反鱼雷鱼雷全弹道数学仿真系统设计与应用
2018-06-28 11:10:38倪文玺蒋继军
水下无人系统学报 2018年3期
曹 萌, 倪文玺, 蒋继军
反鱼雷鱼雷全弹道数学仿真系统设计与应用
曹 萌, 倪文玺, 蒋继军
(中国船舶重工集团公司 第705研究所, 陕西 西安, 710077)
数学仿真在武器论证和研制中能够起到优化参数匹配、评估作战效能、预估试验结果等作用。反鱼雷鱼雷自身特性决定了其弹道拦截过程较之传统鱼雷更为复杂, 基于此, 文中设计了一个反鱼雷鱼雷全弹道数学仿真系统, 阐述了仿真系统的功能与组成、关键模型和模块, 利用典型的作战工况进行了仿真应用, 验证了相关模型和仿真系统的有效性。反鱼雷鱼雷全弹道数学仿真系统可以在考虑作战使用的条件下对其总体性能方案进行研究, 验证弹道动作流程、导引律、性能参数等设计的合理性, 为反鱼雷鱼雷的论证和工程研制提供有力支撑。
反鱼雷鱼雷; 全弹道; 仿真系统
0 引言
现代鱼雷通过对目标特性的提取和判别, 已经能够有效识别真假目标。在这种情况下, 声诱饵、声干扰器等“软对抗”器材对鱼雷的诱骗效果将会逐渐降低。反鱼雷鱼雷是一种积极、主动搜寻并拦截来袭鱼雷的“硬杀伤”武器, 具有不同于传统鱼雷的鲜明特点和难点, 以其拦截毁伤概率高成为世界海军水下防御的重要发展方向之一[1]。
反鱼雷鱼雷整个弹道拦截过程不仅是其设计中由诸多参量相互作用而成的复杂过程, 而且和作战使用中来袭鱼雷的态势相关。反鱼雷鱼雷设计中每个弹道段之间紧密联系, 其中任一参量的变化都有可能给整个武器系统的作战效能带来很大影响[2-3]。研究并设计高置信度的反鱼雷鱼雷全弹道数学仿真系统进行仿真试验研究显得尤为重要。文中正是在这样的需求背景下, 针对反鱼雷鱼雷的作战模拟, 建立反鱼雷鱼雷全弹道仿真系统, 为反鱼雷鱼雷的作战使用以及反鱼雷鱼雷的作战效能研究提供支撑。
1 仿真系统组成和功能
