
太阳能混合动力系统综合实验平台设计与实施
2018-07-03 07:19贺云涛张晓辉王正平
实验技术与管理 2018年6期
刘 刚, 贺云涛, 张晓辉, 王正平
(北京理工大学 宇航学院, 北京 100081)
太阳能具有环保、安全、无污染及可再生的特点,且储量巨大,是低碳社会理想的新能源之一[1-2]。太阳能电池是一种利用光电效应直接把光能转化成电能的装置,它的出现使得对重量和能源均比较敏感的无人机得到了新的发展[3-5]。近年来,以太阳能为主要动力的无人机航时记录不断被刷新[6]。由于太阳能电池是一种非线性电源,其输出特性随负载和外部环境变化剧烈,且存在最大功率点,因此在太阳能动力系统中最大功率点跟踪(maximum power point tracking,MPPT)十分重要[7-10]。
为加深本领域学生对绿色能源动力系统的掌握和了解,设计和开发了无人机太阳能混合动力综合实验平台。该实验平台以固定翼无人机为原型,能够模拟无人机从起飞到降落的整个工况,并对动力系统各节点的电流电压进行采集和记录,便于对不同工况下的能源分配情况以及MPPT控制器工作状态进行分析。
1 整体方案设计
太阳能混合动力综合实验平台包括太阳能电池、锂电池、MPPT控制器(市售产品)、电子调速器、无刷直流电机及螺旋桨、电流电压采集模块、控制记录模块等,系统结构框图见图1。由于太阳能电池易受环境影响,因此为充分发挥太阳能电池的作用,本系统在太阳能电池后串接MPPT控制器以实现最大功率输出。本系统采用被动式能源功率分配结构,MPPT控制器的输出和锂电池的输出直接并联到一起,同时为系统负载供电。系统负载选用涵道电机搭配涵道风扇式螺旋桨,既能反映实际飞行负载状态又具有较高的安全性。控制记录模块由电子调速器内置的稳压电源进行供电,同时向电子调速器发送油门控制指令。控制记录模块为电流电压采集模块供电,并以100 Hz频率对3个电流电压采集模块的结果进行记录,保存到SD卡中。

图1 太阳能电池/锂电池混合动力综合实验平台结构框图
2 硬件电路设计
硬件电路包括电流电压采集模块和控制记录模块。
2.1 电流电压采集模块
