时变信道下车载HDAF协作通信误码性能分析
2018-06-11 06:56肖海林聂在平金晓晴
电子科技大学学报 2018年3期
邱 斌,肖海林,聂在平,金晓晴
(1. 桂林电子科技大学认知无线电与信号处理教育部重点实验室 广西 桂林 541004;2. 桂林理工大学信息科学与工程学院 广西 桂林 541004;3. 电子科技大学电子科学与工程学院 成都 611731)
中继协作通信技术可用于增强通信链路的可靠性、连通性,扩大覆盖范围,实现空间分集[1-2]。将中继协作通信技术应用于智能车载系统中可提高交通效率,提升交通安全指数[3-7]。
在智能车载协作通信系统中,车辆快速移动带来系统的信道时变特性,文献[8]在中继协作网络中利用AR1模型表示因反馈延时导致的过时信道估计特性,文献[9-10]采用AR1模型刻画不完好信道估计条件下的时变衰落信道,分析了中继协作系统中的平均误码率性能。然而,以上文献并未用AR1模型准确刻画不同节点运动速度下信道的时变特性,且未分析节点移动速度和信道状态信息(CSI)估计精度对误码率的影响。实际上,车载系统通常采用通信误码率作为评估系统可控性安全的关键指标,且很大程度上取决于中继的协作方式[11-13]。中继协作通信最基本的协作方式分为两种:放大转发(AF)和解码转发(DF)[6,12-14]。AF协作方式复杂度较低,但中继节点在对源节点信号放大的同时也对噪声进行了放大,如此导致误码性能下降[6]。DF协作方式中继节点对接收的信号译码后重新编码转发,可有效消除噪声,但易导致差错传播。
近年来,很多文献研究了基于混合译码放大转发(HDAF)协作方式的中断概率和误码率性能[12-14],验证了HDAF协作方式相对AF和DF协作方式的优越性。HDAF协作方式下中继节点通过合理设置信噪比门限,即可采取AF实现分集增益,又可通过DF实现编码增益。然而,上述文献中假设各通信链路均为准静态瑞利(Rayleigh)衰落,未考虑节点快速移动带来的信道时变特性对系统误码性能的影响。文献[15]在宽带时变车载系统中利用AF和空时编码技术,研究了正交幅度调制系统的误码性能。文献[16]在多中继DF协作网络中分析了正交相移调制下,多普勒频偏对时变信道误码率的影响。以上文献中继节点采用固定的AF或者DF协作方式,不能根据源-中继节点间的信道增益自适应选取协作方式,未考虑将HDAF协作方式应用于车载时变网络分析通信误码性能。
综合以上考虑,本文针对车辆快速移动带来的信道时变特性,建立结合多普勒频偏相关系数的AR1时变信道模型,刻画节点移动速度和CSI估计精度对误码率的影响。针对时变信道下传统AF和DF协作方式适用性较差的问题,采用自适应车辆时变信道特性的HADF协作方式,提升智能车载协作通信系统的误码性能。
1 系统和时变信道模型
本文构建的三节点智能车载协作通信系统模型如图1所示[6],标号S、R、D分别代表源、中继和目的车辆节点,各节点链路之间相互独立。假设各链路的信道增益包络服从Rayleigh分布,当两节点之间不存在相对运动时,表现为准静态衰落,反之为时变衰落特性[10]。每辆车节点装有收发车载单元,系统采用半双工通信方式。假设车载收发单元采用块传输,N个码元符号组成一帧数据,且各码元符号独立传输。第k(1 ≤k≤N)个码元符号采用两个时隙进行协作传输。第一时隙,中继和目的车辆节点分别接收到的广播信息表示为:

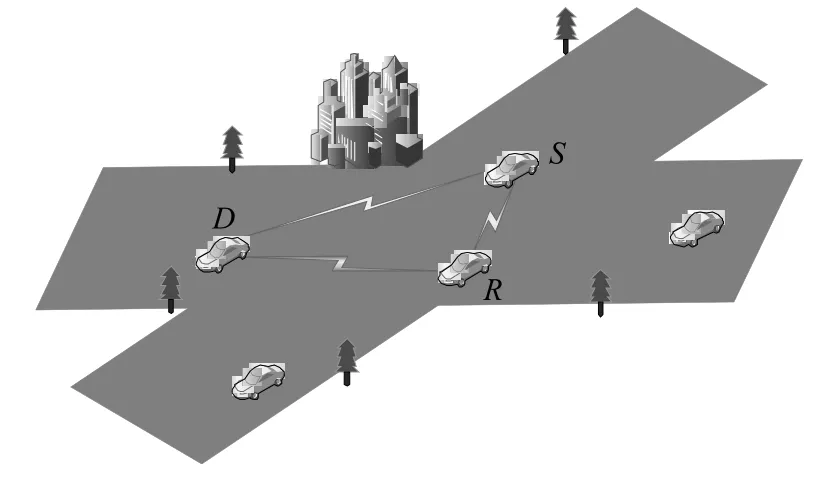
图1 智能车载协作系统模型
式中,Ps为源节点S传输一帧数据的平均功率;x(k)表示源节点广播的信息;ysr(k)和ysd(k)分别代表中继车辆节点R和目的车辆节点D收到的广播信息。第二时隙,如果中继节点R工作在AF方式,目的节点接收到的信息为:

如果中继节点R工作在DF方式,目的车辆节点接收到的信息为:

式中,PR为中继车辆节点R的平均发射功率;xˆ(k)表示R译码转发的信息;nsr(k),nsd(k)和nrd(k)表示相应链路的复高斯随机噪声(additive white Gaussian noise, AWGN),相互独立同分布,服从CN( 0,N0);β(k)为AF协作模式下中继放大倍数[10]:

式中,为时变信道增益平方的均值;hsr(k),hsd(k)和hrd(k)分别表示第k个码元符号的复高斯衰落系数,符合AR1模型[6],表述为[9-10]:

式中,表示信道增益的变化部分,服从为AR1模型中ab链路的时变信道多普勒频偏相关系数;假设ρab服从Jakes模型[15,17]:
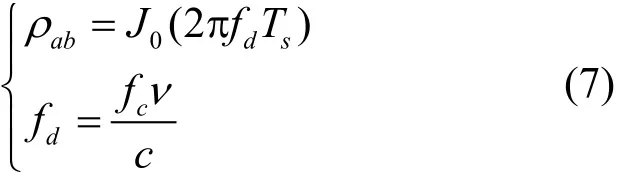
式中,J0(⋅)表示第一类零阶贝塞尔函数;Ts为码元符号周期;fc为载波频率;fd为最大多普勒频偏;ν为节点之间的相对运动速度;c为光传播速度[6]。
假设车载协作系统中车辆高速移动引起信道快速时变,接收端的跟踪回环通过相应的导频技术仅能够完好地估计每帧数据的第一个符号的信道增益hab(1)[6]。为量化跟踪回环捕获CSI的能力,本文假设CSI估计精度为1/N× 1 00%。式(6)通过迭代,第k个码元符号的信道增益可描述为:

由于可简化为服从分布,所以hab(k)可表示为如下复高斯随机过程:

假设等功率分配,将式(9)代入式(1),并由nab(k) ∼CN( 0,N0)可知,ysd(k)可简化为服从分布[10]:

此时sd链路的瞬时信噪比可进一步表示为[9]:

同理,sr和rd链路的瞬时信噪比分别表示为:
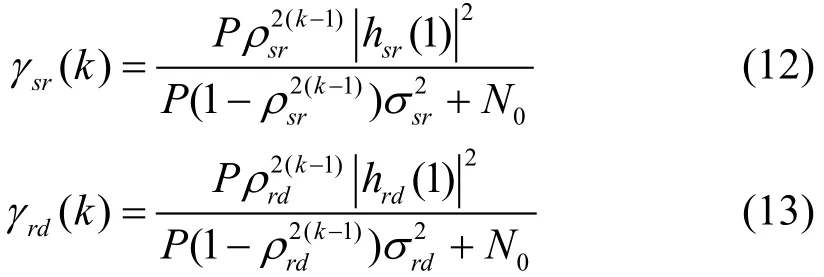
式(11)~式(13)中,服从指数分布且均值;ρab∈ [ 0,1]为路径损失因子[12];dab表示ab节点之间的距离;γab(k)服从指数分布,其概率密度函数可表示为:

其平均信噪比可表示为:

当ρab=1时,表示链路为准静态Rayleigh衰落,与码元符号的位置k无关[6]。
2 HDAF车载协作系统平均误码率分析
智能车载协作系统中,误码率是评估其可控性安全的关键指标。为自适应车载协作通信中信道时变特性,满足安全信息传送高可靠性要求。本节推导了车载HDAF协作方式下多进制正交幅度调制(M-ary quadrature phase shift keying, M-QAM)信号关于CSI估计精度和速度影响的平均误码率(average symbol-error-rate, ASER)表达式。
在HDAF中继协作策略中,中继R的协作方式取决于S-R链路的瞬时信噪比和中继节点设置的门限值Γ,当S-R链路的瞬时信噪比γsr(k)低于门限值Γ时,采用AF协作方式,反之采用DF协作方式。所以在HDAF中继协作方式下,第k个符号的误码率表达式可表示为[12,14]:

目的节点采用最大比合并(maximum ratio combining, MRC)技术处理两个时隙收到的信息。其中Pe,AF(k)为中继采用AF协作发生的误码率,Pe,DF(k)为中继采用DF协作发生译码错误的概率。γsr(k)服从指数分布,γsr(k)≤Γ的概率为:

同理γsr(k)大于门限Γ的概率为:

基于IEEE802.11p的车载协作通信系统主要采用M-QAM调制[12],为简化分析,对于在AWGN信道上采用格雷编码和相干解调的M-QAM信号关于瞬时信噪比γ的条件误码率可近似表示为[18]:

式中,。当γsr(k)大于门限Γ时,此时系统传输的误码率可表示为:

式中,Pe,R(k)为中继节点仍译码错误的概率;Pe,prop(k)为差错传播的概率;Pe,coop(k)为中继节点译码正确,但在目的节点采用MRC合并支路信号时发生错误的概率。中继节点译码错误的概率可表示为:

式中,fγsr(k)(γ|γsr(k) >Γ)条件概率密度表示为[14]:
将式(19)和(22)代入式(21),计算可得:
当中继节点译码错误且将此错误信号发送至目的节点的概率为[12]:

另外当中继节点译码正确,但目的端合并源信号和中继转发信号时发生错误的概率为:

式中,式(25)进一步化简可得:
将式(23)、式(24)和式(26)代入式(20),可计算出当γsr(k)大于门限Γ时,中继节点采用DF协作转发第k个符号信息的误码率为:
当γsr(k)小于门限Γ时,中继节点采用AF协作方式,此时传输第k个符号的误码率为:

式中,其中γsrd(k)为中继链路的信噪比[10]:

高信噪比时利用均值调和函数,式(29)可简化为[12]:

所以高信噪比时(k)的条件概率密度为:

根据式(22),可得到γup(k)的概率密度函数[14]:

式中,,将式(32)代入(31)中,可得:
式中,,将式(33)和式(19)代入式(28),令,化简可得:

将式(27)、式(34)和式(17)代入式(16),可得HDAF中继协作方式下第k个符号的误码率表达式。对于含有N个码元符号的帧数据,HDAF协作方式下对应的ASER为:

以上推导可得,系统的ASER不仅与中继节点设置的信噪比门限Γ、不同节点之间的运动速度(多普勒频偏相关系数ρab)有关,而且取决于帧符号长度N即CSI估计精度。通过合理设置信噪比门限Γ,优化CSI估计精度可降低速度对误码率的影响,提高系统的误码性能,提升智能车载协作系统的可控性安全。
3 数值分析
本文分析基于AR1时变信道模型的智能车载HDAF协作系统的误码性能,考虑中继节点门限Γ、车辆相对运动引起的多普勒频偏及CSI估计精度对ASER的影响。本文根据IEEE802.11P车载通信标准协议[11],载波频率fc设置为5.9 GHz,采用4-QAM调制方式,码元符号周期Ts取48 us[15],信道增益变化的方差。假设S-D链路的归一化距离dsd= 1,S-R链路的距离dsr= 0 .7,R-D链路的距离drd= 0 .3,路径损失因子α为3。
根据以上参数,由式(7)计算可知,不同车辆相对移动速率导致的多普勒频偏及多普勒频偏相关系数对应关系如表1所示。由表1可知,AR1模型对应的多普勒频偏时变信道相关系数随节点相对速率的增大而减小。

表1 不同速率下对应的多普勒频偏相关系数
图2描绘了帧长度N=10即CSI估计精度为10%时,仅目的车辆节点以40 km/h移动,源和中继车辆节点保持静止,不同信噪比门限Γ对系统ASER的影响。从图中可以看出,随着中继信噪比门限Γ的增加,ASER相应地降低,当Γ继续增大时(10~15 dB范围内),误码曲线近乎重合。当Γ较小时,时变信道S-R链路的瞬时信噪比(signal noise ratio,SNR)质量较好,中继车辆节点更多的采用DF进行转发,通过增加门限值Γ,可降低差错传播发生的概率;当Γ继续增加时,S-R链路的瞬时SNR小于门限值Γ的概率增大,中继节点主要采用AF进行放大转发,所以继续增加门限Γ对改善系统的ASER效果不明显。
图3描绘了信噪比门限Γ为12 dB、CSI估计精度为5%时,仅目的节点车辆以不同速度移动时系统ASER随信噪比的变化曲线。由图可知,随着车辆移动速度的增大,ASER性能降低;在SNR较低时,增大SNR可以减少ASER,而当SNR继续增大时,ASER性能的改善程度不明显,ASER渐进趋于常数,具有误码平顶现象(即SNR继续增大,ASER性能保持不变)。所以当车辆节点存在高速移动,多普勒频偏较大时,仅通过提高系统的传输功率不能有效改善ASER的性能。
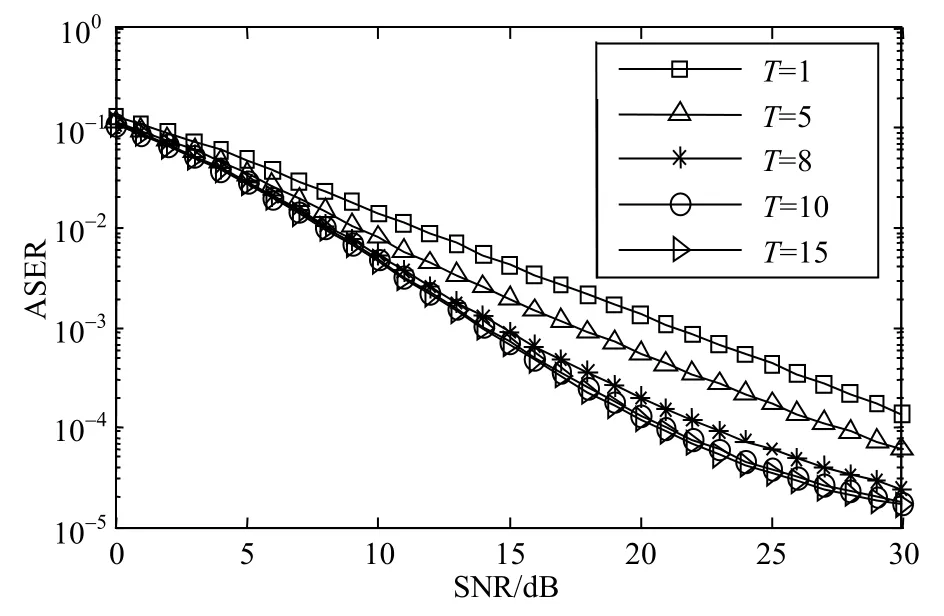
图2 不同信噪比门限下ASER随信噪比的变化
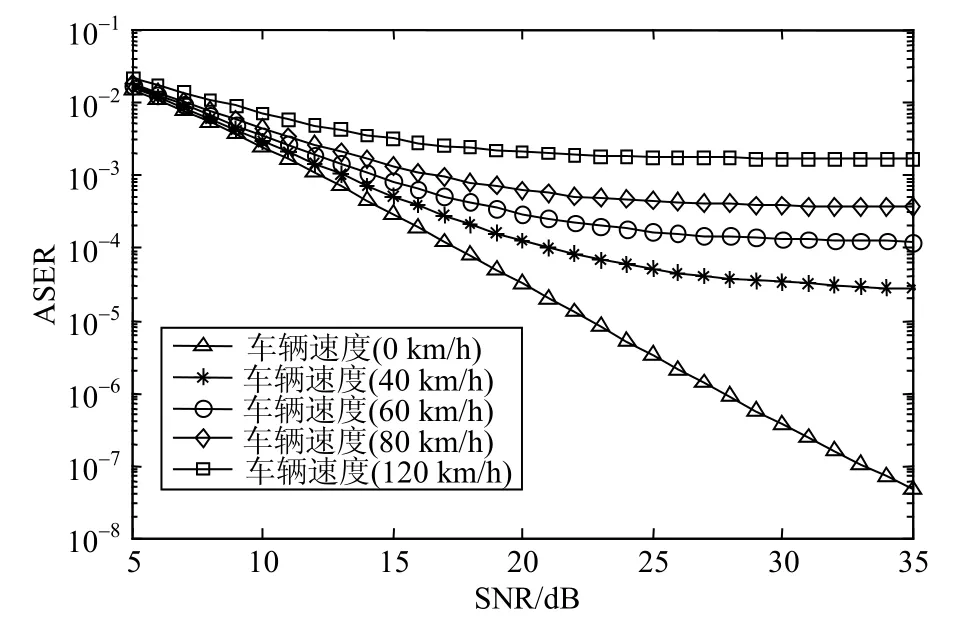
图3 不同车辆速度下ASER随信噪比的变化曲线
图4描绘了CSI估计精度为5%、速度为40 km/h时,单一车辆节点移动对系统ASER的影响。由图可知,相对于车辆节点静止状态,任何一个车辆节点的移动都增加了系统的ASER。同等条件下,相对于中继车辆节点和目的车辆节点的移动,源车辆节点的移动对ASER的影响较大,如当系统信噪比为30 dB时,源车辆节点相对于中继车辆节点和目的车辆节点的移动,ASER分别增加了13.9 dB和7.6 dB。