反鱼雷鱼雷全弹道仿真系统软件各功能模块组成及相关逻辑如图1所示。从总体结构上分为人机交互、仿真模型、仿真过程控制、数据分析四大部分。可实现以下功能: 1) 支持单次仿真和统计仿真; 2) 应用通用软件开发工具, 设计和开发系统仿真环境框架和相关仿真模型, 模型能够独立封装, 可重用性强; 3) 通过灵活的作战态势设定, 能够完整模拟来袭鱼雷攻击水面舰艇和反鱼雷鱼雷拦截来袭鱼雷的全过程; 4) 通过仿真试验, 可评估不同反鱼雷鱼雷射击阵位下, 反鱼雷鱼雷拦截来袭鱼雷的作战效能, 分析、验证反鱼雷鱼雷不同参数指标对系统性能的影响; 5) 在典型反鱼雷鱼雷态势驱动下, 可对反鱼雷鱼雷全弹道动作流程(包括初始程序弹道、自导搜索弹道、跟踪导引弹道和命中攻击弹道)的设计合理性进行验证。
2 仿真系统设计
2.1 人机交互功能设计
反鱼雷鱼雷全弹道仿真系统的人机界面采用QT4[4-5]开发, 显示分辨率≥1 024×768, 界面可自适应全屏显示及多个页面同时显示。同时, 人机界面符合Windows风格, 能够按照试验场态势和实航试验任务书形式设置仿真初始态势, 根据设定态势对人机界面进行适配。界面执行流程如图2所示, 启动软件后进入仿真实体性能参数配置, 配置完成后, 进入仿真模式选择, 仿真模式分为单次仿真和统计仿真, 进入相应模式初始界面后, 开始执行仿真流程。
1) 界面1: 仿真实体性能参数配置如图3所示, 包括反雷性能参数、来袭雷性能参数和武器系统性能参数。
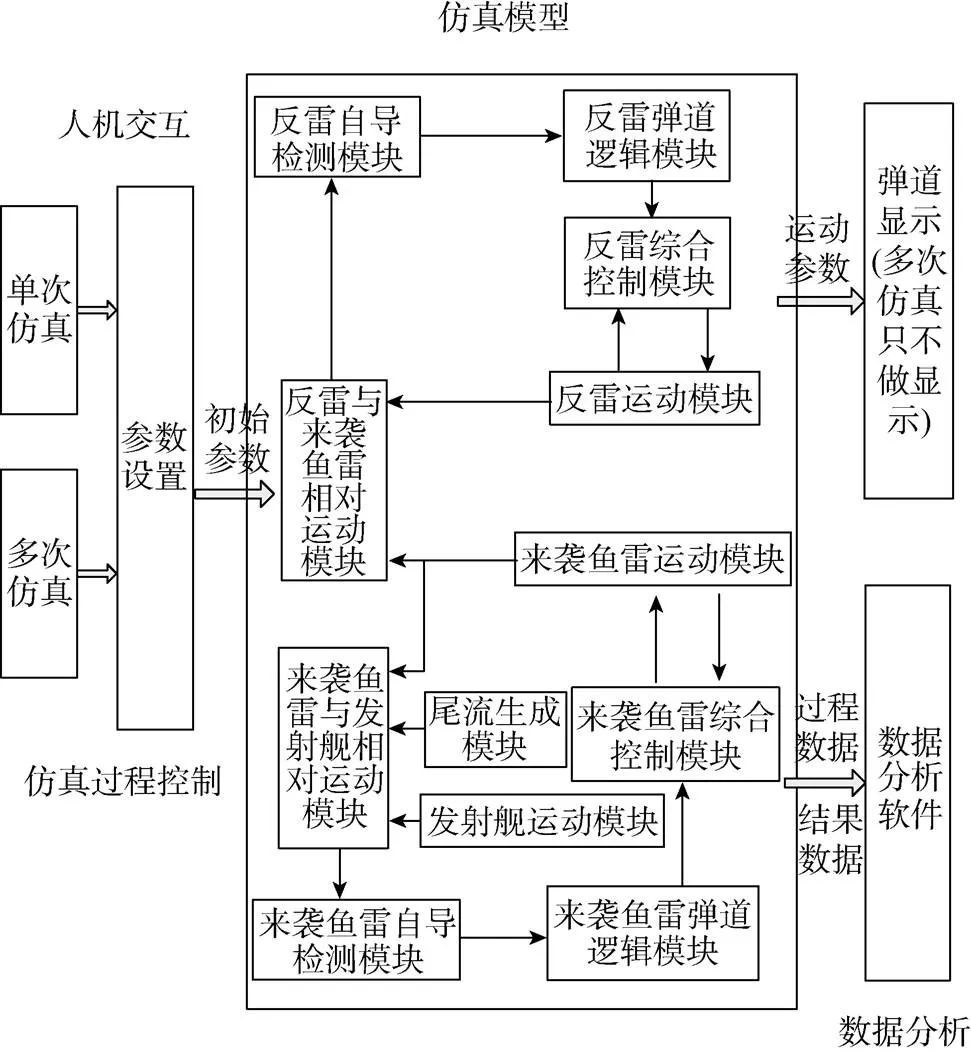
图1 基本功能模块调用关系图
2) 界面2: 仿真选择界面, 点击单次仿真, 进入界面3, 点击统计仿真, 进入界面4。
3) 界面3: 单次仿真界面, 首先进行仿真态势设定, 点击仿真态势设定按钮, 进入仿真态势设定界面, 仿真态势设定完成后点击确定, 通过返回按钮进入单次仿真界面, 进行单次仿真。
4) 界面4: 统计仿真界面, 首先进行仿真态势设定, 点击仿真态势设定按钮, 进入仿真态势设定界面, 仿真态势设定完成后点击确定, 通过返回按钮进入到统计仿真界面, 进行统计仿真。
5) 界面5: 仿真态势设定界面如图4所示, 包括本舰态势、来袭鱼雷态势和反雷态势。
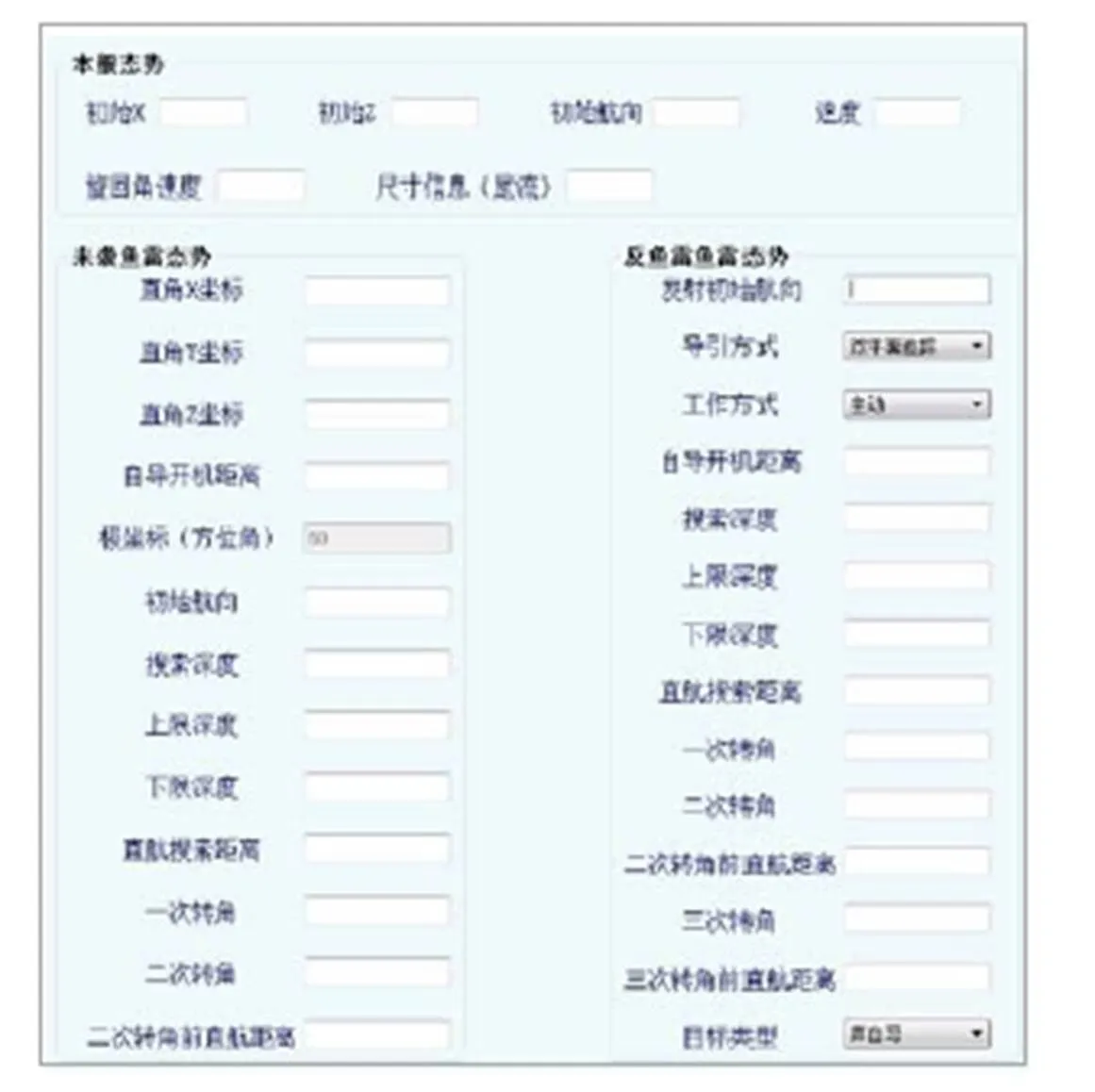
图4 仿真实体态势界面
2.2 仿真模型设计
