模块化轮指式高压线巡检机器人
2018-06-15 02:19叶长龙闫法兵姜春英于苏洋沈阳航空航天大学机电工程学院沈阳110136
沈阳航空航天大学学报 2018年2期
叶长龙,闫法兵,姜春英,于苏洋(沈阳航空航天大学 机电工程学院,沈阳 110136)
随着社会的发展,电力系统已成为人们生活必不可少的一部分,因此电力线路可以说是人们生活保障的“生命线”。而架设在户外的高压架空线路,却因长期处在复杂环境中,易老化破损,散股,金具松脱等问题,所以需要定期巡检。由于人工巡检效率低,危险程度高,直升机巡检的费用高,所以各研究机构专家学者对高压线输电线路的巡检进行了深入研究。加拿大、美国、日本等国家早期就开展了相关研究,但此时的机器人巡检作业需要人工参与,且仅能完成两线塔之间的巡检或除冰工作[1-4]。2008年,伊朗seaman大学研制了机器人MOBOLAB[5],它通过3个带有滚轮的夹爪在导线上移动,越障时通过夹爪的升降、移动以避开障碍物。缺点是整体尺寸较大,适应性低。2014年,伊朗的伊斯法罕电气公司研制出用于高压线检测的机器人[6],该机器人主要通过调整垂直橡胶辊子和水平橡胶棍子的位置进行越障。由于框架式结构的限制,该机器人仅能越过防震锤等下悬式障碍物。2015年,巴西联邦大学研制出高压线移动巡检机器人的样机[7],它由4个曲柄滑块机构组成的两对相同的腿构成,该机器人仅用一个驱动电机使腿式机构移动,但是该机器人对线缆适应性较差。国内的研究起步于武汉大学、中国科学院自动化所等机构,后期经过与电力部门合作,使得巡检机器人的研究快速发展。例如,2007年,上海大学研制出高压导线巡检机器人[8-9],该机器人运用了知识库和传感器在线监测以实现自主越障。2012年,沈阳自动化研究所提出了一种四轮双臂移动机器人,阐述了4种越障方式[10-11]。2013年,房立金等[12]提出了一种带柔锁的双臂式巡检机器人,验证了柔锁在越障过程中可以降低手臂关节的转矩。2015年,叶长龙,高露等[13]开发了具有相对运动的三臂高压线巡检机器人。通过驱动前后手臂与中间手臂的相对垂直运动及相对转动,进行越障作业。同时,手臂的相对运动,使机器人适应了高压线的曲率变化。