
A risk-based methodology for the optimal placement of hazardous gas detectors☆
2018-06-29 09:16KangCenTingYaoQingshengWangShengyongXiong
Kang Cen *,Ting Yao ,Qingsheng Wang *,Shengyong Xiong
1 School of Civil Engineering and Architecture,Southwest Petroleum University,Chengdu 610500,China
2 Department of Fire Protection&Safety and Department of Chemical Engineering,Oklahoma State University,Stillwater,OK 74078,USA
3 Wanzhou Branch Plant of Chongqing General Natural Gas Purification Plant,Southwest Oil&Gasfield Company,PetroChina,Wanzhou,Chongqing 404001,China
1.Introduction
Hazardousgas detection is an essential layer of protection in process industries.Its principal function is to effectively detect hazardous gas accumulation before it reaches a specific concentration and size and to initiate proper emergency response procedures.Hazardous gases can be classified into two main categories: flammable and toxic gases.The catalytic and infrared gas detectors are commonly used to detect flammable gas clouds,whereas the electrochemical and semiconductor gas detectors are typically designed to be activated at the tolerable toxicity level of a gas toxic to human health.When there is a possibility of a mixed release of flammable and toxic gases,both types of gas detectors should be present to protect against catastrophic accidents in terms of human health,structural safety,and surrounding environment[1].
Although effective detection technology currently exists for hazardous gas releases and a majority of process installations may have hundreds of sensitive detectors in place,the actual effectiveness of gas detection systems is still not satisfactory[2].For example,the Health and Safety Executive(HSE)[3-4]reported that less than 50%of the known releases in offshore facilities were successfully detected by the facility's gas detection system.This failure is due to the wide range of uncertainties that can affect the performance of gas detection systems,including the leak location,process condition,product composition and phase,and surrounding geometry as well as weather conditions[5-7].
General guidelines for the design of gas detection systems have been provided by several existing regulations,standards,and recommended practices[8-16].However,most of these guidelines focus primarily on type selection,installation,testing,and calibration of gas detectors whereas very little research provides explicit guidance in optimizing placement[17].Due to the generality of existing standards and the inherent uncertainties in gas detection,qualitative placement approaches based on rules-of-thumb and prescriptive procedures are typically adopted in modern process industries.According to the primary intended purposes,the placement strategies can be categorized into five classes,namely,source monitoring,volumetric monitoring,enclosure monitoring,path of travel and target receptor monitoring,and perimeter monitoring[18].The detection performance metrics,such as the distance from leak sources and the maximum volume uncovered,are widely used to assess the effectiveness of gas detector system.
In recent years,risk concepts and gas dispersion modeling based on computational fluid dynamics(CFD)have been introduced to above qualitative approaches to improve the detection performance.For example,Strøm and Bakke[19]proposed a performance-based algorithm for sensor placement where potential sensor locations are selected according to the ranking of an overall efficiency metric.DeFriendet al.[20]presented a five-step procedure based on risk evaluation to determine the maximum gas cloud size that must be detected to maintain a tolerable risk level.ISA-TR84.00.07[14]developed a coverage-based risk assessment procedure for gas detector placement.If the expected risk threshold is not met,the placement scheme of the gas detectors has to be modified,and the process is repeated.Mariottiet al.[21]developed a heuristic approach to allocate flammable gas detectors with the objective of maximizing the detection coverage.Richartet al.[22]presented a CFD-based approach to estimate gas dispersion and then to obtain the optimal gas sensor allocation.Wanget al.[23]proposed a meta modeling strategy using Gaussian process regression to reduce the number and required time of CFD simulations by selecting a reduced set that is sufficient to build an approximated model.In the previous studies,commercial packages,such as FLUENT,CFX,FLACS,and PHAST,have often been used to perform gas dispersion modeling.
More recently,Legget al.[6]developed a stochastic mixed-integer linear programming formulation for optimizing the placement of gas detectors.It aims to minimize the detection time for a given set of release scenarios based on a coverage constraint.To improve the tail behavior,Legget al.[24]extended their previous work and added an additional constraint on the conditional-value-at-risk function across the entire set of leak scenarios.Benavides-Serranoet al.[25]modified the optimization formulations of Legget al.[6,24]and incorporated detector unavailability and voting logic into the optimization model to consider the possibility that a detector is not able to perform its intended function and the requirement for a voting logic.In addition,four types of placement approaches,namely,the random approach,the volumetric approach,the minimum source distance approach,and the greedy scenario coverage approach,were compared with the formulation developed by Benavides-Serranoet al.[5].
Even though significant progress has been made for the placement of hazardous gas detectors,several key issues still need to be addressed.First,a majority of the existing studies and industry practices have typically considered a very limited set of high-impact or worst-case leak scenarios[26].However,there may be hundreds of thousands of potential leak scenarios due to the wide range of uncertainties resulting from leak conditions and weather parameters.How to reliably identify the important leak scenarios across all potential leak scenarios remains a great challenge.Second,in the existing stochastic programming formulations,the risk value of each leak scenario was assumed to be identical;thus,the objective functions were then simplified to minimize the detection time instead of the leak risk across all of the leak scenarios considered[6,24,25].Obviously,this hypothesis cannot reflect the real risk generated by various leak scenarios and might result in the designed detection system not meeting the detection performance requirements.In addition,only the placement approach for one type of gas detectors,i.e.,either flammable or toxic gas detectors,has been involved in previous studies.In actual applications,however,there may be a mixture of gases released.For example,the gas released from a high-sulfur natural gas purification plant may contain both flammable and toxic gases(e.g.,methane and hydrogen sulfide).In this case,how to allocate the location and number of two types of gas detectors is still an open question.
The aim of this study is to develop a risk-based point-type detector placement methodology suitable for either single or mixed gas release events.To cover the wide range of uncertainties related to leak conditions and weather parameters,a quantitative approach is first presented to identify the representative leak scenarios.Rigorous gas dispersion modeling is implemented using ANSYS-FLUENT.A modified stochastic mixed-integer linear programming formulation with the objective of minimizing the leak risk is proposed for the optimal placement of both flammable and/or toxic gas detectors.The greedy dropping heuristic algorithm(GDHA)is used to solve the optimization model.A case study is performed to illustrate and validate the proposed methodology.
2.Methodology
The framework of the proposed methodology is shown in Fig.1.The major steps are described in detail in the following sections.
2.1.Generation of representative leak scenarios
2.1.1.Set of leak sources
In order to fully reflect the actual leak risk of a target installation,all potential leak sources involved in hazardous gas releases should be identified through a hazard identification(HAZID)study,such as the hazard and operability analysis(HAZOP)and/or the preliminary hazard analysis(PHA)[27].The results of the HAZID should include the main features of a leak accident,such as the leakage location,direction,medium composition and phase,and time duration.
In addition,there may be a continuous distribution of leak hole sizes for various process equipment,making a great difficulty in estimating the leak frequencies based on the generic statistical data.To quantitatively characterize the leak probability,four hole size categories(i.e.,the small,medium,large and rupture holes)are adopted in this paper,as shown in Table 1[28].In this approach,four diameters(i.e.,6.4 mm,25 mm,102 mm,Min[D,406])are used to represent the continuous ranges associated with hole sizes,respectively.
With the identification of all possible leak sources for a selected installation,the set of leak sources can be generated using Eq.(1):