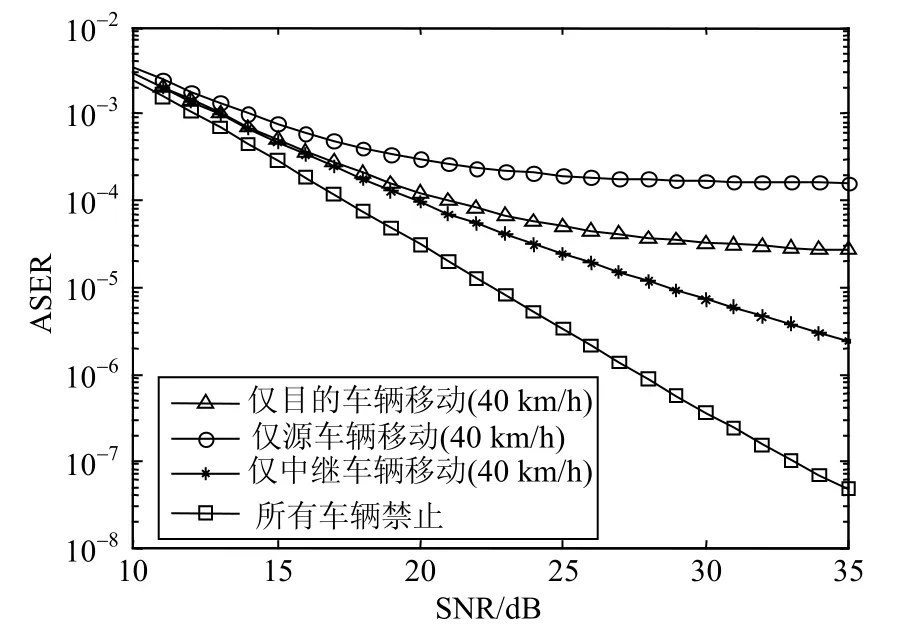
图4 不同车辆节点移动对ASER的影响
图5描绘了不同CSI估计精度对ASER的影响。由图可知,相同的移动速率不同的CSI估计精度时,目的节点车辆移动相对于中继车辆节点移动对ASER的影响较大。CSI估计精度提高,目的端捕获时变信道增益的能力增强,同等条件下系统的ASER减少且误码平顶值下降,当CSI估计精度提高到100%,即能完好估计CSI时,系统可完全消除误码平顶现象。
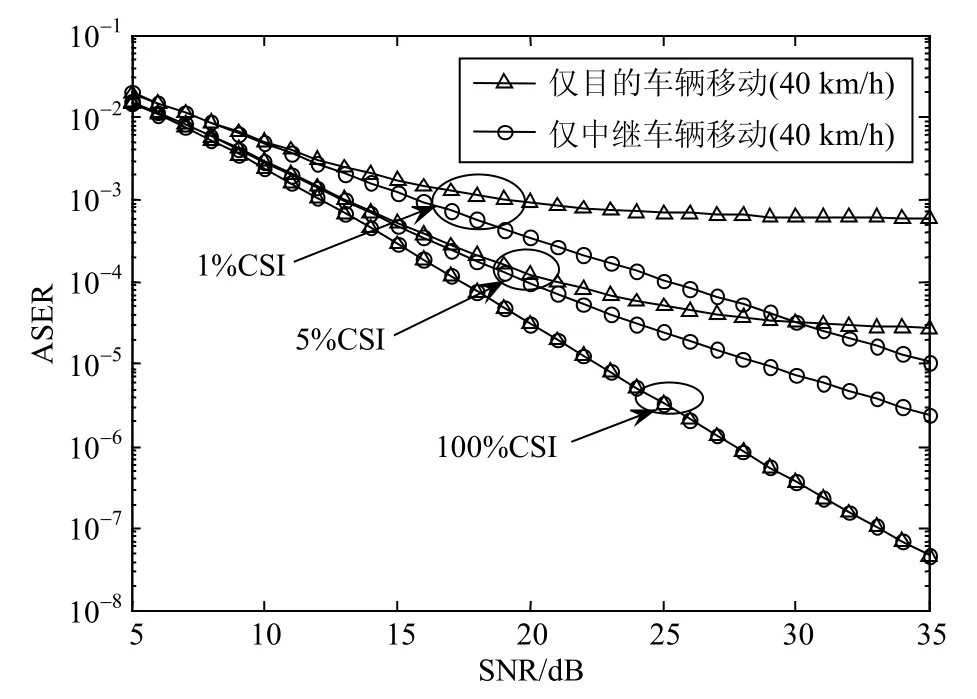
图5 不同CSI估计精度对ASER的影响
图6描绘了信噪比为30 dB,目的车辆节点移动使得系统具有误码平顶现象时,不同CSI估计精度下车辆相对移动导致的多普勒频偏对ASER的影响。横坐标为车辆速度在120 km/h范围内以20 km/h为间隔对应的多普勒频偏相关系数ρ。从图中可知,不完全CSI时,增大车辆运动速率,时变信道多普勒频偏相关系数ρ减少,接收端解码错误率相应地提高,误码平顶值增大。当车辆静止时,信道的多普勒频偏相关系数ρ为1,各链路为准静态瑞利衰落,瞬时信噪比与帧符号长度N无关,CSI估计精度对误码率无影响,ASER相同。车辆高速移动时通过增加CSI的估计精度可以降低高速移动引起的误码平顶值,改善系统的ASER性能。
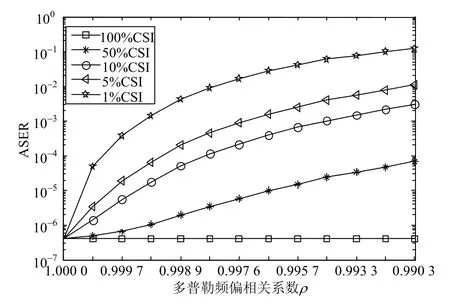
图6 不同CSI估计精度下ASER随多普勒频偏相关系数的变化
图7对比了中继节点采用AF、DF、HDAF 3种协作方式下,目的节点车辆高速移动产生的多普勒频偏相关系数对系统ASER的影响。从图中可以看出,同等条件下,HDAF中继协作方式下的系统ASER性能始终优于AF和DF中继协作方式。进一步可知,当CSI估计精度为5%[10],多普勒频偏相关系数ρ为0.998 9时,HDAF、DF与AF方式下平均误码率分别为2.90×10-3、4.10×10-3和6.7×10-3,HDAF相对AF和DF协作,系统的ASER性能分别提高了3.6 dB和1.5 dB,体现了HDAF协作方式能较好地自适应于车载协作时变通信系统。
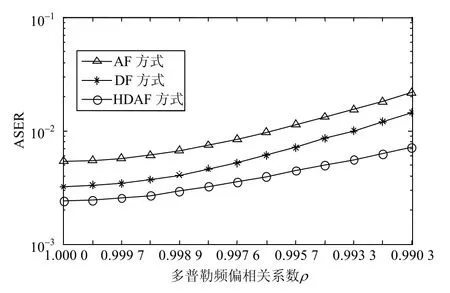
图7 不同中继协作方式对ASER的影响
4 结束语
本文采用AR1模型的多普勒频偏相关系数刻画时变信道特性,根据信道增益自适应选取HDAF协作通信方式,分析了中继节点信噪比门限、多普勒频偏相关系数与CSI估计精度对系统ASER的影响。数值分析结果表明,合理设置中继节点的信噪比门限可提高系统的ASER性能;车载运动速度的增加使得ASER具有平顶现象。进一步提高CSI估计精度,可有效减少高速引起的误码平顶值,提高系统ASER性能,为保障智能交通系统的可控性安全提供了良好的理论依据。
