
磁流变半主动悬架试验研究∗
2018-06-20 09:08彭志召张进秋傅晓为
汽车工程 2018年5期
彭志召,张进秋,张 建,傅晓为
(1.陆军装甲兵学院车辆工程系,北京 100072; 2.上海瑞尔实业有限公司,上海 201805)
前言
半主动悬架能显著改善车辆的乘坐舒适性和操纵稳定性,且具有控制能耗低、鲁棒性好、性价比高等优点,成为车辆工程领域的研究热点[1]。而可调阻尼器和控制策略又是半主动悬架减振的关键[2]。
磁流变阻尼器和电液阀阻尼器是两种主要的可调阻尼器。基于磁流变技术的半主动悬架已在诸多高端车型中应用,例如Delphi公司的MagneRide系统已推出第3代产品,所使用的磁流变阻尼器采用双线圈方案,有更好的阻尼力控制范围和更快的响应速度。基于电液阀阻尼器的半主动悬架已有商业化应用,例如 ZF Sachs公司的 CDC(continuous damping control)悬架系统。军用越野车辆由于行驶路况恶劣,对高性能悬架系统的需求更为迫切,要求也更高。美军坦克自动化研发工程中心和Rod Millen特种车辆厂共同研制出了磁流变半主动悬架系统,并分别在“悍马”和Stryker装甲输送车上进行了实车道路试验[3-4]。结果表明,样车的乘坐舒适性和机动性得到了大幅改善。美军还与Lord公司签订合同,拟将磁流变半主动悬架技术应用于LMTV等高机动车上,以全面提升战斗车辆的机动能力[5]。Horstman公司研发了通过电液阀实现阻尼调整的肘内式液气半主动悬架,并应用于NLOS-C非直瞄155mm自行火炮,印度马德拉斯(Madras)理工大学也在为重型履带车辆研究类似的液气半主动悬架系统[6]。与电液阀阻尼器相比,磁流变阻尼器具有结构紧凑、响应快、可控阻尼力大等优点。但磁流变阻尼器在阻尼力精确控制方面还存在影响因素多、建模与解算复杂和示工特性畸变等缺点[7-8]。
半主动悬架的控制策略大致分为4类:一是利用悬架系统的结构或状态参数的依赖关系提出的简单控制策略,例如天棚控制、地棚控制和ADD控制等[9-11];二是基于反馈校正的控制方法,如 PID控制、自适应控制等[12-13];三是基于最优控制理论的控制策略,如LQR/LQG控制、滑模控制、鲁棒控制和模型预测控制等[14-16];四是模糊控制、神经网络控制以及运用智能优化算法(如遗传算法、粒子群算法等)与其他控制理论相结合的智能控制策略[17-19]。半主动悬架的控制策略几乎涉及到所有先进的控制理论和方法,悬架参数的不确定性、非线性等问题的考虑也越来越细致,但不少控制策略的设计和计算过程复杂繁琐,失去了半主动悬架本身应有的工程应用意义。文献[20]中将一些经典控制策略与复杂的控制策略(如滑模控制、模型预测控制、鲁棒控制等)进行对比,结果表明一些简单的控制策略甚至能达到比复杂控制策略更好的效果。文献[21]中也提出将简单实用作为半主动控制策略的评价指标之一。