仿真建模采用类库封装的建模方法, 形成数字鱼雷仿真类库, 类库包含本舰、反鱼雷鱼雷、来袭鱼雷、海洋环境以及仿真过程控制等各模型组件。各个模型考虑可重用性需求, 对输入、输出接口进行了标准化的设计, 能够被其他仿真系统调用, 下面以反鱼雷鱼雷和过程控制模型为例, 进行对外交互接口的设计。
2.2.1 反鱼雷鱼雷模型
反鱼雷鱼雷模型[6]由5个模块组成, 包括: 鱼雷运动模块、综合控制模块、相对运动模块、弹道逻辑模块和自导检测模块, 各功能模块间的调用关系和输入输出接口如图5所示。
2.2.2 仿真过程控制模型
模型建立完成后, 设定初始状态, 进行仿真参数范围设置, 如图3和图4所示, 进行多次迭代仿真试验, 并对整个仿真过程进行控制(开始、暂停和停止)。运行过程中, 各个模块按照步长进行推进, 模块间按照协议进行通信; 单次仿真为鱼雷追击舰艇, 舰艇探测识别来袭鱼雷并发射反鱼雷鱼雷进行射击拦截, 在一次过靶后单次仿真结束; 单次仿真结束后, 自动调整参数设置, 进行下次仿真运行迭代; 根据搜索优化设定条件, 寻求满足要求的局部最优结果, 输出仿真过程参数如表1所示, 仿真结果数据如表2所示。
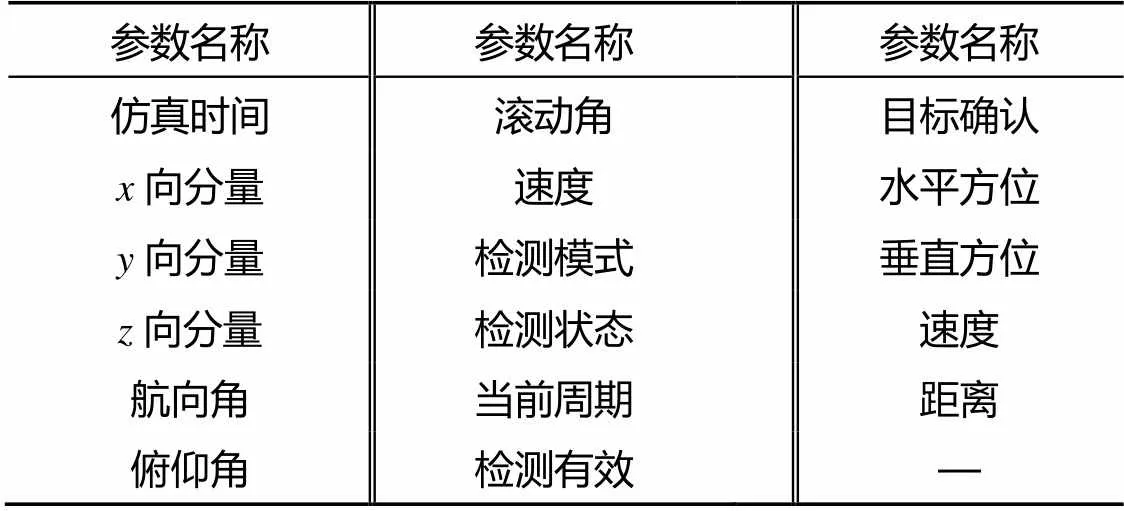
表1 仿真过程参数
表2 仿真结果参数
2.3 软件流程设计
反鱼雷鱼雷全弹道数学仿真系统应用流程按照预想的作战仿真过程设计, 具体描述如下。
1) 运行反鱼雷鱼雷全弹道数学仿真平台, 对仿真方式进行选择, 包括单次仿真和统计仿真。
2) 设置相应的仿真态势(包括来袭鱼雷的初始位置、本舰的初始位置)。
3) 依据目前的声呐探测能力, 给出带有一定误差的鱼雷报警舷角、距离、速度和航向信息, 按照迎面拦截射击法[7-10]求解射击诸元参数。
4) 装订射击诸元参数, 包括一次转角、一次转角后航行时间、二次转角等。
5) 仿真开始, 随着仿真步长的推进, 每仿真步长执行以下步骤: a. 本舰运动; b. 来袭鱼雷按照设定状态运动, 完成初始弹道, 自导开机, 进行声自导检测, 执行相应自导导引弹道逻辑; c. 反鱼雷鱼雷发射后按照设计的全弹道流程开始运动。