2016年,王吉岱等[14]提出了仿灵长动物运动原理与现代设计方法相结合的新型巡检机器人,该机器人可越过非直线段障碍物。2017年,王婷,吴功平等[15]提出了穿越式巡线机器人,并设计出自动上下线装置。2017年,胡亚南,马书根等[16]提出了一种与模块呈线性复杂度的高新重构规划方法,用于移动型模块化机器人设计。
综合以上讨论与分析,巡检机器人多采用臂式越障机构,其越障效率低,环境适应能力较差。结合高压线环境,本文采用仿生原理与传统机构相结合,提出新型越障机构,设计出巡检机器人。对越障步骤和线缆曲率适应性进行了分析,并介绍了控制系统。最后针对线缆曲率适应性做了实验,结果验证了越障机构与巡检机器人的可行性。
1 机器人机构
1.1 轮指移动模块
通过观察浣熊倒挂攀爬树枝的动作,仿生出四肢攀爬原理,并形成一个模块。将模块进行串联组合形成一个整体巡检机器人,从而实现一档内高压线上的快速移动与越障。攀爬简图如图1所示。
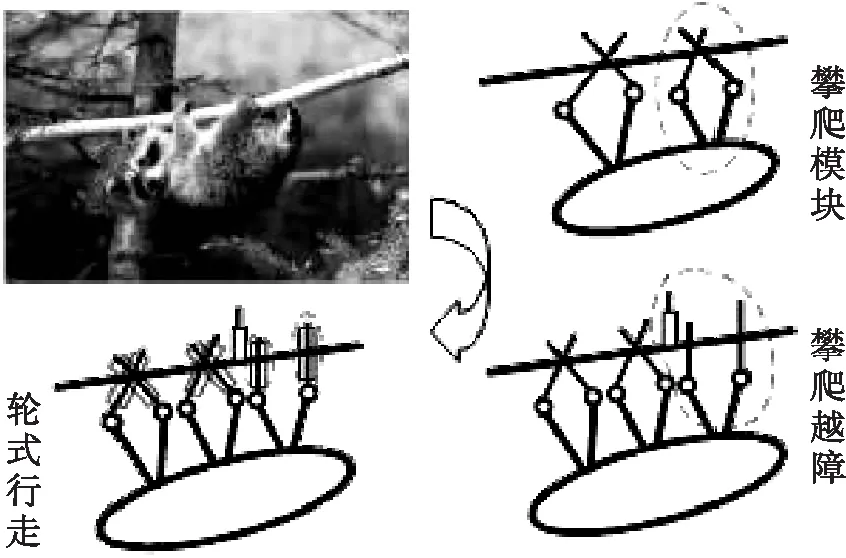
图1 机构运动原理
将攀爬仿生原理与传统轮式相结合提出轮指移动机构。其中指形结构是从浣熊倒挂树枝时的攀爬动作获得的启发,提出的抓取式越障的机构。为提高机器人整体在线缆上的移动速度,增加驱动力,在抓取指上设计了聚氨酯滚轮,形成轮指移动机构。如图2所示。
轮指移动模块具有行走及越障功能,需要两个驱动机构:一是越障开合驱动机构,另一个是轮式行走驱动机构。越障开合机构是由对称四杆机构演变得到,包括轮指、连杆1、连杆2、丝杠副和越障开合驱动电机。越障开合驱动机构通过丝杠副带动连杆使轮指绕定轴旋转,执行打开和关闭,该机构在开合过程中可自动调整机构抓取的高度,以实现上下位置的调整和适应线缆曲率的变化。行走驱动系统是由行走驱动电机、带传动和齿轮传动组合而成。行走驱动机构通过带传动和齿轮传动驱动机器人在线缆上的前后移动。由于轮指移动模块中的轮指移动机构和开合驱动机构外形像手指,且手指末端可以转动,因此称为轮指机构,如图3所示。轮指机构包含一个曲柄滑块机构和滚动手指。
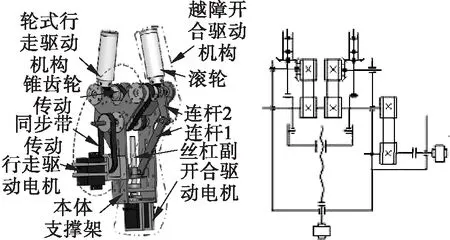
图2 轮指移动模块三维模型及机构简图