电流电压采集模块电路见图2。Allegro ACS758系列电流传感器芯片为交流或直流电流检测提供经济和精确的解决方案,广泛应用于电机控制、负载检测和管理、电源和DC-DC转换器控制、变频器控制和过电流故障检测等领域[11]。该器件由精密的低失调线性霍尔电路组成,有安装方便、噪声低、可靠性高、功耗超低(100 μΩ导通电阻)、低输出电压纹波、低失调漂移、出厂校准等特点,且导电路径端子与信号线互相隔离,从而可直接应用于高压条件,非常适合本系统应用。
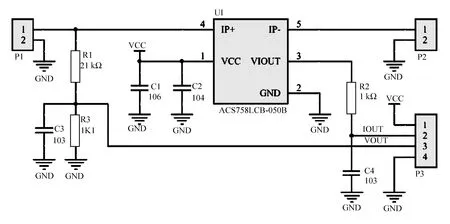
图2 电流电压采集模块电路
为保证系统稳定性及测量冗余度,选用双向、量程为50 A、灵敏度为40 mV/A电流传感器,在传感器输出端加入一阶RC滤波电路以降低输出噪声。电压采样选用常用电阻分压形式,电阻网络分压比为1.1∶(1.1+21)≈0.049 77,最高可支持66 V直流电压输入,同时在输出端并接电容以降低输出噪声。
2.2 控制记录模块
控制记录、模块电路框图见图3。STM32系列微控制器基于ARM Cortex-M3内核,是意法半导体集团推出的专为要求高性能、低成本、低功耗的嵌入式应用所设计[12]。STM32F103作为STM32的增强型子系列,最高工作频率可达72 MHz,拥有512 KB闪存以及64 KB的SRAM,内 置3个12位的微秒级模数转换器(analog- to-digital converter,ADC),还拥有2通道数模转换器(digital-to-analog converter, DAC)、12通道DMA(direct memory access)控制器、多达11个定时器、多达13个通信接口等,因此控制记录模块选用STM32F103作为主控制器。
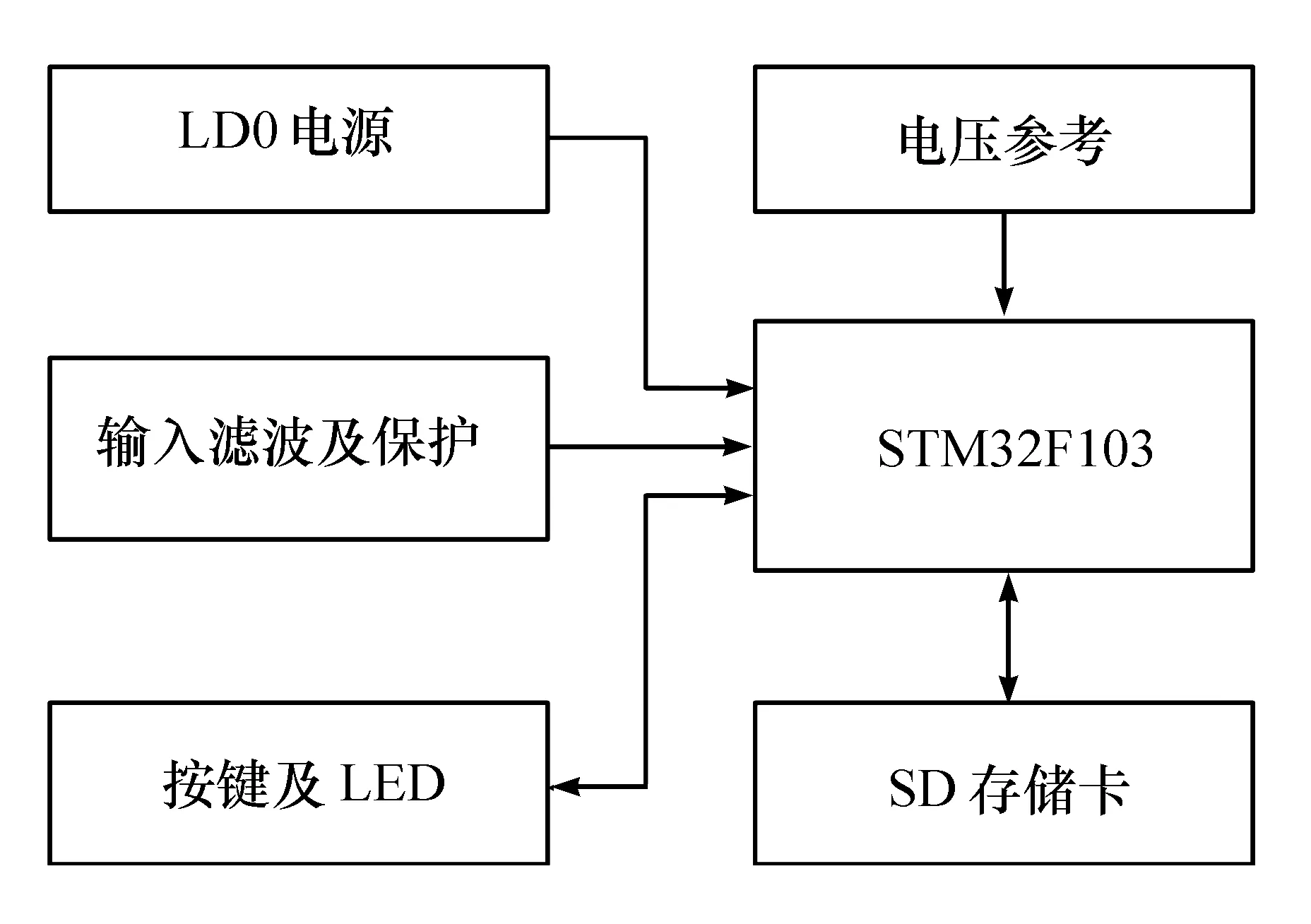
图3 控制记录模块电路框图