6) 如果为单次仿真, 每显示步长, 本舰、来袭鱼雷和反鱼雷鱼雷更新数据到人机交互界面, 进行态势显示。
7) 统计仿真采用非实时解算方式, 每完成一次仿真, 其数据更新到人机交互界面进行显示。
2.4 仿真同步和时钟控制
1) 反鱼雷鱼雷全弹道数学仿真系统进行单次仿真时, 针对3个仿真实体建立3个线程同步运行, 每个线程的数学仿真步长为5 ms, 直到仿真停止, 过程数据显示采用时钟控制, 每20个仿真步长更新一次;
2) 反鱼雷鱼雷全弹道数学仿真系统进行统计仿真时, 采用非实时解算方式, 对单条次解算结果和统计结果进行输出;
3) 反鱼雷鱼雷全弹道数学仿真系统支持仿真结果回放, 仿真过程数据存储步长为5 ms, 进行回放时, 以数据存储步长进行仿真推进。
3 仿真应用
3.1 反鱼雷鱼雷全弹道典型态势仿真
在建立的全弹道数学仿真系统平台上, 以某型鱼雷攻击某型水面舰艇为例, 对反鱼雷鱼雷拦截来袭鱼雷的整个作战过程进行仿真试验, 通过单次仿真验证反鱼雷鱼雷全弹道动作流程的设计合理性; 通过统计仿真评估不同反鱼雷鱼雷射击阵位下, 反鱼雷鱼雷拦截来袭鱼雷的作战效能。
3.1.1 作战想定
仿真系统采用大地坐标系, 以零时刻本舰位置为原点, 正北为轴,轴按右手法则确定, 建立直角坐标系。
仿真想定内容如下:
1) 仿真初始时刻(0 s), 舰艇位于(0,0)点, 初始航向为0º, 以一定速度直航运动; 来袭鱼雷进入反鱼雷鱼雷探测系统探测范围, 探测来袭鱼雷坐标为(2 000, 2 000), 方位为–45º, 速度为50 kn; 反鱼雷鱼雷处于为发射待命状态;
2) 反鱼雷鱼雷探测系统对目标的方位探测误差为±3º, 距离探测误差为5%(为初始探测距离), 数据满足正态分布;
3) 反鱼雷武器系统在鱼雷报警后规定时间内完成射击诸元的求解并发射反鱼雷鱼雷;
4) 反鱼雷鱼雷入水后, 进行目标搜索和检测, 当来袭鱼雷在反鱼雷鱼雷自导作用范围内时, 捕获来袭鱼雷, 以高速向目标靠近;
5) 当雷目距离小于引信作用距离时, 反鱼雷鱼雷拦截成功。
3.1.2 仿真结果
