城市环境下GPS/BDS融合伪距定位性能分析
2018-06-15 02:56王振杰
测绘工程 2018年5期
王 翀,王振杰
(中国石油大学(华东),山东 青岛 266580)
GPS能为全球用户提供高精度的导航定位服务,但在观测条件较差时,其可见卫星数、定位精度和可用性都有所下降[1-2]。随着全球导航定位服务需求量的增大,保障定位连续性和可靠性成为首要任务。理想观测条件下,GPS差分定位误差的标准差在0.3 m左右[3]。然而,在高楼密集的城市环境下,受卫星信号遮挡和多路径效应的影响,可见卫星数少、卫星星座结构不理想,导致GPS定位连续性下降[4-5]。多路径效应和非视距信号误差对定位精度的影响可达100 m[6],无法满足行人和车辆导航定位的精度要求,限制了GPS的应用领域。近年来,多模多频的导航卫星系统使得用户在复杂的观测环境下也能够获得较多的观测值和较好的卫星空间几何结构[7],从而有助于改善城市环境下的定位精度。
中国的北斗卫星导航系统BDS(Beidou Navigation System)集导航定位、授时、用户监测、短报文通信于一体,技术体制上有创新[8]。BDS已于2012年开始向亚太地区提供导航、定位和授时服务,目前已有23颗在轨卫星,2020年左右将建成覆盖全球的卫星导航系统。随着BDS的快速发展,融合BDS的多模GNSS数据统一处理已经成为卫星导航定位领域的主要发展趋势之一,多余观测量的增加能够提高单点定位和差分定位的成功率,大幅度提高定位精度,增强单一GPS的定位可靠性和稳定性[9-12]。
本文将研究GPS/BDS时空统一的转换模型及伪距定位的数学模型,基于自主编写的GNSS数据处理程序解算城市环境实测数据,并对城市环境下GPS/BDS融合定位与单系统定位的连续性和可靠性进行比较分析。
1 GPS/BDS时空系统的统一
时间系统和坐标系统是导航定位的参考基准,任何形式的导航定位都是在一定的时间和坐标框架内进行[13-14]。北斗采用的是CGCS2000国家大地坐标系统和北斗时间系统;GPS采用的是WGS-84坐标系统和GPS时间系统[15-16]。多系统融合解算前需将时间系统和坐标系统进行统一。
1.1 时间系统统一
GPS时间系统属于原子时系统,时间起算原点为1980-01-06 UTC 0时0分0秒,秒长与原子时相同。GPST不存在跳秒,与UTC的关系为
GPST=UTC+1 s×n.
(1)
式中n是UTC跳秒次数。
BDS时间系统同样属于原子时系统,时间起算原点为2006-01-01 UTC 0时0分0秒,秒长与原子时相同。BDT同样不存在跳秒,由于UTC闰秒,从1980-01-06—2006-01-01,GPST与UTC存在14 s的系统偏差,因此,BDT和GPST之间相差14 s,两者的关系为
BDT=GPST-14 s.