控制记录模块由电子调速器输出的5 V稳压电源进行供电,由于微控制器供电电压为3.3 V,因此还需设计3.3 V稳压电源。低压差(low dropout, LDO)线性稳压器与开关电源相比,具有输出纹波小、稳定性高、静态电流小等优点,特别适用于功率需求不大但对品质要求较高的场合[13]。由于电流电压信号均为模拟量,均须进行AD转换,而AD参考电压精确度又能直接影响AD转换精度,因此为提高测量精度、减小系统误差,加入精密电压参考源作为AD转换器的参考电压。输入滤波及保护电路用于对输入信号再次进行滤波减小传输干扰,同时对输入信号进行限幅限流,防止接线错误串入高电压对控制记录模块造成不可逆损坏。STM32F103自带SDIO接口,加入必要外围电阻,即可实现SD卡的读写[14]。
3 控制程序设计
3.1 系统主程序流程
系统主程序流程图见图4。系统上电后首先进行自检和初始化,对实时时钟、定时器、AD转换器以及SD存储卡进行初始化工作,若初始化失败则进行LED报错,若初始化成功则进行油门行程校准。由于不同电子调速器默认的油门行程不同,所以为实现无刷直流电机的精准控制,在使用之前需要对电子调速器油门行程进行校准。油门行程校准完成之后,系统进入就绪状态,循环进行按键扫描,等待实验开始信号。
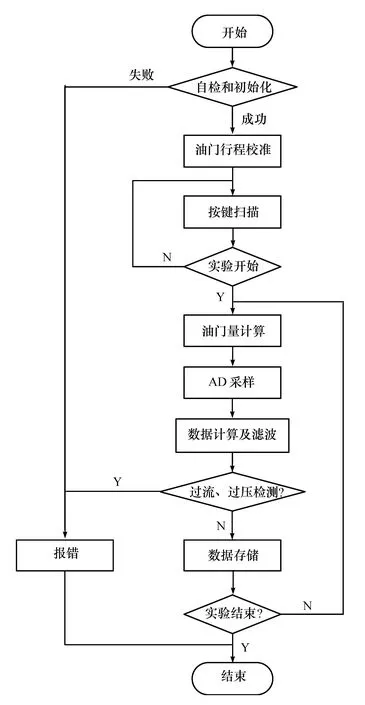
图4 系统主程序流程图
系统就绪后,若按下开始按键,则实验开始。首先,根据提前输入的工况信息,计算此时的油门量并输出;然后进行AD采样,采集6通道模拟信号;根据各通道对应关系,计算实际电压、电流数据并进行平滑滤波;数据计算完成之后,进行过流、过压检测,检查系统各部分是否存在异常,若检测到异常则输出最低油门信号立即停止实验;若系统状态正常,则将电流、电压数据存入SD卡;最后判断实验是否结束,若实验结束则停止实验,若未结束则继续循环执行以上步骤直至实验结束。
3.2 油门量计算函数
本实验系统以固定翼无人机为原型,模拟固定翼无人机的飞行工况进行油门量的输出,整个过程持续440 s,输出油门量随时间变化如图5所示。油门量计算函数为分段函数,首先模拟无人机滑跑起飞并爬升,此时油门量从0逐渐增加到90%并维持;爬升到一定高度后进行平飞,油门量从90%降低到70%;平飞一段时间后进行盘旋,此时油门量呈现幅值为10%的正弦曲线;盘旋转平飞后突遇强风,油门量发生突变;最后滑跑降落,油门量从70%降低到0。