[1]XIAO H L, HU Y, YAN K, et al. Power allocation and relay selection for multi-source multi-relay cooperative vehicular networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(11): 3297-3305.
[2]SANG W K. Physical integrity check in cooperative relay communications[J]. IEEE Transactions on Wireless Communications, 2015, 14(11): 6401-6413.
[3]ZHU Y, SONG L X, WU S E, et al. Cooperative stepwise relaying and combining for multihop vehicular wireless communication[J]. IEEE Transactions on Vehicular Technology, 2015, 64(6): 2663-2671.
[4]SCHWARZ S, PHILOSOF T, RUPP M. Signal processing challenges in cellular-assisted vehicular communications:efforts and developments within 3GPP LTE and beyond[J].IEEE Signal Processing Magazine, 2017, 34(2): 47-59.
[5]ZHAN Y, TIAN F, SONG B. Social vehicle swarms: a novel perspective on socially aware vehicular communication architecture[J]. IEEE Wireless Communications, 2016, 23(4):82-89.
[6]邱斌, 金晓晴, 蒋为, 等. 时变信道下ADF协作车载通信误码率分析[J]. 电讯技术, 2017, 57(9): 1017-1022.QIU Bin, JIN Xiao-qing, JIANG Wei, et al. Symbol error rate analysis of adaptive decode-and-forward vehicular cooperative communication in time-varying channels[J].Telecommunication Engineering, 2017, 57(9): 1017-1022.
[7]廖丹, 孙罡, 杨晓玲, 等. 车载自组织网络单接口多信道的切换方法[J]. 电子科技大学学报, 2015, 44(2): 227-232.LIAO Dan, SUN Gang, YANG Xiao-ling, et al. Switching method of single radio multi-channels for vehicular Ad hoc network[J]. Journal of University of Electronic Science and Technology of China, 2015, 44(2): 227-232.