where,Ldenotes the set of leak sources;lxyrepresents a leak source located on thexth process equipment with theyth hole size;andbis the total number of process equipment with potential gas releases.
The occurrence probabilityP(lxy)of a leak sourcelxycan be calculated with the commercial software DNV-LEAK[26].The software is suitable for estimating the leak probability of base elements,equipment,segments,areas and installations used in onshore and offshore process industry.In DNV-LEAK,leaks are differentiated for 17 types of equipment(e.g.flanges,pipes,vessels).The generic leak frequencies of each type of equipment with different release hole sizes are obtained based on the historical failure data,which is derived from the Hydrocarbon Release Database(HCRD)compiled by HSE.The occurrence probabilityP(lxy)can then be calculated based on the corresponding generic leak frequency as well as the actual operating and management conditions.
2.1.2.Set of windfields
A wind field is typically characterized by two variables:wind direction and wind velocity.The wind direction determines the gas diffusion direction,whereas the wind velocity affects the diffusion and dilution rate of the released gas[2].In this paper,the wind direction is divided into eight equally distributed groups of 45°each using the eightorientation method[29].The occurrence probability in each wind direction is obtained based on a statistical analysis of the local meteorological data.In addition,the wind velocity is divided intocgroups with equal intervals in the range of0 tovmax(e.g.,the maximum local wind velocity over the past ten years).Then,the set of wind fields can be developed by combining various groups of wind directions and wind velocities,as shown with Eq.(2):

Fig.1.Framework of the methodology.

where,Wis the set of wind fields;wθυrepresents a wind field whose wind direction falling in the θth group while wind velocity in the υth group;andcis the number of wind velocity groups.
Based on the local historical meteorological data such as the windrose diagram,the joint distribution probabilityP(wθυ)for each wind fieldwθυcan be obtained by counting the frequencies of those wind velocity groups in eight wind directions.
2.1.3.Filtering representative leak scenarios
A complete set of leak scenarios for the installation is then generated via a random combination of the leak source set and the wind field set,as expressed with Eq.(3):

where,Sis the set of leak scenarios;Sxyθυrepresents a leak scenario associated with thexth leak equipment,yth leak hole size,θth wind direction group,and υth wind velocity group.

Table 1 Typical size of leak holes
Due to the mutual independence between the leak source set and the wind field set,the occurrence probabilityP(Sxyθυ)of leak scenarioSxyθυis calculated using Eq.(4):