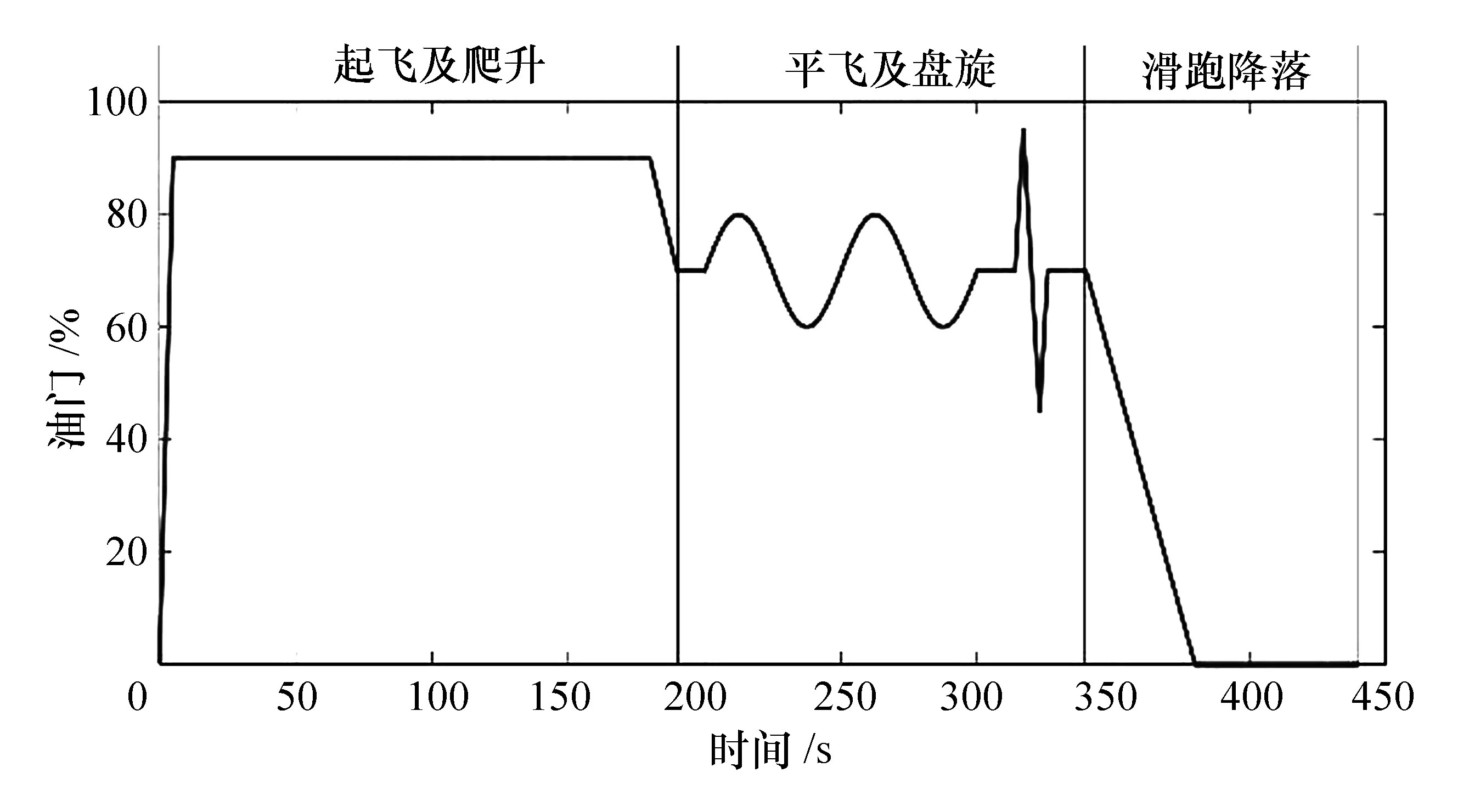
图5 油门量-时间曲线
4 实验及测试
实验条件:锂电池选用格氏3 300 mA·h 3S锂电池,太阳能电池选用型号为MLT200-72(具体参数见表1),实验时太阳光照强度962 W/m2,温度13 ℃。
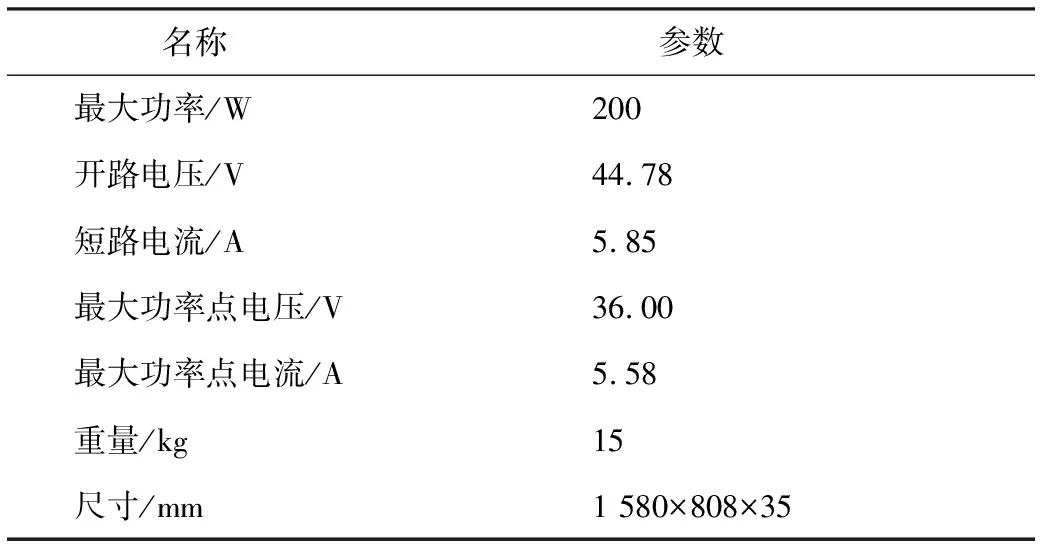
表1 太阳能电池参数
实验结果如图6所示,蓝色代表太阳能输出,红色代表MPPT控制器输出,黄色代表锂电池输出。从电压、电流和功率曲线不难发现,在实验开始阶段,太阳能电池即达到该状态下的最大输出功率140 W并维持输出,而锂电池则补充剩余功率;当需求功率小于太阳能电池最大输出功率时,锂电池停止输出并进入充电状态;当太阳能电池输出功率小于最大功率时,太阳能电池偏离最大功率点,降低输出功率;在实验最后阶段,油门回零,太阳能电池为锂电池充电,充电电流为4 A。整个实验过程中,MPPT控制器转换效率在82%左右。
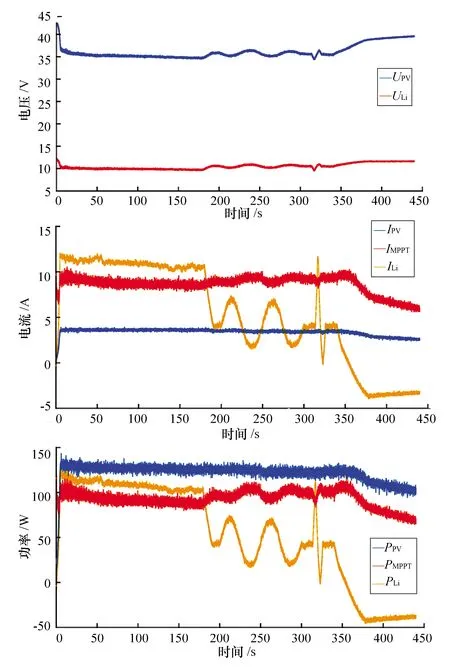
图6 实验结果
5 结语
测试实验结果表明:本实验平台运行稳定、数据记录精度较高、能够较好地反映混合动力系统在无人机各个工况下的能源消耗及分配状态。本实验平台已在我校开设的公共选修实验课“绿色能源飞行器总体设计”课程实验中得到应用,教学效果良好,具有相关领域推广价值和应用前景。本平台也具有在电动汽车等相关领域推广价值和应用前景。
[1] 张磊, 赵明冬. 光伏并网发电实训平台研制与应用[J]. 实验技术与管理, 2017, 34(1):109-113.
[2] 陈启卷, 周元贵, 何昌炎,等. 储能型光伏发电系统实验平台研究[J]. 实验技术与管理, 2015, 32(9):68-71,79.
[3] 李崇华. 太阳能电池工作原理与种类[J]. 电气技术, 2009(8):128-130.
[4] 杨晔, 张建, 唐特. 小型太阳能手机充电站的设计与实现[J]. 电子制作, 2015(8):56.