(2)
在GNSS融合定位中,所有卫星的观测数据都记录在一个观测文件中,时间系统采用GPST。
1.2 坐标系统统一
WGS-84坐标系统与CGCS2000国家大地坐标系在原点、尺度等方面都是相同的,参考椭球也很相近。在4个椭球常数a,GM,f,ω中,只有扁率f有微小差异。在坐标系的实现精度范围内,可以认为CGCS2000与WGS-84是一致的[17]。WGS-84、CGCS2000坐标系统参考椭球定义的大地参数见表1。

表1 WGS-84,CGCS2000坐标系统椭球参数
2 GPS/BDS伪距定位数学模型
2.1 单点定位模型
以GPS为例,伪距测量的观测方程为
(3)
(4)

将GPS,BDS双系统观测方程在测站近似位置(X0,Y0,Z0)处泰勒展开至一次项,得到误差方程为
(5)
(6)

(7)
本文中电离层延迟改正使用Klobuchar模型,对流层延迟改正使用HopField模型,观测值采用卫星高度角定权方式,为了分析单系统与多系统模式的定位差异,GPS与BDS系统间观测值等权处理。
2.2 差分定位模型
设接收机i,j在同一观测时刻对卫星p进行观测,可得伪距观测方程:
(8)
将上式中两式相减可得:
(9)

类似式(9)可写出接收机i,j同一时刻观测卫星q的单差观测方程
(10)
将式(9)与式(10)相减,在卫星p与卫星q的单差观测方程基础上求二次差为

(11)

(12)
(13)
由最小二乘估计可以求解未知参数阵中的3个坐标差参数。
3 实测数据分析