where,P(Sxyθυ)represents the occurrence probability of leak scenarioSxyθυ;P(lxy)denotes the occurrence probability of leak sourcelxy;andP(wθυ)is the joint distribution probability of wind field.
Based on above approach,the limited but representative leak scenarios can then be filtered across the entire set of leak scenarios by balancing the potential leak scenarios covered and the computation cost.Compared with the conventional method,the proposed approach in this paper takes all equipment with potential gas releases into consideration rather than just the limited major equipment.In addition,all possible wind directions and wind velocities are considered.As a result,the proposed approach for the generation of representative leak scenarios is much more complete and robust than the conventional method.
2.2.CFD-based dispersion modeling
2.2.1.Modeling approach
Generally,3D modeling is recommended to guarantee accurate gas dispersion output,especially for installations with intricate geometries.In this study,the ANSYS-FLUENT package is used to model the gas dispersion[30].The computational domain is typically simplified to be a cuboid,and sufficiently large to simulate the effect of the local wind field[22].According to the specified wind direction,the wind is typically aligned normal to one or two surfaces of the computational domain,which are defined as the velocity inlet.The downwind boundary is set as the pressure outlet.A mass flow inlet boundary is applied at the leak source.The other surfaces are all defined as solid walls.
Gas concentration monitoring points(i.e.,candidate detector locations)should cover all areas where the accumulation of hazardous gases might occur.In general,if the released gas is heavier than air,detectors may be placed at a relatively low elevation(a minimum of 0.6 to 1.0 m above ground out-of-doors and 0.3 m above ground indoors)[11].In contrast,if the gas is lighter than air,detectors should be placed at a relatively high elevation(0.5-2 m above the release location)[11].
Before modeling a transient release,a converged steady state simulation with the leak source turned off should be performed to initialize the transient simulation.At the timet=0 s,the leak source is switched on,and a transient simulation for each representative scenario is then performed.A simulation lasting for 4 min is typically suggested for the transient simulations[31].
Thek-ε turbulence model is widely adopted to account for turbulence during the gas release.The segregated SIMPLE algorithm is used to couple the pressure and velocity.According to the desirable output accuracy,the first-or second-order upwind scheme and the first-or second-order central-differencing scheme can be employed for the convective and diffusion terms,respectively.
2.2.2.Data obtained from dispersion modeling
During every transient simulation,the gas concentration with time at each monitoring point(i.e.,detecting flammable and/or toxic gas release)should be recorded.Generally,the alarm threshold for flammable gas is set to 20%of the lower explosion limit(LEL),whereas the threshold for toxic gas is 10%of the concentration immediately dangerous to life or health(IDLH)[7].
It is well known that the leak risk is associated with the probability and the relevant accidental consequences.However,a rigorous accidental consequence analysis is extremely time-consuming in a practical project.To simplify the consequence assessment,the flammable or toxic gas cloud size above the threshold resulting from a release is used to approximately represent the possible consequences of a leak scenario in this paper.
Once the gas concentration at a monitoring point reaches the specified alarm threshold at the earliest time,the leak scenario is assumed to be detected by this monitoring point;the maximum value between the flammable and toxic gas cloud sizes above the threshold at this detection time is then taken as the accidental consequence in terms of this monitoring point.Undoubtedly,some monitoring points may not be able to detect a specific leak scenario at all or have a time delay compared to the first detection location.Under these situations,the emergency response procedures cannot be activated in time by the gas detection system,resulting in a large amount of hazardous gas released into the environment.Thus,a large enough size of gas cloud needs to be estimated.In this paper,the volume of the entire computational domain is used to represent the consequences for these situations[32].
2.3.Optimization formulation and solution algorithm
2.3.1.Objective function
The optimal placement scheme of hazardous gas detectors is typically defined as one with the minimum sum of leak risk across all leak scenarios.The objective function is expressed as follows:

whereUis the decisive variable,which represents the set of optimal locations of gas detectors;Sdenotes the set of representative leak scenarios,S={1,2,…,m},wheremis the number of representative leak scenarios;Ф is the set of monitoring points,Ф={1,2,…,q},whereqis the number of monitoring points;Piis the occurrence probability of a representative leak scenarioi,which can be determined using Eq.(4);δijis a Boolean variable,which denotes whether the leak scenarioiwould be first detected by the monitoring pointjor not,δij=1 if so and 0 otherwise;andVijis the maximum value between the volume of flammable and toxic gas cloud above the threshold,which is associated with the leak scenarioidetected at the monitoring pointj.It can be obtained using Eq.(6):
where,Vijkis thekth hazardous gas cloud size above the threshold released from the scenarioiwhen detected at the monitoring pointj.
2.3.2.Constraints
The constraints for the optimization problem are illustrated as follows.
(1)Maximum number of gas detectors allowed
To achieve a balance between the safety and the cost,the maximum number of gas detectors designed for an installation should be limited before optimization.This constraint can be expressed as follows:

where,djis a binary variable that represents the existence of a detector(dj=1)or the lack of a detector(dj=0)at the monitoring pointj;andnis the total number of gas detectors.
(2)Relationship between monitoring points and gas detectors.
If one monitoring point can detect the release of hazardous gases,there must be a gas detector placed at this position.This constraint can be described as follows:

(3)Relationship between leak scenarios and gas detectors.
Each leak scenario needs to be detected by at least one monitoring point.In other words,there must be the presence of a monitoring point which is the first one to detect each leak scenario.To ensure this requirement,the variable δijshould satisfy the following constraint:

If the leak scenarioicannot be detected by any monitoring points,the dispersion simulation should be ran again after properly resetting the locations of monitoring points.
2.3.3.Solution algorithm
The above optimization formulation is a mixed-integer linear programming problem.It can be solved using the drop-heuristics[33],the Lagrangian algorithm[34],or the branch-and-cut approach[35]in simple cases.When the problem size becomes too large,more advanced heuristics,such as genetic algorithms or Tabu Search and its derivatives[36-38],have to be adopted to enhance computational efficiency.Because the number of monitoring points is not prohibitively large in this study,the greedy dropping heuristic algorithm(GDHA)with more robustness is proposed to solve the optimization problem[39].Based on the GDHA,the optimization model can be solved by the following procedures.
Step 1:Set the number of monitoring pointsq.Note thatq≥n.
Step 2:Input basic data,including the number of representative leak scenariosm,the total number of gas detectorsn,and all maximum gas cloud sizesVij(i=1,2,…,m;j=1,2,…,q).
Step 3:Initialize the serial numberg=1.
Step 4:Remove thegth monitoring point;for each leak scenario,search for the minimum value among the gas cloud volumes associated with the remaining monitoring points,min{Vij}(j=1,2,…,q;j≠g);calculate the objective function valueR(Ug)using Eq.(10),which derived from Eq.(5).