根据试验态势想定, 在参数设定中对目标、来袭鱼雷、反鱼雷鱼雷坐标位置进行设定。同时, 对鱼雷其他需求参数进行配置。设定完成后加载试验态势, 进行单次仿真和统计仿真。仿真过程如图6和图7所示。
从图6可以看出, 舰艇武器系统在报警后规定时间内发射反鱼雷鱼雷, 反鱼雷鱼雷按照武器系统求解的射击诸元运动, 自导开机后, 反鱼雷鱼雷检测到来袭鱼雷时, 以高速靠近目标, 执行相应的导引弹道, 当反鱼雷鱼雷与来袭鱼雷相对距离小于反鱼雷鱼雷毁伤半径或来袭鱼雷与舰艇相对距离小于来袭鱼雷毁伤半径时, 仿真停止。
从图7可以看出, 在距离误差5%, 方位误差3º, 航向误差2º, 速度误差1.5 m/s, 且均满足正态分布条件下, 统计仿真命中概率为74%, 仿真结果与前期的理论研究结果相符。
3.2 反鱼雷鱼雷全弹道性能指标优化仿真
在建立的全弹道数学仿真系统平台上分析反鱼雷鱼雷不同性能参数的作战效能。
3.2.1 仿真内容
在同一发射阵位下分别模拟来袭鱼雷为直航雷和声自导雷时, 反鱼雷鱼雷在不同自导作用距离下的作战效能, 考虑声呐探测的距离和方位误差, 考核指标为反鱼雷鱼雷的拦截概率。
3.2.2 仿真结果
仿真结果见表3, 由表可见, 文中建立的全弹道数学仿真系统可以分析反鱼雷鱼雷在不同性能参数下的作战效能, 由此可以应用该系统在考虑作战使用的条件下对总体性能参数进行研究, 为反鱼雷鱼雷的论证和工程研制提供参考。
表3 全弹道仿真结果
4 结束语
文中通过对武器全弹道过程的描述, 利用C++ GUI QT创建了完整的弹道过程仿真平台。该仿真平台采用参数化建模, 将重要的参数与模型相剥离, 使得模型具有较好的复用性和灵活性。通过反鱼雷鱼雷数学仿真软件对反鱼雷鱼雷的全弹道过程仿真得到仿真数据, 支持反鱼雷鱼雷作战使用的深入研究, 可较好地用于研究验证反鱼雷鱼雷全弹道动作流程的设计合理性, 优化性能参数设计, 为反鱼雷鱼雷的作战效能研究提供参考。下一步将充分利用实航试验数据、陆上台架试验数据以及仿真试验数据, 完善反鱼雷鱼雷作战使用环境及全系统数学模型, 形成实航试验、陆上台架试验及仿真试验数据库、模型库、方法库, 进一步为其工程研制提供支撑。
[1] 陈春玉. 反鱼雷技术[M]. 北京: 国防工业出版社, 2006.