本文数据源自香港地区车载实测数据,数据采集采用Trimble R10接收机。香港地区具有信号遮挡强、多路径效应明显等典型城市环境特点,数据概况见表2。数据处理基于Visual C+平台编写GNSS多系统融合伪距定位程序,对实测数据分别以GPS单系统、BDS单系统、GPS/BDS双系统融合3种模式进行单点、差分定位解算,基准站为HKST站,卫星截止高度角为10°。实验路线见图1。

表2 实测数据概况
图1 实验路线
3.1 可见卫星数和PDOP值
根据原始数据得到观测时段内GPS,BDS和双系统融合3种模式的可见卫星数信息,如图2(COM代表双系统融合模式),双系统融合可见卫星数相比单系统有显著增加,受城市复杂观测环境的影响,呈现出一定的波动性。图3给出空间位置精度因子PDOP值,双系统融合的PDOP值均小于单系统,可见PDOP值和卫星数呈反相关关系,PDOP值越小,对应的可见卫星数越多,星座结构越合理。因此,多系统较单系统有着更合理的卫星分布和更高的定位精度。观测时段内可见卫星数、PDOP值的平均值如表3所示。3种模式PDOP值均值均大于3,可见在城市复杂环境下定位精度低于开阔环境。
图2 GPS/BDS/系统融合可见卫星数
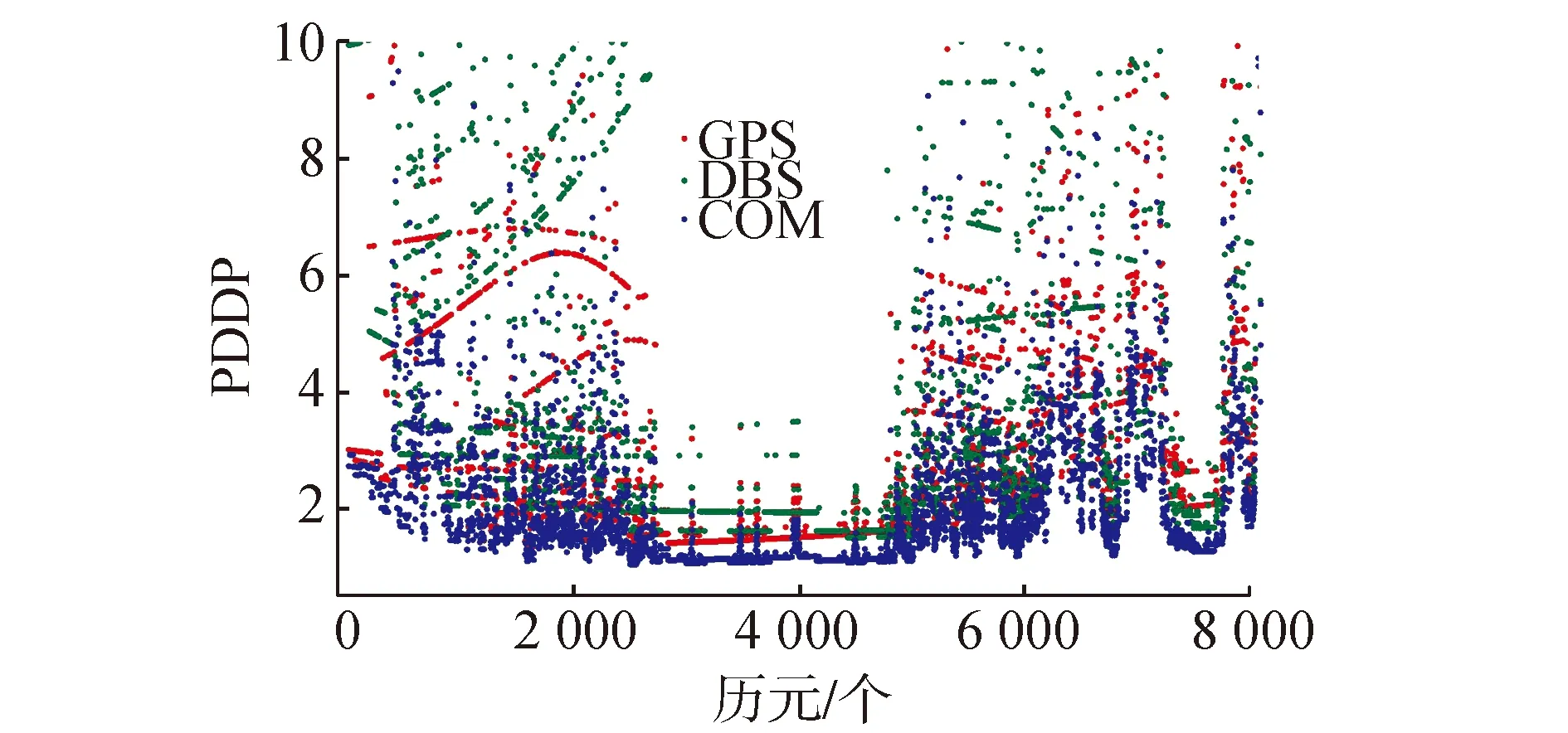
图3 GPS/BDS/系统融合PDOP值
定位系统可见卫星数/颗PDOP(平均值)(平均值)GPS6.065.46BDS6.976.45COM13.093.54