Step 5:Setg=g+1,and return to Step 4.Ifg>q,then continue to Step 6.
Step 6:Rank all the objective function valuesR(Ug);drop out the monitoring point corresponding to the minimum objective function value,min{R(Ug)}g=1,2,…,q.
Step 7:Setq=q-1,and return to Step 3.Ifq<n,then output the remaining monitoring points'IDs,which represent the optimal locations and the corresponding type of detectors(i.e.,a flammable or toxic detector).
Above procedures can also be depicted by a flow chart,as shown with Fig.2.
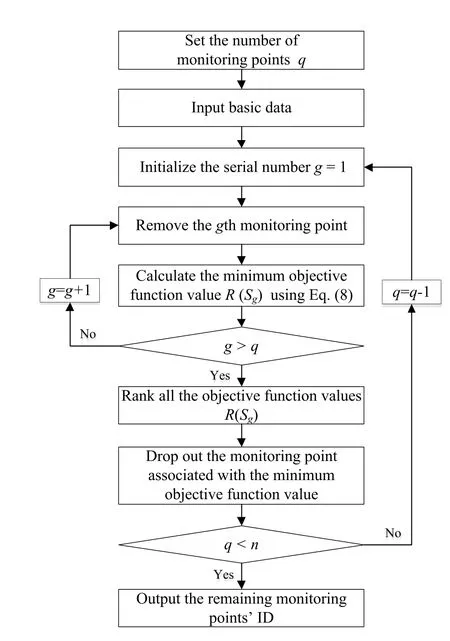
Fig.2.Solution procedure of the optimization model.
Based on the above optimization formulation and its solution algorithm,a computer program with C#language was developed to obtain the optimal results.
3.Case Study
3.1.Description
A high-sulfur natural gas purification plant in Chongqing,China,contains four main process units,namely,separation and filtration,desulfurization,dewatering,and sulfur recovery.The inlet pressure of the raw gas is 4.6-6.3 MPa,and the mole fraction of the hydrate sulfide is 12.31%-17.05%.For the simplified discussion in this study,only the desulfurization unit is selected as the target unit,whose threedimensional view and primary equipment are depicted in Fig.3.
3.2.Representative leak scenarios
For the desulfurization unit,a total of 16 potential leak locations were identifiedviaa HAZOP analysis.They were all located at the manholes or flange connections associated with four pressure vessels(i.e.,the wet purifying gas separator,the MDEA absorption tower,the MDEA regenerator,and the acid gas separator).The ranges of composition,pressure and temperature of released medium were determined according to the relevant process diagrams.The leak probability of each source was calculated using DNV-LEAK.The release rates were obtained through the gas leak rate formulations[40].We consider two potential leak sources(No.1 and No.2)as examples.Leak source No.1 is located at the connecting flange of the raw gas inlet pipe associated with the MDEA absorption tower,while No.2 is located at a manhole of the MDEA regenerator.The hazardous gases released from these two sources and their occurrence probabilities and leak rates are shown in Table 2.
Based on the local wind-rose diagram,the wind velocity can be divided into six groups with intervals of 2 m⋅s-1.The joint distribution probabilityP(wθυ)of wind direction and wind velocity can be obtained using the method proposed in Section 2.1.2,as shown in Table 3.
Based on the leak source and wind field sets,a total of3072 potential leak scenarios(16 leak equipment×4 leak hole sizes×8 wind directions×6 wind velocities)were then generated for the unit.Using Eq.(4)and the data presented in Tables 2 and 3,the quantitative occurrence probability for each leak scenario can be calculated using the MATLAB package.
According to the recommended approach in Section 2.1.3,the limited representative leak scenarios could then be filtered from the entire set of leak scenarios.Note that the occurrence probability of a leak scenario is selected as the filtering criterion.The leak scenarios covered under various filtering criteria are shown in Table 4.Only 81 leak scenarios are filtered from 3072 leak scenarios,if the occurrence probability of a scenario is required to be greater than 10-4per year.Meanwhile,the coverage rate for the total occurrence probability of leak scenarios reaches up to 91.83%.These results indicate that the representative leak scenarios can be effectively identified to reduce the computational resources,while still reflecting the real leak risk.
3.3.Gas dispersion simulations
The dimensions of the desulfurization unit are approximately with the length of 47 m,the width of 8 m,and the height of 10 m.The computational domain size is set to 160 m×50 m in area and 30 m in height,and the process unit is placed in the center of the computational domain.The transition of the mesh is slow and smooth.The total number of cells is approximately 3.9 million.
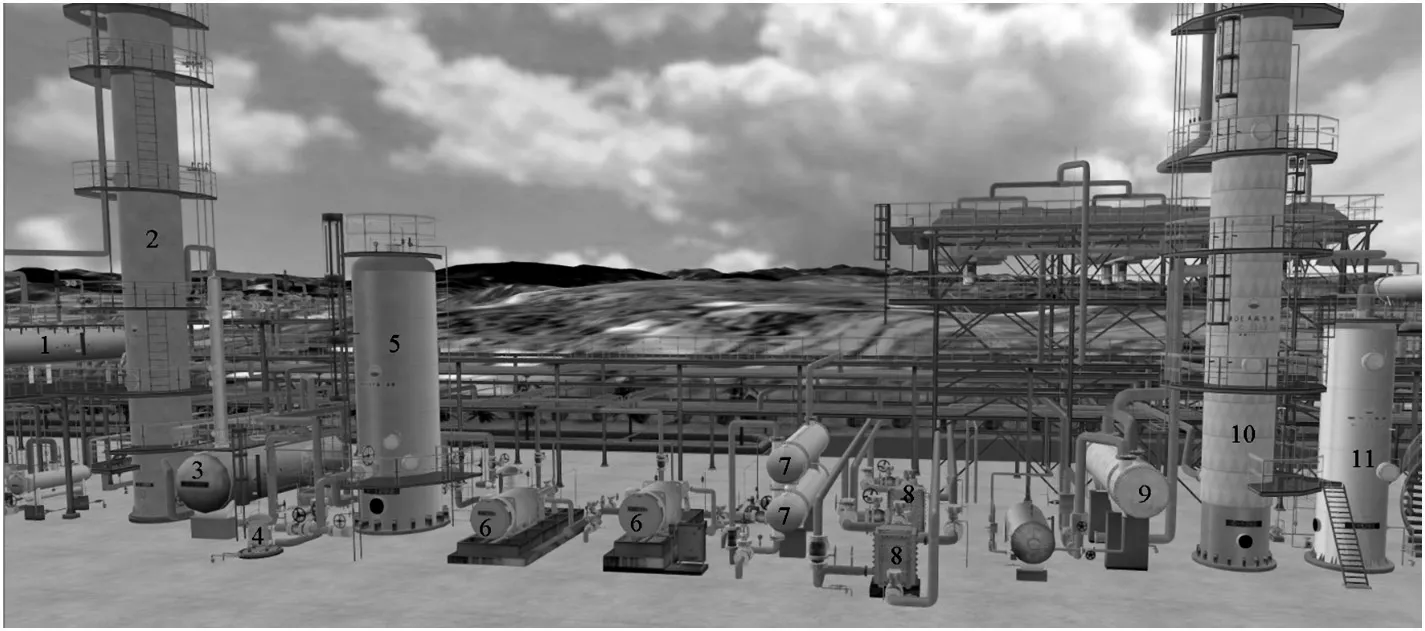
Fig.3.Three-dimensional view of the desulfurization unit.(1—Wet purifying gas separator;2—Methyl Di Ethanol Amine(MDEA)absorption tower;3—MDEA flash tower;4—MDEA filter;5—MDEA activated carbon separator;6—MDEA circulating pump;7—MDEA barren liquor after-cooler;8—MDEA barren-rich liquor heat exchanger;9—Reboiler of MDEA regenerator;10—MDEA regenerator;and 11—Acid gas separator)