尽管国内针对车辆半主动悬架的研究已有不少报道,但大多只是理论探讨和仿真分析。本文中以工程应用为出发点,基于自行研制的具有并联旁通孔的磁流变阻尼器,采用3种开关类控制策略,通过台架试验验证磁流变阻尼器及其控制策略的有效性,为磁流变半主动悬架技术的工程应用奠定基础。
1 悬架系统动力学模型与控制策略
1.1 悬架系统动力学模型
1/4车悬架模型如图1所示。图中:ms为簧载质量,mt为非簧载质量,ks和kt分别为悬架刚度和车轮刚度,cs为可控阻尼器的阻尼系数,xr为路面不平度激励,xs和xt分别为车轮和车体垂直位移。坐标原点选在各自平衡位置,其运动微方程可表示为

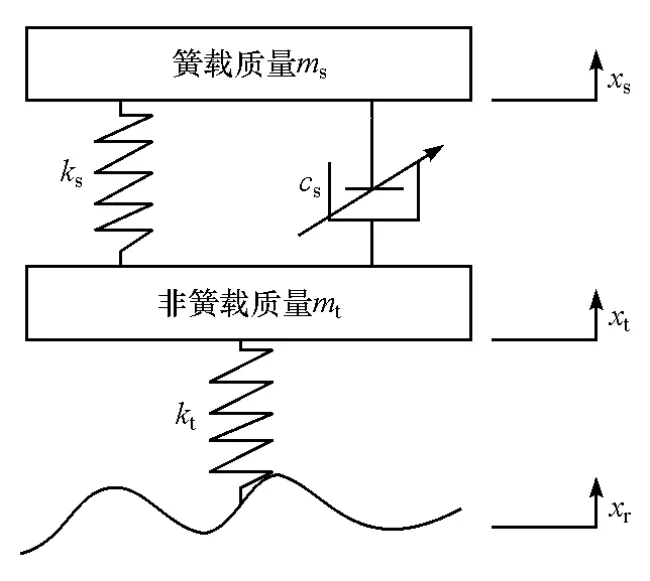
图1 1/4车悬架模型
1.2 控制策略选择
从工程应用的角度来看,简单有效的控制策略也更具实用性[21]。本文中选取3种开关控制策略用于悬架振动控制试验。
1.2.1 天棚控制
天棚(sky hook,SH)控制是最为经典的车辆悬架控制策略,不仅被广泛应用,而且得到了持续的改进研究,已成为悬架控制策略设计的基本框架[22]。考虑实用性,天棚控制律[23]为

式中:cmax和cmin分别为阻尼器阻尼系数的上下限。
由式(2)可知,天棚控制需要测量车身速度和悬架相对速度信号作为输入,因此至少需要两个传感器。
1.2.2 SH-ADD控制
在文献[11]中提出了一种加速度驱动阻尼控制(acceleration driven damper control, ADD),即

其思路是当路面信息无法获取时,尽可能衰减车体的加速度。
文献[24]中鉴于天棚半主动控制在低频段(车体共振区)控制效果好,在中高频区控制效果差,而ADD控制则相反,在中高频段控制效果好,低频段控制效果差,将天棚半主动控制与ADD控制相结合,实现它们的优势互补,提出了 SH-ADD混合控制:式中α=2πfcross,fcross为天棚半主动控制与ADD控制车身加速度传递曲线的交点频率。由于半主动控制呈现较强的非线性,无法通过理论计算获得传递率曲线的函数式,因而传递率曲线的交点频率只能采取估算的方法得到[25]。()实际上是一个分频器,从上式可以看出,其符号决定了控制策略的切换,当()>0时选择ADD控制,否则选择天棚半主动控制。