3.2 定位连续性和可靠性
经计算统计,观测时段内3种模式单点、差分定位的连续性指标如表4所示,本文统计的定位连续性即能够解得定位结果的历元数占全部观测历元的百分比。可见,GPS定位连续性高于BDS,两者均小于双系统融合模式。造成此现象的原因为:虽然整体上BDS可见卫星数多于GPS,但BDS星座结构比GPS略差,在城市复杂环境中无法保证足够可见卫星数,导致BDS定位连续性低于GPS;差分定位连续性低于单点定位的原因为:选取单基准站,无法保证同步观测流动站所有可视卫星,导致公共卫星少于流动站可见卫星。受城市复杂观测环境的影响,双系统融合模式定位连续性也无法达到100%。
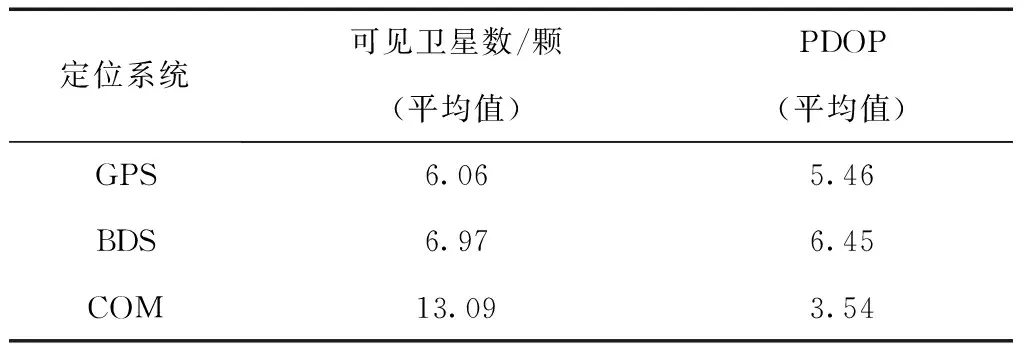
单系统和双系统组合模式单点、差分定位的RMS值如图4、图5,其中3种模式在第2500—5000历元内的RMS值均较稳定,在其它历元内波动明显,结合图2、图3可以明显看出在可见卫星数多,PDOP值较小的城市开阔环境中,定位可靠性较高,而在城市复杂环境中, 定位精度存在明显波动, 导致定位可靠性大幅度降低。结合表5可以看出双系统融合定位精度相比于单系统有小幅度提高,主要是由于多系统融合增加了空间可见卫星数,改善卫星空间几何结构,降低PDOP值。但城市环境中多路径效应等误差明显,仅通过多系统融合无法明显提高定位精度。

表4 定位连续性统计
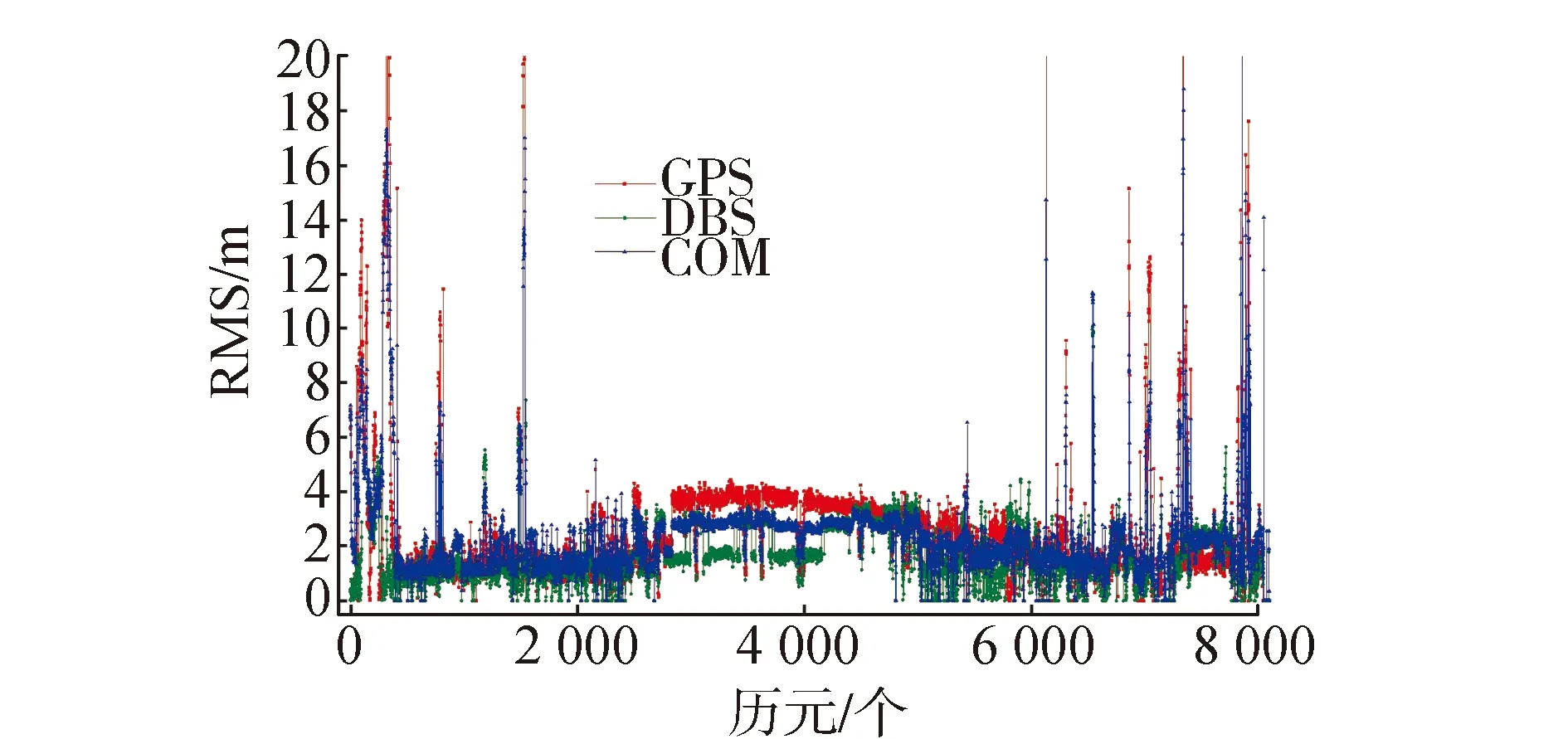