[5] 梁婷. 太阳能电池的研究现状及发展[J]. 电子世界, 2014(22):291-291.
[6] 王大勇, 李悦霖. 高空长航时无人侦察机关键技术[J]. 飞航导弹, 2009(11):31-35.
[7] 周令琛, 王晓伟. 太阳能发电最大功率点跟踪装置的设计与实现[J]. 上海第二工业大学学报, 2009(3):176-182.
[8] 马永红, 鲁宝春, 陈明丰. 改进的光伏发电最大功率间歇式扰动跟踪算法研究[J]. 辽宁工业大学学报(自然科学版), 2013(2):71-74.
[9] 徐敏, 阮新波, 刘福鑫,等. 氢光联合供电系统的能量管理[J]. 电工技术学报, 2010(10):166-175.
[10] 李志军, 刘爽, 张轩涛,等. 基于LabVIEW的虚拟光伏实验系统设计[J]. 实验技术与管理,2016,33(5):105-108,112.
[11] 龚思远, 杨鹏, 宋亮,等. 基于DSP的直流电流采样系统设计[J]. 微计算机信息, 2008 (5):145-146.
[12] 于博. 意法半导体推出全新32位ARM Cortex微控制器[J]. 中国电子商情(基础电子), 2012(10):24.
[13] 董行彪, 陈国通, 成传湘. DC-DC电源的应用设计研究[J]. 电脑知识与技术, 2014(11):2656-2659.
[14] 马丽娟. 便携式多点温度同步采集系统设计[J]. 山西电子技术, 2011(4):14-15.
猜你喜欢
科学大众(2022年23期)2023-01-30
今日农业(2022年14期)2022-09-15
军事文摘(2022年14期)2022-08-26
科学大众(2021年21期)2022-01-18
小学科学(学生版)(2021年12期)2021-12-31
岷峨诗稿(2020年4期)2020-11-18
汽车电器(2018年8期)2018-08-25
小哥白尼(趣味科学)(2018年4期)2018-06-21
汽车之友(2016年10期)2016-05-16
少儿科学周刊·儿童版(2015年7期)2015-11-24