1.2.3 频域控制
文献[26]中依据悬架阻尼在频域上对车身加速度、悬架动行程和车轮动变形3个悬架指标的传递特性的影响存在较好的一致性和悬架不动点的相关特性,提出了频域控制:

式中:为车身加速度变化率,可以由车身加速度微分获得,文献[27]中提出的改进天棚控制就以作为信号输入;为车身速度,可以由车身加速度积分获得,为避免信号中直流或趋势项成分导致积分饱和,须将加速度信号通过滤波积分器1/(s+2πfstop)后获得速度信号,fstop为截止频率,一般取值0.1~0.2Hz;α=(2πf1)2,f1是其中一个不动点的频率。

其中:β=2(ms+mt)ks+mskt
()也是一个分频器,该算法的原理是将悬架系统的振动特征频带分为两个部分来实施阻尼控制:当 f<f1时,实施加大阻尼;当 f≥f1时,实施加小阻尼。由式(5)可知,该算法只须在车身上安装加速度传感器,在成本和可靠性上有显著优势。
2 磁流变阻尼器
鉴于磁流变阻尼器的诸多优点,采用具有并联常通孔的磁流变阻尼器作为悬架试验的阻尼调节执行器,其结构如图2所示[28]。与普通磁流变阻尼器的区别之一是铁芯上有若干个与环形阻尼缝隙并联的旁通孔。当线圈不通电流时,磁流变液以牛顿流体的状态从旁通孔和环形阻尼缝隙共同流过,表现为最小阻尼系数。当线圈通上电流后,环形阻尼缝隙中的磁流变液受磁场感应发生流变“固化”,而由于铁芯材料的导磁率远大于磁流变液的,在铁芯的磁通密度没有过饱和的条件下,磁力线从铁磁材料上通过,铁芯旁通孔中的磁流变液不会被磁化发生流变效应,磁流变液会优先从旁通孔顺利流过,阻尼器表现为最大阻尼系数。只有活塞两端的压差足够大,环形缝隙中的磁流变液才会发生屈服流动,环形缝隙与限压阀的功能类似,通过的电流大小决定了活塞两端的泄压压差。区别之二是在铁芯外套有引磁环,引磁环之间有隔磁环,目的是增大阻尼通道的有效长度,改善阻尼器的可控性,并保护线圈,防止线圈被高压液体挤压和冲刷,提高其可靠性。
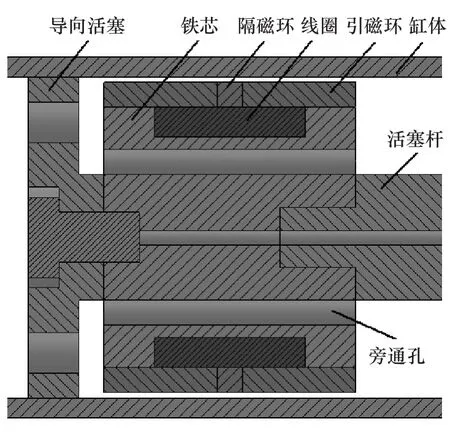
图2 磁流变阻尼器结构
3 悬架试验研究
3.1 悬架试验设备
悬架试验在2自由度台架上进行,如图3所示。主要由路面激励系统、悬架振动系统、控制系统和数据采集系统4部分组成。为保证试验台与车辆悬架的动力学特性相同,采用相似原理配置试验台,使其与某型越野车辆悬架有相同的固有频率。配置簧上质量为 125kg,簧下质量为 25kg,悬架刚度约为11kN/m,车轮刚度约为220kN/m,则悬架固有频率约为1.5Hz,车轮固有频率约为15Hz。被动悬架的阻尼比配置约为0.2,悬架的半主动控制由具有并联旁通孔的磁流变阻尼器来执行实现,其最小阻尼系数约为被动阻尼器的0.5倍,最大阻尼系数约为被动阻尼器的2倍。控制系统主要包括DSP控制器、PWM电流源和状态观测用的传感器。数据采集系统主要包括计算机、采集仪和测量状态信号用的传感器。