[2] 李斌, 范若楠, 倪文玺, 等. 基于弹道仿真的鱼雷性能优化方法[J]. 鱼雷技术, 2015, 23(3): 172-176.Li Bin, Fan Ruo-nan, Ni Wen-xi. An Optimization Method of Torpedo Performance Based on Trajectory Simulation [J]. Torpedo Technology, 2015, 23(3): 172-176.
[3] 丁振东. 反鱼雷鱼雷关键技术探讨[J]. 鱼雷技术, 2007, 15(1): 6-11.Ding Zhen-dong. Discussion about Key Technologies of Anti-Torpedo Torpedo[J]. Torpedo Technology, 2007, 15(1): 6-11.
[4] Jasmin Blanchette. C++ GUI Qt4编程[M]. 北京: 电子工业出版社, 2014.
[5] Mark Summerfield. Qt高级编程[M]. 北京: 电子工业出版社, 2014.
[6] 蒋继军. 鱼雷仿真技术[M]. 北京: 国防工业出版社, 2013.
[7] 李本昌, 李长文. 预定相遇态势的潜射鱼雷射击及其技术方法[J]. 指挥控制与仿真, 2013, 35(2): 5-8.Li Ben-chang, Li Chang-wen. The Shooting of Submarine Torpedo and Its Technical Method in Predetermined Situation[J]. Command Control & Simulation, 2013, 35(2): 5-8.
[8] 由大德, 徐德民. 反鱼雷鱼雷拦截概率影响因素仿真分析[J]. 鱼雷技术, 2010, 18(4): 312-315.You Da-de, Xu De-min. Analysis on Parameters Influening Intercept Probability of Anti-torpedo Torpedo[J]. Torpedo Technology, 2010, 18(4): 312-315.
[9] 李晓宁,明星, 朱若寒.反鱼雷鱼雷拦截弹道及拦截概率[J].鱼雷技术, 2008, 16(3): 9-12.Li Xiao-ning, Ming Xing, Zhu Ruo-han. Intercept Trajectory and Intercept Probability of Anti-Torpedo Torpedo[J]. TorpedoTechnology, 2008, 16(3): 9-12.
[10] 夏睿, 张静远, 张江, 等. 反鱼雷鱼雷初始占位搜索研究[J]. 船电技术, 2013, 33(1): 22-24. Xia Rui, Zhang Jing-yuan, Zhang Jiang, et al. Research on the Anti-torpedo Torpedo Initial Search Sites[J]. Marine Electric & Electronic Engineering, 2013, 33(1): 22-24.
(责任编辑: 许 妍)
Design and Application of Whole Trajectory Simulation System for Anti-Torpedo Torpedo
CAO Meng, NI Wen-xi, JIANG Ji-jun
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi’an 710077, China)
Mathematical simulation plays important roles in weapon demonstration and development, such as optimizing parameter matching, assessing operational effectiveness, and predicting test results. Because the trajectory interception process of an anti-torpedo torpedo(ATT) is more complicated than that of traditional torpedo due to self-characteristic of the ATT, a whole trajectory simulation system for the ATT is designed in this paper. The function and composition of the simulation system, as well as the key models and modules, are expounded. Simulation application is carried out under typical combat conditions, and the validity of the models and simulation system is verified. This whole trajectory simulation system can be adopted to research ATT’s overall performance plan considering operational application, verify design rationality of whole trajectory process, guidance law and performance parameters, and facilitate demonstration and engineering development of an ATT.
anti-torpedo torpedo; whole trajectory; simulation system
曹萌, 倪文玺, 蒋继军. 反鱼雷鱼雷全弹道数学仿真系统设计与应用[J]. 水下无人系统学报, 2018, 26(3): 253-257.
TJ630.1; TP391.9
A
2096-3920(2018)03-0253-05
10.11993/j.issn.2096-3920.2018.03.011
2017-09-26;
2017-11-13.
曹 萌(1990-), 女, 硕士, 工程师, 研究方向为数学仿真.
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:12
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
汽车与安全(2020年1期)2020-05-14 13:27:19
中国外汇(2019年19期)2019-11-26 00:57:36
中国化肥信息(2019年5期)2019-06-25 00:52:28
测绘科学与工程(2016年5期)2016-04-17 06:51:20
西部广播电视(2015年8期)2016-01-16 03:45:26
中国卫生(2015年2期)2015-11-12 13:13:58