Table 2 Leak probability(× 10-3 per year)and release mass rate(kg⋅s-1)of two leak sources
Because both methane and hydrogen sulfide may be released,two layers of gas concentration monitoring points were arranged on a 2 m×2 m grid at different elevations,as shown in Fig.4.The height of upper layer used to detect methane is 2 m above the release sources,whereas that of lower layer used to detect hydrogen sulfide is 0.5 m above the ground.The coding rule for monitoring points is as follows:Fx,yandTx,yrepresent methane and hydrogen sulfide gas detectors,respectively,and(x,y)denotes the location coordinates.
The simulations were all performed for 81 leak scenarios identified in Section 3.2 using a HP Z620 Workstation(Intel Xeon E5-2620 v2).Based on the simulation results,the detection timetijat the monitoring pointjunder the leak scenarioicould be obtained.Furthermore,the monitoring point which first detects the leak scenarioiand the maximum gas cloud volumeVijcould also be determined.For example,the monitoring pointT0,2is the first location to detect a specific leak scenario.The concentrationvs.time curve atT0,2is illustrated in Fig.5,and the gas cloud volumevs.time curves are shown in Fig.6.According to the specified thresholds,the detection time at the monitoring pointT0,2is 25.5 s,as shown in Fig.5.The size of methane and hydrogen sulfide gas cloud corresponding tot=25.5 s could then be determined to be 36 m3and2030 m3,respectively,as illustrated in Fig.6.Thus,the gas cloud volume associated with the monitoring pointT0,2is 2030 m3according to Eq.(6).The hydrogen sulfide dispersion range above 10%IDLH at the detection time is shown in Fig.7.
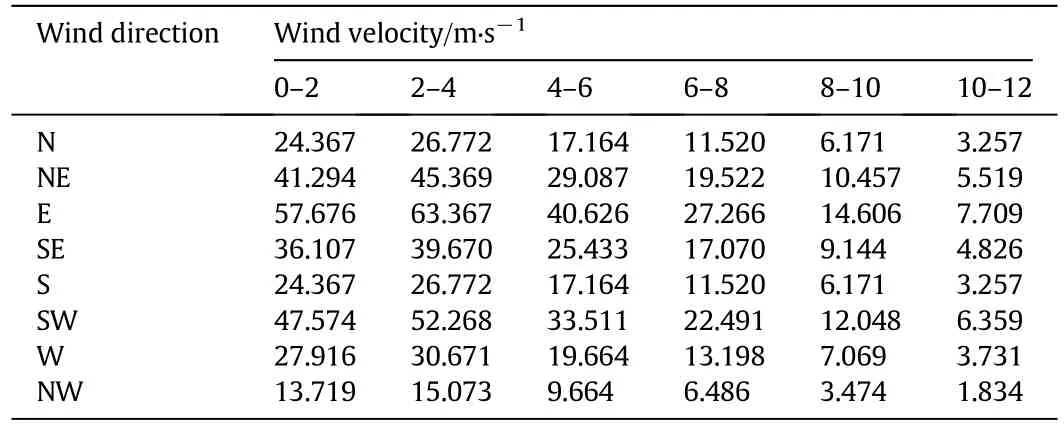
Table 3 Joint distribution probability(×10-3 per year)of wind direction and wind velocity
3.4.Optimal results and discussion
3.4.1.Number of gas detectors
After the total number of gas detectorsnis specified and all maximum gas cloud sizesVijare obtained from above gas dispersion simulations,the optimal locations and the corresponding number of flammable and/or toxic gas detectors can then be determined using the optimization formulation and solution algorithm proposed in Section 2.3.
To investigate the effect of the number of gas detectors on the leak risk,the objective function values associated with various number of gas detectors were calculated in sequence,as shown in Fig.8.It can be seen that the leak risk value will be reduced sharply when the number of gas detectors is less than 20,whereas remaining nearly unchanged when the number of gas detectors exceeds 20.Obviously,furtherincreasing the number of gas detectors cannot effectively reduce the total leak risk across all 81 representative scenarios.Thus,the optimal number of gas detectors under this situation should be around 20.