3.2 试验结果分析
3.2.1 正弦激励响应
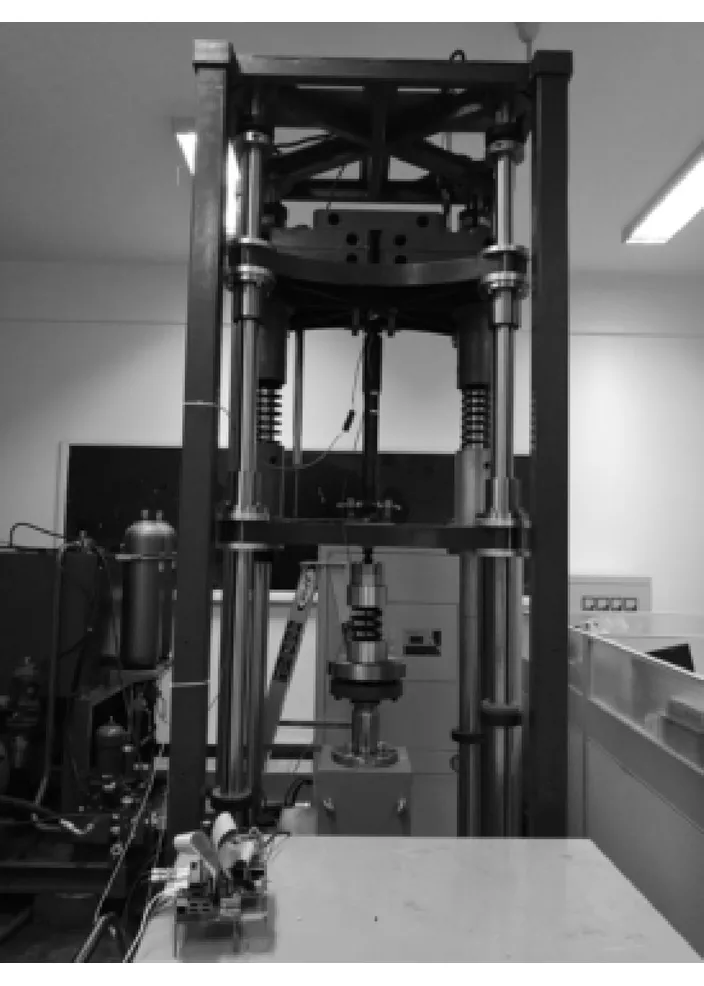
图3 悬架振动试验台架
图4 为路面激励为幅度5cm、频率1.5Hz的正弦信号时,在不同控制算法下悬架系统各评价指标的响应曲线。由图可见,在半主动控制下,车身加速度、车轮动变形和悬架动行程均明显减小,各种控制算法性能相当,其中车身加速度均约降低33%,车轮动变形降低36%,天棚半主动控制和频域控制的悬架动行程降低50%,SH-ADD控制的悬架动行程降低35%。还可看到,频域控制的波形较规整,说明分频器正确识别了系统的振动频带,而SH-ADD控制的波形出现了轻微颤振。
图5为路面激励为频率5Hz的正弦信号时,悬架系统各评价指标的响应曲线。由图可见,与被动悬架相比,频域控制下车身加速度降低了约38%,车轮动变形下降约45%;SH-ADD控制的效果与频域控制相当,但车轮动变形波动较大;天棚半主动控制反而恶化了悬架性能,使车身加速度和车轮动变形分别增大了约52%和100%。由于5Hz接近悬架动行程不动点频率,所以悬架动行程受控制影响不大[26]。鉴于人体对4~8Hz的垂直振动十分敏感,在此频带内车身加速度应尽可能小,但是天棚半主动控制反而加剧了此频带内的悬架振动,对车辆乘坐舒适性不利,这与文献[26]中的仿真结论一致。
3.2.2 三角冲击激励响应
三角形冲击常用于考察悬架系统的高频冲击响应,车身加速度峰值是重点考察指标。所用的三角形冲击激励如图6所示,相当于车辆以2m/s的速度通过高10cm、宽20cm的三角形凸块。

图4 1.5Hz正弦激励响应
图7 为三角冲击激励下的车身加速度响应,其峰值及均方根值分别为:被动悬架为 14.56和3.70m·s-2,天棚半主动控制为-17.85和 3.52m·s-2;SH-ADD 控制为-14.16 和 2.82m·s-2;频域控制为12.56和3.18m·s-2。可见,频域控制使峰值降低了13%,均方根值降低了14%;SH-ADD控制虽然没有明显降低车身加速度的峰值,但使均方根值降低了24%;天棚半主动控制下虽然车身加速度的均方根值与被动悬架相当,但峰值反而增大了22%。
3.2.3 随机激励响应
路面的空间功率谱Gxr(n)可以表示为[1]