图4 GPS/BDS/系统融合单点定位RMS
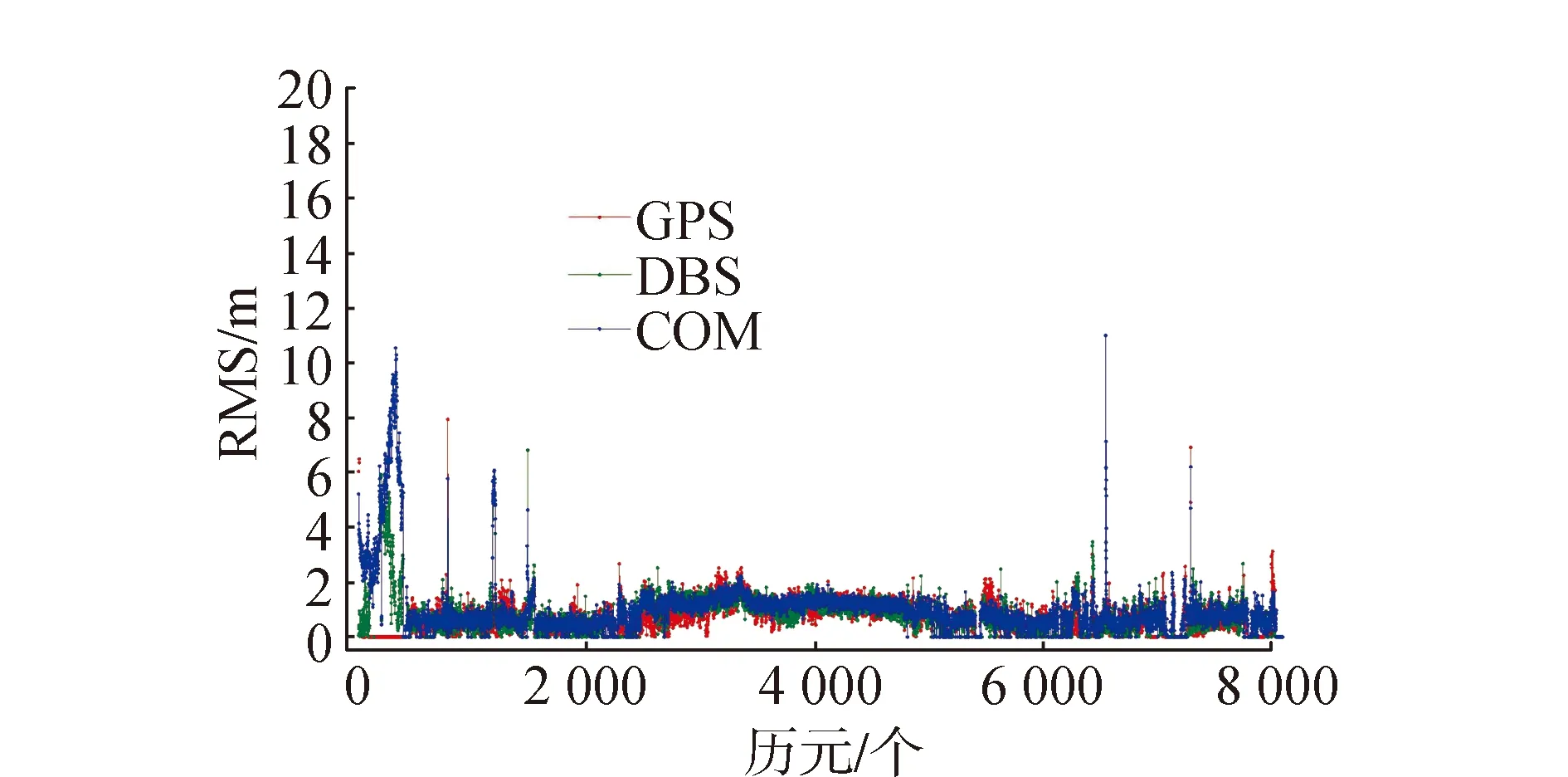
图5 GPS/BDS/系统融合差分定位RMS

定位方式单点定位差分定位卫星系统GPSBDSCOMGPSBDSCOMRMS均值/m2.681.982.421.231.361.01RMS最大值/m28.3310.0624.057.936.819.65
4 结束语
观测环境的优劣对卫星定位结果有着显著影响。本文利用香港地区城市环境实测数据对BDS/GPS双系统融合伪距定位结果与GPS、BDS单系统在可见卫星数、PDOP值、定位连续性、可靠性等方面进行比较分析,得到以下结论:
1)城市环境建筑物数量多、密度大、信号遮挡强、多路径效应明显等特点导致定位结果误差大,定位连续性差、可靠性低。
2)多系统融合增加单一系统的观测卫星数,改善卫星相对于测站的空间几何分布,有效减小PDOP值,提高系统冗余性。
3)多系统融合明显改善城市环境下定位的连续性,单点定位连续性提升至97.77%,差分定位连续性提升至92.52%,说明多系统融合定位在城市环境下的优越性。
相比于单系统,多系统融合小幅度提高城市环境定位精度,综合考虑城市环境中多路径效应等误差将进一步提高定位精度。下一步工作将针对城市环境多路径效应展开研究。
[1] 王泽民,孟泱,伍岳,等. GPS、Galileo及其组合系统导航定位的DOP值分析[J]. 武汉大学学报(信息科学版), 2006, 31(1):9-11.
