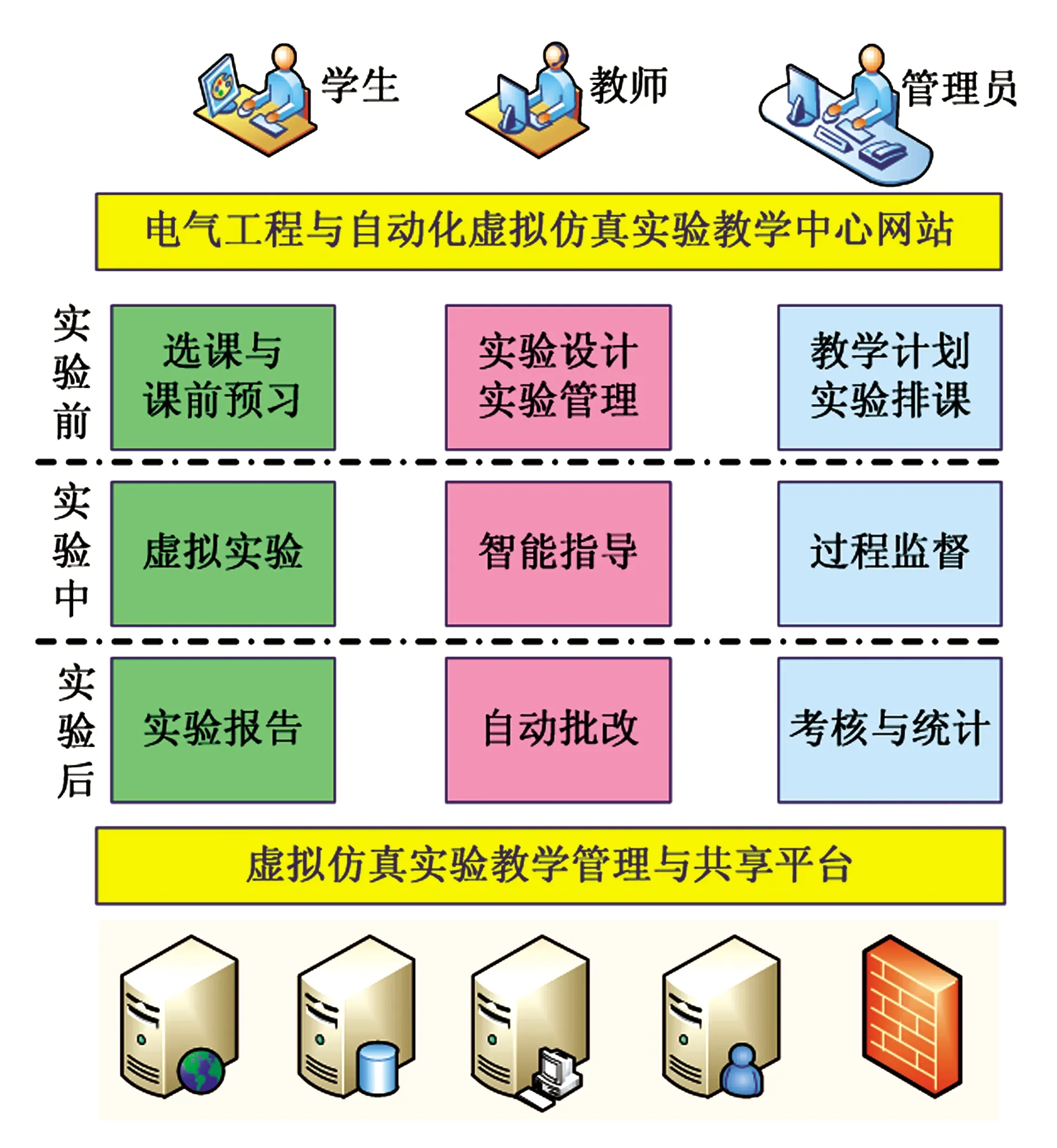
图7 虚拟仿真实验教学管理与共享平台结构图
该平台覆盖实体实验、虚拟实验、基础实验、创新创业实验等多层次的实验教学内容。此外,该平台遵循资源共享,重视科研成果向教学的转化及校企合作,让更多的本科生提前了解学科及行业前沿,对全面提升学生综合素质具有重要意义。
5 结语
面向新工科实践教学,紧密结合电气信息类学科及工业发展的机器人技术、智能制造、网络控制等前沿技术,构建了控制类多学科融合虚拟仿真实验教学系统。该教学资源扩充过程控制、对象模型测取及PID整定、控制网络、机器人技术以及智能制造等方面的实验教学内容。该平台的构建融合了过程控制、运动控制、计算机控制等控制类核心课程,打破独立课程的教学“孤岛”,涵盖了从基本原理验证、设计性开放性实验,到科技前沿学科竞赛等教学需求。该平台丰富了工程教育培养手段,填补、充实了本科生实践教学内容,为新工科背景下的实践教学、多层次教学奠定了基础。
[1] 钟登华.新工科建设的内涵与行动[J].高等工程教育研究,2017(3):1-6.
[2] 胡波,冯辉,韩伟力,等.加快新工科建设,推进工程教育改革创新:“综合性高校工程教育发展战略研讨会”综述[J].复旦教育论坛,2017,15(2):20-28.
[3] 包广清,吴延明,杨新华.面向工程实践的运动控制系统综合训练改革[J].实验技术与管理,2014,31(4):150-153.
[4] 白瑞峰,韩洪洪,于赫洋,等.智能制造虚拟实验系统设计与集成[J].实验技术与管理,2016,33(6):129-131,149.
[5] 王卫国,胡今鸿,刘宏.国外高校虚拟仿真实验教学现状与发展[J].实验室研究与探索,2015,34(5):214-219.
[6] 闫绍峰,廖国进,曾红.基于CDIO工程教育理念的实践教学培养模式探索与实践[J].实验室科学,2015,18(4):101-103.
[7] 武文佳.基于SolidWorks&LabVIEW的虚拟原型机电一体化设计技术研究[D].西安:西安电子科技大学,2012.
[8] Badillo I, Jugo J, Portilla J, et al. PXIe-Based LLRF Architecture and Versatile Test Bench for Heavy Ion Linear Acceleration[J].IEEE Transactions on Nuclear Science,2014,62(3):963-971.
[9] 叶昊,侯艳,马光.动态矩阵算法在水箱液位控制中的应用[J].自动化仪表,2015,36(3):32-35.
[10] Hu J, Zhang L, Wang Y. A Systematic Modeling of Fault Interdependencies in Petroleum Process System for Early Warning[J].Journal of Chemical Engineering of Japan, 2015,48(8):678-683.
[11] 李现坤.基于PC-Based Control和现场总线技术的DCS研究[D].南京:南京理工大学,2005.
[12] 赵晓峰.基于OPC技术的Web工控系统的研究与实现[J].自动化与仪表,2016(2):62-64.
[13] 傅启明,康永.J2EE架构的B/S系统监控平台[J].计算机系统应用,2015,24(6):81-84.
猜你喜欢
湖南税务高等专科学校学报(2021年4期)2021-08-30
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
意林(2018年3期)2018-03-02
厦门理工学院学报(2016年1期)2016-12-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