式中:n为空间频率,即每米长度中所包含的波数,m-1;n0为参考空间频率,n0=0.1m-1;Gxr(n0)为参考空间频率n0下的路面谱值,也称作路面不平度系数,m2/m-1;W为频率指数,其值为双对数坐标上斜线的斜率,具体数值由路面功率谱的频率结构确定,一般取W=2。

图5 5Hz正弦激励响应

图6 三角冲击激励
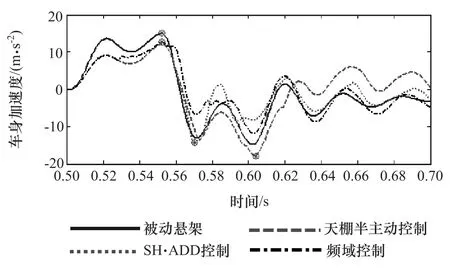
图7 三角冲击激励响应
采用谐波叠加法生成路面不平度仿真数据作为激振台的输入,其主要思想就是将路面不平度表示为一列具有随机相位的余弦级数之和:

式中:l为路面长度,m;φk为[0,2π]上的随机数,并满足均匀分布;nmid_k为空间频率区间(n1,n2)上第 k个离散小区间的中心频率;Δnk为空间频率分辨率;Gxr(nmid_k) 为空间频率 nmid_k处的功率谱密度,按式(7)计算。 将 Gxr(nmid_k)= Gxr(fmid_k) ·v 和 fmid_k=nmid_k·v代入式(8)转化为[1]
式中:Δfk为时间频率分辨率;fmid_k为频率区间(f1,f2)上第k个离散小区间的中心频率。依据式(9)即可算出车速为v时t时刻的路面高度。
根据文献[29],水泥路约相当于C级路面,乡间土路约相当于E级路面,履带车辆碾压损坏的路面相当于G级路面,本文中选用这3种有代表性的路面用于随机路面响应分析。由于路面激励系统输出的幅值限定于±150mm,将低频大幅值的路面进行滤波处理以满足限位要求。
对于越野车辆来说,随机激励响应主要考察车辆的越野机动性能,而限制车辆机动性发挥的悬架因素主要是平顺性和悬架动行程,因此以车身加速度和悬架动行程的均方根值作为悬架系统约束车辆机动性的考察指标。车身加速度均方根值的警戒值为2.5m/s2,悬架动行程均方根值的警戒值为60mm。
图8为车辆行驶于C级路面时,车身加速度均方根值和悬架动行程均方根值随车速的变化。由图可见:SH-ADD控制和频域控制有较好的控制效果,天棚半主动控制在车速较低时与被动悬架相当,但在车速较高时反而增大了车身加速度,这是因为随着车速提高,悬架的振动频率也提高,而天棚半主动控制仅在车身共振区有效,在车身共振区以上频段无效,甚至会恶化悬架性能,这与图5的结论也相吻合;从悬架动行程来看,虽因路面较好,悬架动行程的差异不大,仅2mm左右,但仍有一定的区别。SHADD控制的悬架动行程比被动悬架的稍小,频域控制需要比被动悬架更大的悬架工作空间,天棚半主动控制在低速时有利于减小悬架动行程,但在车速提高后反而会增大悬架动行程。