图3 轮指机构
1.2 模块化组合机构
轮指移动的模块化设计使安装组合更简单,通过3个模块的组合,可组成一个具有越障能力的巡检机器人。模块化组合的巡检机器人机构简图,如图4所示。3个模块组合后,将轮指的滚轮驱动通过串联方式联结后,采用一个驱动电机驱动,使行走速度一致。模块化组合的巡检机器人整体机构如图5所示。
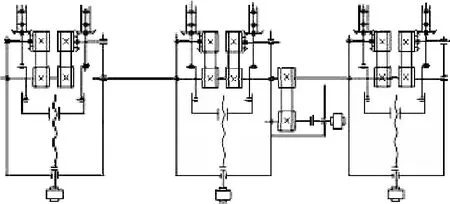
图4 巡检机器人机构简图

图5 巡检机器人整体结构
该巡检机器人在一档内的高压线路上可以快速越过常见的障碍物,如悬垂绝缘子串、悬垂线夹、防震锤等。图6所示为巡检机器人巡检作业路径示意图。该巡检机器人作为初代研究成果,目前解决在一档内的越障问题,图7为机器人功能样机,其具体参数见表1所示。

图6 巡检作业路径示意图
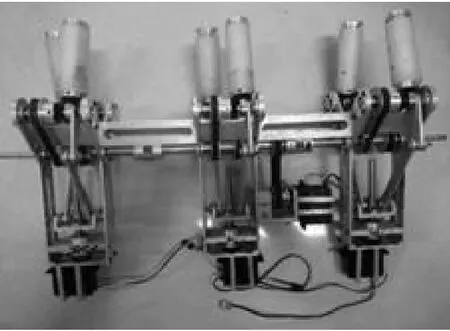
图7 巡检机器人样机
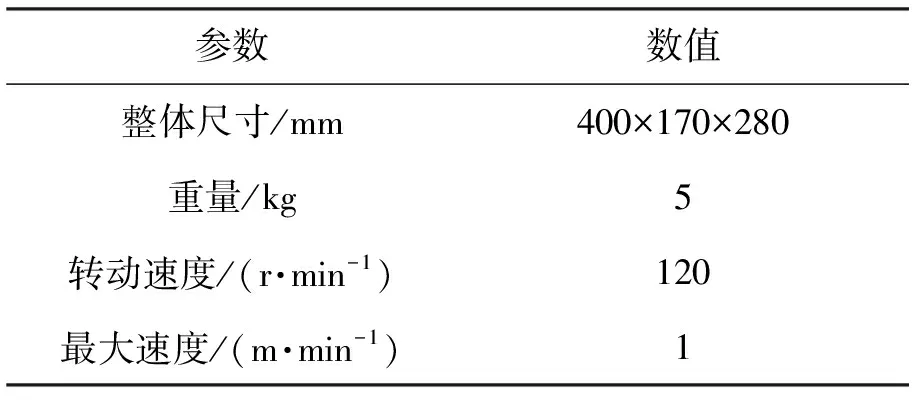
表1 机器人样机的结构与性能参数
2 线缆曲率适应性分析
2.1 巡检机器人的越障过程
巡检机器人通过3个指形机构的依次顺序打开与闭合,可以顺利完成越障动作。以跨越绝缘子串为例,越障过程如图8所示。以下是巡检机器人越障过程分析:
(1)第一模块打开,第二、三模块调整位姿,机器人前进,其状态如图8a所示;
(2)第一模块闭合,第二模块打开,第一、三模块调整位姿,机器人前进,其状态如图8b所示;
(3)第一、二模块闭合,第三模块闭合,第一、二模块调整位姿,机器人前进,状态如图8c所示;
(4)第一、二、三模块闭合,机器人顺利完成越障。如图8d所示。
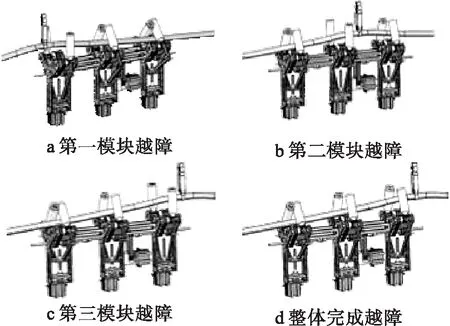
图8 巡检机器人越障步骤
巡检机器人不仅能实现线缆的攀爬和跨越障碍物,而且能适应高压线两个平面上的线缆形状的变化;一个是垂直面内,线缆自重造成线缆的曲率变化;另一个是水平面内,由于金具位置造成线缆转向曲率变化,如图9所示。

图9 高压线两种曲率形态
2.2 线缆曲率适应性分析
轮指移动模块的工作空间如图10a所示的蓝线围成的区域,机器人的整体抓线空间为图10b显示的范围。因此,在水平面和垂直面内,线缆可以在上半区域内任意位置。相应的轮指机构夹持线缆,同时适应了线缆。