Table 4 Leak scenarios covered under different filtering criteria

Fig.4.Top view of the monitoring points.Flammable gas monitoring points are represented by○;toxic gas monitoring points are represented by+.
3.4.2.Location of gas detectors
To verify the effectiveness of the proposed methodology,a comparative analysis of the detection performance was further performed towards various placement schemes.Fig.9 presents the current placement scheme of gas detectors for the unit,which includes 2 flammable and 11 toxic gas detectors.Note that the gas detectors are all close to four pressure vessels(i.e.,the wet purifying gas separator,the MDEA absorption tower,the MDEA regenerator,and the acid gas separator).This placement is selected because the medium released from the wet purifying gas separator and the MDEA absorption tower primarily contains methane and hydrogen sulfide,whereas the gas leaked from the MDEA regenerator and the acid gas separator is only hydrogen sulfide.For this placement scheme,the coverage rate across all 81 representative release scenarios is only 65.4%,whereas the leak risk value gets up to 618 m3per year,as shown in Table 5.

Fig.5.Concentration vs.time curve at the monitoring point T0,2.
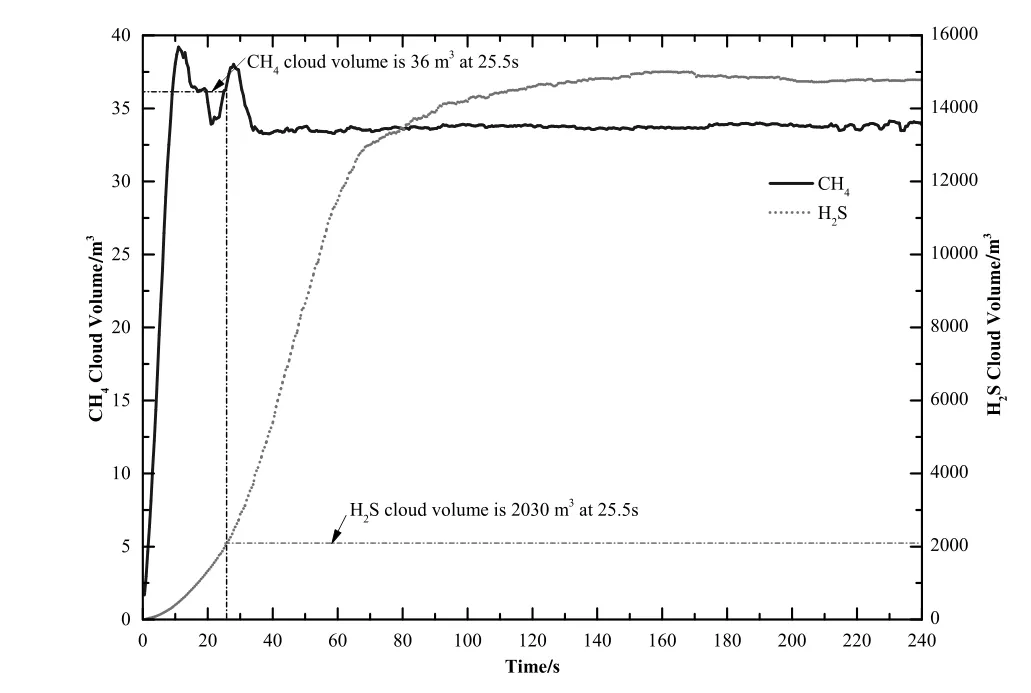
Fig.6.Gas cloud volume vs.time curves for a leak scenario.
Using the proposed methodology,an optimal placement scheme with 20 gas detectors can be obtained,as illustrated in Fig.10.There are 6 flammable gas detectors and 14 toxic gas detectors in the modified scheme.Compared to that of the current scheme,the coverage rate across all 81 leak scenarios is as high as 98.8%,whereas the leak risk value substantially drops to 60 m3per year,as shown in Table 5.The results illustrate that the methodology proposed in this study can improve the coverage fraction of leak scenarios,and ensure all scenarios detected with the minimum leak risk.