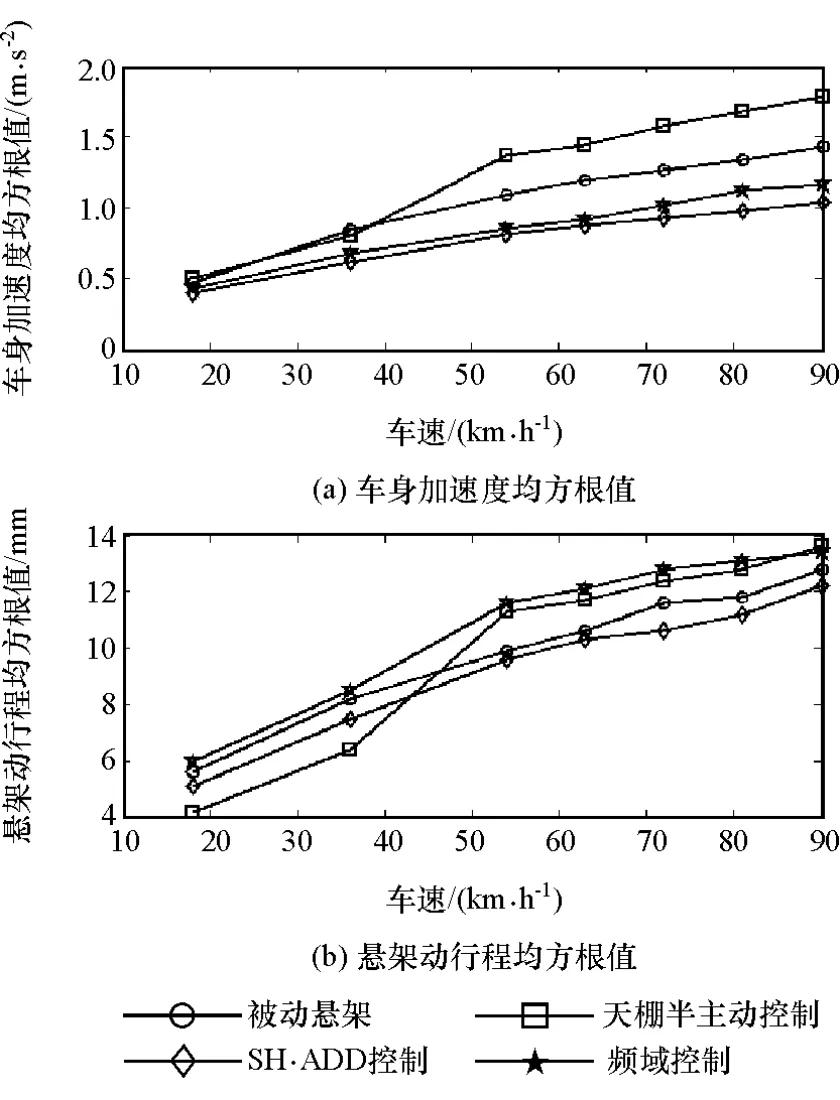
图8 C级路面机动性分析

图9 E级路面机动性分析
图9 为车辆行驶于E级路面时,车身加速度均方根值和悬架动行程均方根值随车速的变化。由图可见,被动悬架和天棚半主动控制在车速为27km/h时,车身加速度达到了警戒值,而频域控制和SHADD控制将这一车速提高到了 36km/h,提高了33%。车辆在E级路面上行驶时,悬架动行程均方根值都在警戒值以下,发生悬架击穿的概率较低,且车辆高速行驶时(40km/h以上)悬架动行程受控制算法影响不大,但在车辆低速行驶时(40km/h以下)悬架动行程在天棚控制下最小,SH-ADD控制次之。
图10为车辆行驶于G级路面时,车身加速度均方根值和悬架动行程均方根值随车速的变化。由图可见,对于恶劣的G级路面,由于车身加速度和悬架动行程都极易达到警戒值,仅测试分析车辆低速行驶的悬架性能。车辆行驶于极为恶劣的路面时,各种半主动控制策略都有一定的效果,但车身加速度在车速不到5km/h时就达到了警戒值。从悬架动行程来看,天棚半主动控制在低速行驶时对减小悬架动行程的效果非常突出,将悬架动行程极限车速从7.2km/h提高到了13km/h左右,SH-ADD控制效果次之,频域控制在恶劣路况极低车速下对降低悬架动行程效果不明显。
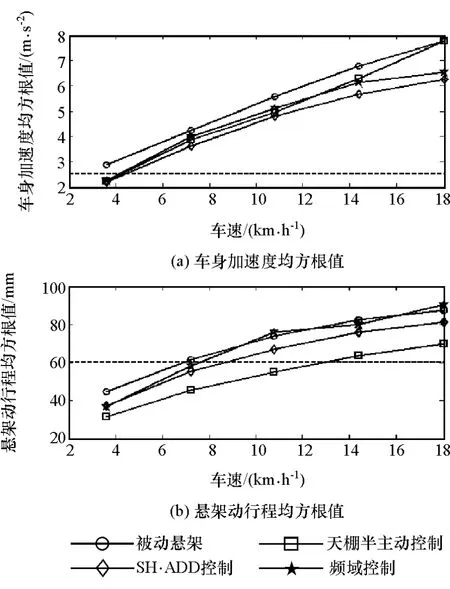
图10 G级路面机动性分析
综合图8~图10可以得到如下结论:(1)车辆在良好路面上高速行驶时,天棚半主动控制会恶化平顺性,在恶劣路面上低速行驶时,天棚控制可有效减小悬架动行程,降低悬架击穿的风险;(2)SH-ADD控制对提高车辆的平顺性效果最佳;(3)频域控制的效果略次于SH-ADD控制。
4 结论
基于车辆悬架试验台架展开了磁流变半主动悬架的性能试验与分析,得出以下结论。
(1)简单有效的控制策略是半主动悬架工程应用的前提。依据悬架的振动状态进行逻辑判断来实施阻尼调节的开关类控制策略可达到较好的控制效果。
(2)具有并联旁通孔的磁流变阻尼器与开关类控制策略结合应用时,只须在零电流和最大电流两者之间切换,而无需复杂的逆模型求解,提高了系统的响应速度,适合于工程实际应用。
(3)车辆在恶劣路面上低速(40km/h以下)行驶时,天棚控制可有效减小悬架动行程,降低悬架击穿的风险;但在良好路面上高速(40km/h以上)行驶时,天棚控制会恶化平顺性。SH-ADD控制对提高平顺性效果最佳,频域控制的效果次之,但其优势是仅须在车身上安装加速度传感器,避免了传感器安装在车轮上带来的可靠性和安全性问题。