[8]MICHALOPOULOS D S, SURAWEERA H A, SCHOBER R, et al. Amplify-and-forward relay selection with outdated channel estimates[J]. IEEE Transactions on Communications, 2012, 60(5): 1278-1290.
[9]AVEDI M R, NGUYED H H. Performance of differential amplify-and-forward relaying in multimode wireless communications[J]. IEEE Transactions on Vehicular Technology, 2013, 62(8): 603-613.
[10]KHATTABI Y, MATALGAH M. Performance analysis of multiple relay AF cooperative systems over Rayleigh time-selective fading channels with imperfect channel estimation[J]. IEEE Transactions on Vehicular Technology,2016, 65(1): 427-434.
[11]GIANG A T, BUSSON A, LAMBERT A, et al. Spatial capacity of IEEE 802.11p-based VANET models simulations, and experimentations[J]. IEEE Transactions on Vehicular Technology, 2016, 65(8): 6454-6464.
[12]BAI Z Q, JIA J L, WANG C X, et al. Performance analysis of SNR-based incremental hybrid decode-amplify-forward cooperative relaying protocol[J]. IEEE Transactions on Wireless Communications, 2015, 63(6): 2094-2106.
[13]LI G Y, ZHAN Y G, KANG W. SER analysis and power allocation for hybrid cooperative transmission system[J].Systems Engineering and Electronics, 2012, 23(5):661-670.