Fig.7.Dispersed hydrogen sulfide gas cloud above 10%IDLH at t=25.5 s.

Fig.8.Effect of the number of gas detectors on the leak risk.

Fig.9.Current placement of gas detectors.Blue○denotes flammable gas detectors,and red+denotes toxic gas detectors.
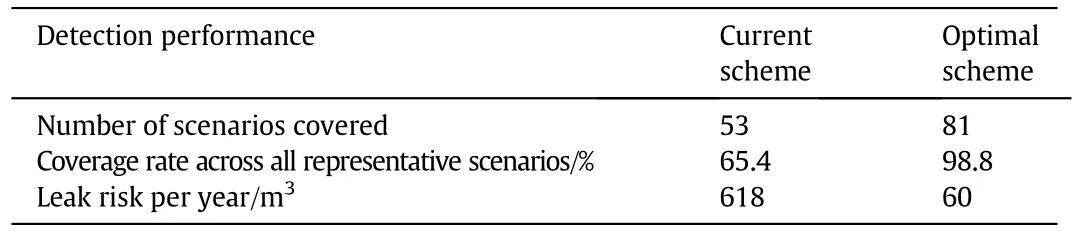
Table 5 Detection performance for two placement schemes
4.Conclusions
This study developed a risk-based methodology to optimize the placement of hazardous gas detectors with the objective of minimizing the total leak risk across all identified leak scenarios.Three main steps were included in the methodology:identifying representative leak scenarios,CFD-based dispersion modeling,establishment and solution of an optimization formulation.A quantitative approach to filter the representative leak scenarios was incorporated into the methodology to cover the wide range of uncertainties related to leak conditions and weather parameters.Three-dimensional CFD modeling was used to estimate the consequences of hazardous gas dispersions.A stochastic mixed-integer linear programming formulation and its solution algorithm were introduced in detail.The proposed methodology can determine the optimal point-type detector placement for either single or mixed gas releases.
This methodology was used to implement the optimal design of gas detector system in a high-sulfur natural gas purification plant in Chongqing,China.The effects of the number and location of gas detectors on the total leak risk was discussed.The results show that the methodology proposed in this study can improve the coverage fraction of leak scenarios,and ensure all scenarios detected with the minimum leak risk.
In this study,only the gas cloud volume was used to assess the consequences of leak scenarios instead of the actual accidental consequences.In addition,detector unavailability and voting logic were not incorporated into the optimization formulation to take into consideration the possibility that a detector might be not capable of performing its intended function.Therefore,in the future,more appropriate consequence representations and detector unavailability and voting logic should be introduced into the optimization methodology to improve it further.