(4)各种控制策略各有特色,可以根据实际应用情况权衡选择,或依据路况和车况在不同控制策略间切换,以达到更好的综合效果。
[1] 周长城.车辆悬架设计及理论[M].北京:北京大学出版社,2011.
[2] SAVARESI S,POUSSOT-VASSAL C,SPELTA C,et al.Semi-active suspension control for vehicles[M].Elsevier,2010.
[3] Andrea C Wray, Francis B Hoogterp, et al.Magneto-rheological fluid semi-active suspension performance testing[R].U.S.TARDECTechnical Report, NO.13882,2003.
[4] Andrea CWray, Alexander R Jimenez, et al.MRF semiactive suspension system performance testing on a stryker vehicle[R].U.S.TARDEC Technical Report, NO.15199,2005.
[5] LORD Corporation.LORD corporation awarded contract for MR suspension installation and test on U.S.army[EB/OL].http://www.caixun.com/orgarea/0000018e/00000dls/00000dmi/2425107.shtm.2010.
[6] SOLOMON U,PADMANABHAN C.Semi-active hydro-gas suspension system for a tracked vehicle[J].Journal of Terramechanics,2011,48:225-239.
[7] WANG D H,LIAO W H.Magnetorheological fluid dampers:a review of parametric modeling[J].Smart Material and Structure,2011,20:1-34.
[8] 刘志平.磁流变阻尼器示功特性畸变原因分析与试验研究[D].重庆:重庆大学,2016.
[9] 郭孔辉,隋记魁,郭耀华.基于天棚和地棚混合阻尼的高速车辆横向减振器半主动控制[J].振动与冲击,2013,32(2):18-23.