[2] 唐卫明,徐坤,金蕾,等. 北斗/GPS组合伪距单点定位性能测试和分析[J]. 武汉大学学报(信息科学版), 2015, 40(4):529-533.
[3] REZAEI S, SENGUPTA R. Kalman Filter-Based Integration of DGPS and Vehicle Sensors for Localization[J]. IEEE Transactions on Control Systems Technology, 2007, 15(6):1080-1088.
[4] HSU L T, CHEN F, KAMIJO S. Evaluation of Multi-GNSSs and GPS with 3D Map Methods for Pedestrian Positioning in an Urban Canyon Environment[J]. Ieice Transactions on Fundamentals of Electronics Communications & Computer Sciences, 2015, E98.A (1):284-293.
[5] YANLEI G, LI-TA H, SHUNSUKE K. Passive Sensor Integration for Vehicle Self-Localization in Urban Traffic Environment[J]. Sensors, 2015, 15(12):30199-220.
[6] MACGOUGAN G, LACHAPELLE G, KLUKAS R, et al. Performance analysis of a stand-alone high-sensitivity receiver[J]. GPS Solutions, 2002, 6(3):179-195.
[7] 张丽. GNSS接收机多系统兼容定位算法研究与实现[D]. 北京:北京理工大学, 2014.
[8] 杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J]. 测绘学报,2010(1):1-6.
[9] 宁津生,姚宜斌,张小红. 全球导航卫星系统发展综述[J]. 导航定位学报, 2013,1(1):1-6.
[10] 李鹤峰,秘金钟,党亚民,等. 基于CORS的多基准站BDS/GPS融合差分网定位性能分析[J]. 大地测量与地球动力学, 2014(6):81-85.
[11] 周万振,秘金钟,李得海,等. BDS/GPS/GLONASS融合网格伪距差分定位性能分析[J]. 测绘科学, 2016, (12):5-9.
[12] 李敏. 多模GNSS融合精密定轨理论及其应用研究[D]. 武汉: 武汉大学, 2011.
[13] 高星伟,过静珺,程鹏飞,等. 基于时空系统统一的北斗与GPS融合定位[J]. 测绘学报, 2012, 41(5):743-748.
[14] 李鹤峰,党亚民,秘金钟,等. BDS与GPS、GLONASS多模融合导航定位时空统一[J]. 大地测量与地球动力学, 2013, 33(4):73-78.
[15] 陈俊勇,杨元喜,王敏,等. 2000国家大地控制网的构建和它的技术进步[J]. 测绘学报, 2007, 36(1):1-8.
[16] 程鹏飞,文汉江,成英燕,等. 2000国家大地坐标系的椭球参数及其与GRS80和WGS84的比较[J]. 测绘学报, 2009, 38(3):189-194.
[17] 魏子卿. 2000中国大地坐标系及其与WGS84的比较[J]. 大地测量与地球动力学, 2008, 28(5):1-5.
[18] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社, 2005.
猜你喜欢
城市勘测(2022年6期)2023-01-30
导航定位学报(2022年5期)2022-10-13
数学年刊A辑(中文版)(2020年2期)2020-07-25
新世纪智能(语文备考)(2019年12期)2020-01-13
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
雷达学报(2017年1期)2017-05-17
厦门理工学院学报(2016年1期)2016-12-01
中学生数理化·七年级数学人教版(2016年4期)2016-11-19