Fig.10.Optimal placement of gas detectors.Blue○denotes flammable gas detectors,and red+denotes toxic gas detectors.
[1]HSE,Accident statistics for floating offshore units on the UK continental shelf(1980-2003),Report No.HMSO RR353,Health and Safety Executive,London,2005.
[2]K.S.Jung,C.K.Du,C.H.Yeon,J.K.Bong,K.P.Jeom,A methodology for determine efficient gas detector locations on offshore installations,Ships Offshore Struct.8(2013)524-535.
[3]HSE,Framework for HSE Guidance on Gas Detectors(On-line Checking of Flammability Monitoring Equipment—Final Report),2001.
[4]HSE,Fire and Explosion Guidance:Part 1:Avoidance and Mitigation of Explosions,2003.
[5]A.J.Benavides-Serrano,M.S.Mannan,C.D.Laird,A quantitative assessment on the placement practices of gas detectors in the process industries,J.Loss Prev.Process Ind.35(2015)339-351.
[6]S.Legg,A.Benavides-Serrano,J.Siirola,J.Waston,S.Davis,A stochastic programming approach for gas detector placement using CFD-based dispersion simulations,Comput.Chem.Eng.47(2012)194-201.
[7]D.L.Ma,J.Q.Deng,Z.X.Zhang,CO2leakage identification in geosequestration based on real time correlation analysis between atmospheric O2and CO2,Chin.J.Chem.Eng.22(2014)634-642.
[8]API,API Recommended Practice 14C:Recommended Practice for Analysis,Design,Installation,and Testing of Basic Surface Safety Systems for Offshore Production Platforms,7 ed.,2007.
[9]ISA,ANSI/ISA-RP 12.13.01(IEC 61779-6 Mod):Recommended Practice for the Installation,Operation,and Maintenance of Combustible Gas Detection Instruments,2003.
[10]GB 12358,National Standard of the People's Republic of China,Gas Monitors and Alarms for Workplace—General Technical Requirements,2006.
[11]GB 50493,National Standard of the People's Republic of China,Specification for Design of Combustible Gas and Toxic Gas Detection and Alarm for Petrochemical Industry,2009.
[12]GBZ/T 223,National Standard of the People's Republic of China,Specification of Setting Monitoring and Alarming Devices for Toxic Gas in the Workplace,2009.
[13]IEC,IEC 60079,Explosive Atmospheres-Part 29-2:Gas Detectors-Selection,Installation,Use and Maintenance of Detectors for Flammable Gases and Oxygen,2007.
[14]ISA,ISA-TR 84.00.07-2010:Technical Report Guidance on the Evaluation of Fire,Combustible Gas and Toxic Gas System Effectiveness,2010.
[15]NFPA 15,National Fire Protection Association,Standard for Water Spray Fixed Systems for Fire Protection,2007.
[16]SY 6503,Standard for the Petroleum and Natural Gas Industry of the Republic of China,Safety Technical Specification of Combustible Gas Detection and Alarm System for Petroleum and Natural Gas Engineering,2008.
[17]D.L.Ma,J.Q.Deng,Z.X.Zhang,Comparison and improvements of optimization methods for gas emission source identification,Atmos.Environ.81(2013)188-198.
[18]American IndustrialHygiene Association,Continuous Monitoring for Hazardous Material Releases,John Wiley&Sons,Inc.,2010
[19] Ø.Strøm,J.Bakke,Gas Detector Location,Safety on Offshore Installations(pp.3.3.1-3.3.12),ERA Technology Ltd.,London,UK,1999.
[20]S.DeFriend,M.Dejmek,L.Porter,B.Deshotels,B.Natvig,A risk-based approach to flammable gas detector spacing,J.Hazard.Mater.159(2008)142-151.
[21]E.Mariotti,A.D.Padova,T.Barbaresi,F.Tallone,A.Tugnoli,G.Spadoni,et al.,Development of improved strategies for the lay-out of fire and gas detectors,Chem.Eng.Trans.36(2015)283-288.
[22]V.R.Richart,D.O.Christian,Q.P.Efraín,M.Sam,a CFD-based approach for gas detectors allocation,J.Loss Prev.Process44(2016)633-641.
[23]K.Wang,T.Chen,S.T.Kwa,Y.Ma,R.Lau,Meta-modelling for fast analysis of CFD-simulated vapour cloud dispersion processes,Comput.Chem.Eng.69(2014)89-97.
[24]S.Legg,C.Wang,A.Benavides-Serrano,C.D.Laird,Optimal gas detector placement under uncertainty considering Conditional-Value-at-Risk,J.Loss Prev.Process Ind.26(2013)410-417.
[25]A.J.Benavides-Serrano,S.W.Legg,R.Vazquez-Roman,M.S.Mannan,C.D.Laird,A stochastic programming approach for the optimal placement of gas detectors:unavailability and voting strategies,Ind.Eng.Chem.Res.53(2014)5355-5365.
[26]B.Zhang,L.Wang,Z.G.Wang,Area risk level classification for hazardous gas release in petroleum refining installations,J.China Uni.Petrol.39(2015)144-149.
[27]Y.L.Zhang,W.T.Zhang,B.K.Zhang,Automatic HAZOP analysis method for unsteady operation in chemical based on qualitative simulation and inference,Chin.J.Chem.Eng.23(2015)2065-2074.
[28]API,API Recommended Practice 581,Risk-Based Inspection Methodology,3 ed.,2016.
[29]QX/T 51,Meteorological Industry Standard of the People's Republic of China,Specifications for Surface Meteorological Observation,Part 7:Measurement of Wind Direction and Wind Speed,2007.
[30]ANSYS,ANSYS-FLUENT Solver Theory Guide,ANSYS,Inc.,2013
[31]D.A.Crowl,J.F.Louvar,Chemical Process Safety:Fundamentals with Applications,Prentice Hall,Upper Saddle River,NJ,1990.
[32]J.W.Berry,L.Fleischer,W.E.Hart,C.A.Phillips,J.Watson,Sensor placement in municipal water networks,J.Water Resour.Plan.Manag.131(2005)237-243.
[33]A.Kuehn,M.Hamburger,A heuristic program for locating warehouses,Manag.Sci.9(1963)643-666.
[34]J.E.Beasley,Lagrangean heuristics for location problems,Eur.J.Oper.Res.65(1993)383-399.
[35]J.Berry,W.E.Hart,C.A.Phillips,J.G.Uber,J.Watson,Sensor placement in municipal water networks with temporal integer programming models,J.Water Resour.Plan.Manag.132(2006)218-224.
[36]P.Greistorfer,C.Rego,A simple filter-and-fan approach to the facility location problem,Comput.Oper.Res.33(2006)2590-2601.
[37]J.Kratica,D.Tošic,V.Filipović,I.Ljubic,Solving the simple plant location problems by genetic algorithm,RAIRO Oper.Res.35(2001)127-142.
[38]L.Michel,P.V.Hentenryck,A simple tabu search for warehouse location,Eur.J.Oper.Res.157(2004)576-591.
[39]X.F.Tang,H.J.Mao,X.H.Li,Logistics Facility Location Model Based on Reliability within the Supply Chain,IEEE International Conference on Management of Innovation&Technology 2008,pp.1099-1103.
[40]S.Mannan,Lees'Loss Prevention in the Process Industries:Hazard Identification,Assessment and Control,4 ed.Butterworth-Heinemann,2012.
 Chinese Journal of Chemical Engineering2018年5期
Chinese Journal of Chemical Engineering2018年5期
- Chinese Journal of Chemical Engineering的其它文章
- Bioregeneration of spent activated carbon:Review of key factors and recent mathematical models of kinetics
- CFD simulations of quenching process for partial oxidation of methane:Comparison of jet-in-cross- flow and impinging flow configurations☆
- Quantifying growth and breakage of agglomerates in fluid-particle flow using discrete particle method☆
- Coupling simulation of fluid structure interaction in the stirred vessel with a pitched blade turbine☆
- An integrated model for predicting the flame propagation in crimped ribbon flame arresters☆
- Assessment of k-ε models using tetrahedral grids to describe the turbulent flow field of a PBT impeller and validation through the PIV technique