[10] 庞辉,付文强,刘凯,等.基于天棚控制的半主动悬架建模及稳定性分析[J].汽车工程,2015,37(10):1167-1173.
[11] SAVARESI S, SICILIANI E, BITTANTI S.Acceleration driven damper(ADD):an optimal control algorithm for comfort oriented semi-active suspensions[J].ASME Transactions:Journal of Dynamic Systems, Measurements and Control,2005,127(2):218-229.
[12] 郭全民,雷蓓蓓.半主动悬架PID控制的研究和优化[J].国外电子测量技术,2015,34(4):60-63.
[13] 郑玲,邓兆祥,李以农.汽车半主动悬架的模型参考自适应控制[J].中国公路学报,2005,18(2):99-102.
[14] 张志飞,刘建利,徐中明,等.基于改进层次分析法的半主动悬架LQG控制器的设计[J].汽车工程,2012,34(6):528-533.
[15] CHRISTOPH G,ANDREASS,ANDREASW,et al.Model predictive control of semi-active and active suspension systems with available road preview[C].2013 European Control Conference,2013,7:1499-1504.
[16] POUSSOT-VASSAL C,SENAME O,DUGARD L,et al.A new semi-active suspension control strategy through LPV technique[J].Control Engineering Practice,2008,16(12):1519-1534.
[17] 陈长征,贺东宇,左秋阳,等.汽车半主动悬架神经模糊融合网络控制[J].沈阳工业大学学报,2014,36(2):170-175.
[18] 严天一,闫海敬,侯兆萌,等.车辆半主动悬架粒子群模糊混合控制策略[J].农业机械学报,2013,44(8):1-7.
[19] 曾洁如,谷正气,李伟平,等.基于遗传算法的半主动悬架模糊PID 控制研究[J].汽车工程,2010,32(5):429-433.
[20] VASSAL C P,SPELTA C,SENAME O,et al.Survey on some automotive semi-active suspension control methods:A comparative study on a single-corner model[C].18thIFAC World Congress,Milan, Italy,2011.
[21] SAVARESI S,POUSSOT-VASSAL M,SPELTA C,et al.Semiactive suspension control for vehicles[M].Elsevier,2010.
[22] KASHEM S B A,EKTESABI M,NAGARAJAH R.Comparison between different sets of suspension parameters and introduction of new modified skyhook control strategy incorporating varying road condition[J].Vehicle System Dynamics,2012:1-18.
[23] SAMMIER D,SENAME O,DUGARD L.Skyhook and hinf control of semi-active suspensions:some practical aspects[J].Vehicle System Dynamics,2003,39(4):279-308.
[24] SAVARESI S,SPELTA C.Mixed sky-hook and ADD:approaching the filtering limits of a semi-active suspension[J].ASME Transactions:Journal of Dynamic Systems,Measurement and Control,2007,129(4):382-392.
[25] 彭志召.履带车辆电磁悬挂系统振动控制与能量消耗研究[D].北京:装甲兵工程学院,2014.
[26] 彭志召,张进秋,张雨,等.车辆半主动悬挂的频域控制算法[J].装甲兵工程学院学报,2013,27(4):36-42.
[27] HEDRIC J K,RAJAMANI R,YI K.Observer design for electronic suspension applications[J].Vehicle System Dynamics,1994,23(6):413-440.
[28] 彭志召,张进秋,岳杰,等.具有并联常通孔的磁流变阻尼器设计与分析[J].机械工程学报,2015,51(8):172-177.
[29] 丁法乾.履带式装甲车辆悬挂系统动力学[M].北京:国防工业出版社,2004.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年15期)2022-08-19
防爆电机(2022年3期)2022-06-17
能源工程(2022年2期)2022-05-23
建材发展导向(2022年5期)2022-04-18
同济大学学报(自然科学版)(2021年7期)2021-08-07
时代汽车(2021年1期)2021-03-03
振动工程学报(2019年5期)2019-11-27
北京汽车(2019年4期)2019-09-17