图10 越障机构的工作空间及机器人工作空间
巡检机器人遇到障碍物后,调整各模块越障机构的开合角度,以适应线缆曲率变化。轮指移动模块的两轮指交错相邻布置,且相距距离较近,可近似认为两指杆交叉。取第二模块两指杆根部连线的中点为原点O,以O点直线第一模块为X轴正方向,以O点垂直向上为Z轴正方向,建立笛卡尔坐标系,如图11所示。轮指与线缆的交叉点分别为A、B、C。
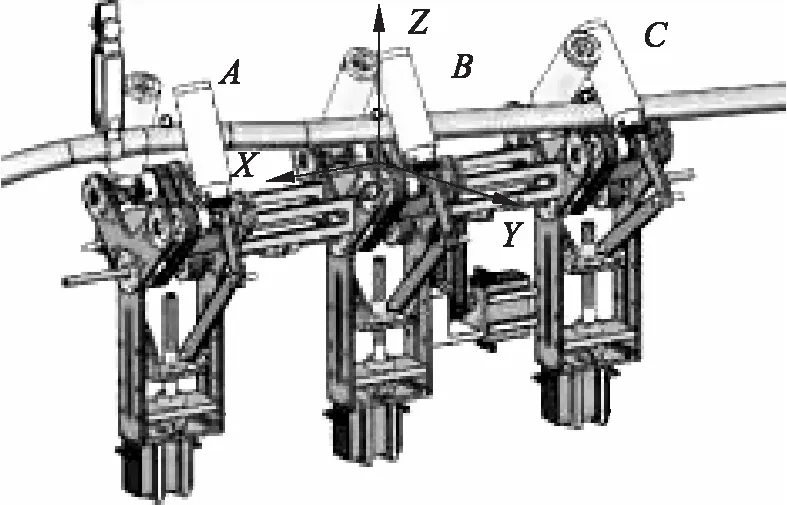
图11 巡检机器人坐标系
各模块的轮指机构开合角度分析:
机器人在越障过程中,需要对各模块的轮指机构开合角度进行调整。由于机器人尺寸相对线缆长度尺寸较小,假设机器人第一模块和第三模块之前的线缆为直线,因此A、B、C三点的斜率应与线缆相同。整理后得
2h2=h1+h3
(1)
其中
(2)
式中,h为各轮指机构夹持线缆时,线缆距离原点O的距离。
将式(2)代入到式(1)即可导出3个轮指移动模块开合角度关系
2L2b-4pd+L2tanα3-2qd=L2a-2md
(3)
式(3)中,
α1,α2,α3为轮指移动模块轮指开合角度;L2为指杆长度;R为滚轮半径;r为线缆的半径。
垂直面内曲率适应性分析:
巡检机器人在垂直面内进行线缆上越障作业时,适应的最大曲率是两端的模块的工作空间处于极限位置时,第一模块指杆顶端夹持住线缆,第三模块指杆末端夹持住线缆。设机器人在垂直面内适应的最大角度为k1,即
(4)
式(4)中,L3为两轮指移动模块之间距离。
水平面内曲率适应性分析:
巡检机器人在水平面内进行线缆上越障作业时,适应的最大曲率是轮指开合最大限度时轮子内侧恰好与线缆相切。尺寸关系如图12所示。

图12 水平面内机器人尺寸关系
设机器人在水平面内适应的最大角度为k2,即
(5)
由于机器人结构限制,在大尺度转向和爬坡越障时具有一定困难,但可满足一类小尺度转向和小角度爬坡越障线路。
3 控制系统设计
根据巡检机器人的功能,机器人的控制系统包括:控制器、驱动系统、感知系统、电源系统。控制器选用Arduino mega2560,其特点是具有大量接口,适用于大量I/0接口的设计。感知系统包括3个光电开关、一个陀螺仪和一个摄像头,每个轮指移动模块各安装一个光电开关,陀螺仪布置在中间轮指移动模块上。另外4个20W的直流电机组成驱动系统,系统采用9V锂电池供电。其控制系统如图13所示,巡检机器人作业过程如图14所示。根据所设计的控制系统,开发了基于MATLAB平台的操作系统,其运行界面如图15所示。
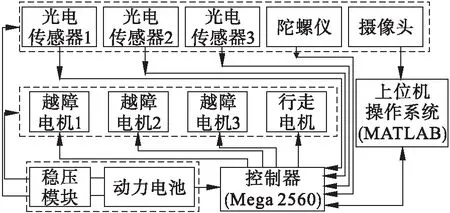
图13 控制系统图
4 实验
为验证所设计机构的合理性,应用轻型铝合金材料制作了小结构的功能样机。并搭建了模拟的高压线环境,建立了障碍物环境,如图16和图17所示。该环境中有防震锤、绝缘子串、水平面内的曲线形状和垂直面内的曲线形状。通过实验,得出该功能样机能够越过防震锤、绝缘子串障碍物,能够适应两个平面内的线缆曲率变化。
5 结论
本文通过仿生原理,提出了轮指式移动模块结构。并可通过模块的串联,组合成一种新型高压线巡检机器人。机器人能较好的适应线缆环境,可在水平面内和垂直面内适应线缆曲率的变化。对该模块化高压线巡检机器人的适应能力做了详细分析。同时开发了功能样机,并模拟实际应用环境做了机器人的初步实验。实验表明该机器人能够跨越防震锤、绝缘子串等障碍物。并能够适应两个平面内高压线缆曲率的变化,具有较强的环境适应能力和线上驱动能力,应用前景较好。