[14]CHEN H, LIU J, ZHENG L. Performance analysis of SNR based hybrid decode-amplify-forward cooperative diversity networks over Rayleigh fading channels[C]//Proc of the IEEE Wireless Communications & Networking Conference.[S.l.]: IEEE, 2010, 29(16): 1-6.
[15]FETEIHA M F, UYSAL M. On the performance of MIMO cooperative transmission for broadband vehicular networks[J]. IEEE Transactions on Vehicular Technology,2015, 64(6): 2297-2305.
[16]IKKI S S, DHARRAB S A, UYSAL M. Error probability of DF relaying with pilot-assisted channel estimation over time varying fading channels[J]. IEEE Transactions on Vehicular Technology, 2012, 61(1): 393-397.
[17]ZHOU W X, WU J X, FAN P Z. High mobility wireless communications with Doppler diversity: Fundamental performance limits[J]. IEEE Transactions on Wireless Communications, 2015, 14(12): 6981-6992.
[18]TORABI M, FRIGOM J F, HACCOUM D. Performance analysis of adaptive M-ary quadrature amplitude modulation for amplify-and-forward opportunistic relaying under outdated channel state information[J]. IET Communications, 2013, 11(7): 1163-1175.
猜你喜欢
雷达与对抗(2022年1期)2022-03-31
铁道通信信号(2019年2期)2019-03-26
数据采集与处理(2018年6期)2018-12-19
电子制作(2018年11期)2018-08-04
电信科学(2016年9期)2016-06-15
航天器工程(2015年3期)2015-10-28
电子设计工程(2015年16期)2015-02-27
单片机与嵌入式系统应用(2014年7期)2014-03-24
铁路通信信号工程技术(2014年3期)2014-02-28
测绘科学与工程(2013年5期)2013-03-11