图14 巡检机器人作业过程

图15 巡检机器人作业过程

图16 垂直面内跨越障碍并适应曲率变化的过程
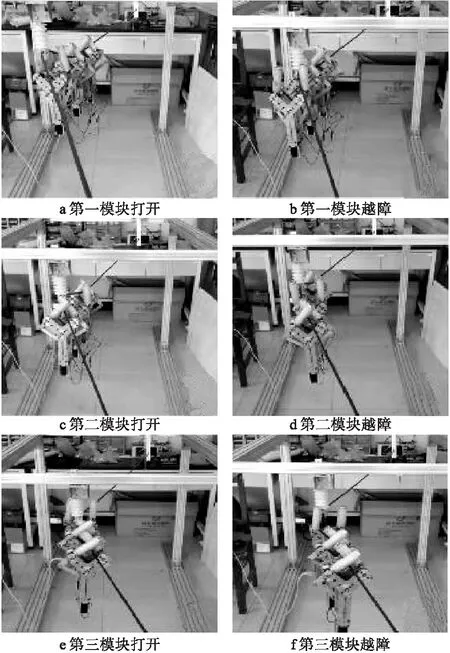
图17 水直面内跨越障碍并适应曲率变化的过程
参考文献(References):
[1] SAWADA J,KUSUMOTO K,MUNAKATA T,et al.A mobile robot for inspection of power transmission lines[J].IEEE Power Engineering Review,1991,11(1):57.
[2] DEBENEST P,GUAMIERIM,TAKITA K,et al..Expliner-Robot for inspection of transmission lines[C].Intermational Conference on Robotics and Automation,2008:3978-3984.
[3] MONTAMBAULT S,COTE J,ST.LOUIS M.Preliminary results on the development of a teleoperated compact trolley for live-line working[C]// IEEE Esmo-2000 IEEE,International Conference on Transmission and Distribution Construction,Operation and Live-Line Maintenance Proceedings.IEEE,2000:21-27.
[4] MONTAMBAULT S,POULIOT N.The HQ LineROVer:contributing to innovation in transmission line maintenance[C]// IEEE,International Conference on Transmission and Distribution Construction,Operation and Live-Line Maintenance,2003.2003 IEEE Esmo.IEEE,2003:33-40.
[5] PINTO J K C,MASUDA M,MAGRINI L C,et al.Mobile robot for hot spot monitoring in electric power substation[C]// Transmission and Distribution Conference and Exposition,2008.T&D.IEEE/PES.IEEE,2008:1-5.
[6] MOSTASHFI A,FAKHARI A,BADRI M A.A novel design of inspection robot for high-voltage power lines[J].Industrial Robot,2014,41(2):166-175.
[7] GONÇALVES R S,CARVALHO J C M.A mobile robot to be applied in high-voltage power lines[J].Journal of the Brazilian Society of Mechanical Sciences & Engineering,2014,37(1):1-11.
[8] ZHIBIN R,YI R,YONG Y,et al.Control of inspection robot for the power transmission lines based on database[C]//2008 27th Chinese Control Conference.IEEE,2008:281-285.
[9] 任志斌,阮毅.架空输电线路巡检机器人的空间定位方法研究[J].机床与液压,2008,36(3):66-69.
[10]郭伟斌,王洪光,凌烈,等.一种四轮双臂巡检机器人越障特性分析[J].机械设计与制造,2012(10):167-169.
[11]郭伟斌,王洪光,姜勇,等.一种输电线路巡检机器人越障规划方法[J].机器人,2012,34(4):505-512.
[12]房立金,魏永乐,陶广宏.一种新型带柔索双臂式巡检机器人设计[J].机器人,2013,35(3):319-325.
[13]叶长龙,高露,余雪,等.三臂结构高压线巡检机器人设计与运动学仿真效果研究[J].沈阳农业大学学报,2015,46(1):79-84.
[14]WANG J,LIU X,LU K,et al.A new bionic structure of inspection robot for high voltage transmission line[C]// International Conference on Applied Robotics for the Power Industry.IEEE,2016:1-4.
[15]王婷,吴功平.穿越式巡线机器人自动上下线装置设计[J].机械设计与制造,2017(5):245-248.
[16]胡亚南,马书根,李斌,等.移动型模块化机器人的高效重构规划方法[J].机器人,2016,38(4):467-474.
猜你喜欢
乐府新声(2021年3期)2021-11-04
艺术品鉴(2021年12期)2021-05-25
躬耕(2020年2期)2020-03-16
汽车电器(2019年9期)2019-10-31
戏剧之家(2019年32期)2019-01-06
剑南文学(2016年18期)2016-11-21
现代防御技术(2016年1期)2016-06-01
火控雷达技术(2016年2期)2016-02-06
中国品牌(2015年11期)2015-12-01
青少年科技博览(中学版)(2006年6期)2006-06-08