
微机械开放式射流陀螺设计和有限元分析*
2018-06-05 01:44朴林华胡永辉常兴远
传感器与微系统 2018年6期
朴林华, 朴 然, 胡永辉,常兴远
0 引 言
射流陀螺不需要振动部件,结构简单,具有能承受高过载、寿命长和成本低等优点[1~3]。Dau V T等人首先提出了一种利用微机电系统(micro-electro-mechanical system,MEMS)工艺制作基于单循环气流通道的微机械射流陀螺[4],后相继出现了不同结构的此类陀螺。目前,最具代表性的是Dinh T X等人提出的圆盘形多循环气流通道的三轴微机械射流陀螺[5~7]。
为了实现气流的定向并循环流动,在上述微机械射流陀螺中不仅压电陶瓷振子的驱动能力要强,而且气流通道结构较为复杂,因此,制作工艺复杂,成本高。为了解决上述射流陀螺存在的问题,本文提出了一种微机械开放式Z轴射流陀螺(Z轴射流陀螺是指其角速度敏感轴垂直于角速度芯片表面),采用开放式的射流通道[6],无需气流在敏感元件内循环,敏感元件结构简单;采用层状的角速度芯片结构,充分利用硅片的整体厚度,在相同角速度输入时射流敏感体惯性大,陀螺的灵敏度高。以往对射流陀螺的有限元数值模拟,如文献[4,8,9]等,都只建立流体分析模型,忽略了压电陶瓷振子的实体结构,将压电陶瓷振子的振动速度直接加载在流体边界,这种简化处理忽略了流体和固体之间的耦合,仿真条件与实际有差别,因此计算误差大。本文在给出微机械开放式Z轴射流陀螺结构原理的基础上,按照敏感元件的实际结构和尺寸建立三维模型,采用基于流固耦合的三维瞬态数值分析的方法计算敏感元件内气流场,更加真实地反映射流陀螺敏感元件的流体运动规律,证实了气流在入口和出口之间形成稳定的流动、射流敏感室内射流敏感体的存在以及角速度和热线r1和r2之间的速度梯度的关系,为利用哥氏效应制作微机械开放式Z轴射流陀螺奠定敏感基础;根据数值计算的结果,确定热线和喷口的间距、平行热线之间的间距,对射流陀螺进行了结构参数的优化。
1 结构原理
如图1所示,微机械开放气流式Z轴射流陀螺敏感元件主要由含一个压电陶瓷振子(压电陶瓷片粘接在薄铜片构成)的上盖、含气流通道的上硅板、表面有热电阻丝(以下简称热线)的下硅板和底盖等4层长方形平板粘接而成。
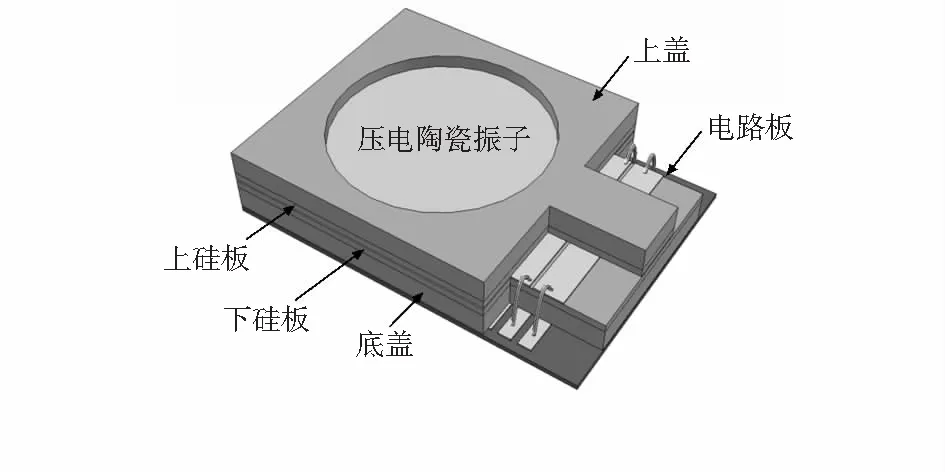
图1 微机械开放式Z轴射流陀螺外形
上盖和底盖采用聚甲基丙烯酸甲酯(polymethyl methacrylate,PMMA)材料。上盖、上硅板、下硅板和底盖粘接,合围形成气流通道,主要由压电陶瓷振子下面的圆柱形泵室、泵口、通道、排气室、集流室、喷口、射流敏感室和出口组成,其中喷口、排气室、集流室和喷口形成“十”字气流区域,如图2所示。热电阻丝由高温度系数的金属铂、氮化硅(Si3N4)和硅(Si)构成。压电陶瓷振子在交变电压的作用下沿着开放式Z轴角速度芯片厚度方向变形,由于集流室的横截面积大于泵口的横截面积但小于排气室的横截面积,这种特殊的结构在每一个压电陶瓷振动周期内气流通道内的流体阻力和流体动力会有不同,喷出量比吸收量大的多,使得气流通道内的气体从进口吸进和从出口放出,形成定向流动。气流由喷口射出,在射流敏感室内形成射流敏感体,如图2箭头所示。当在Z轴方向有角速度ωz输入时,由于哥氏力作用,从喷口喷出的射流敏感体将会发生偏转,从而在射流敏感室内的两相对平行的热电阻丝上引起相反的冷却作用。
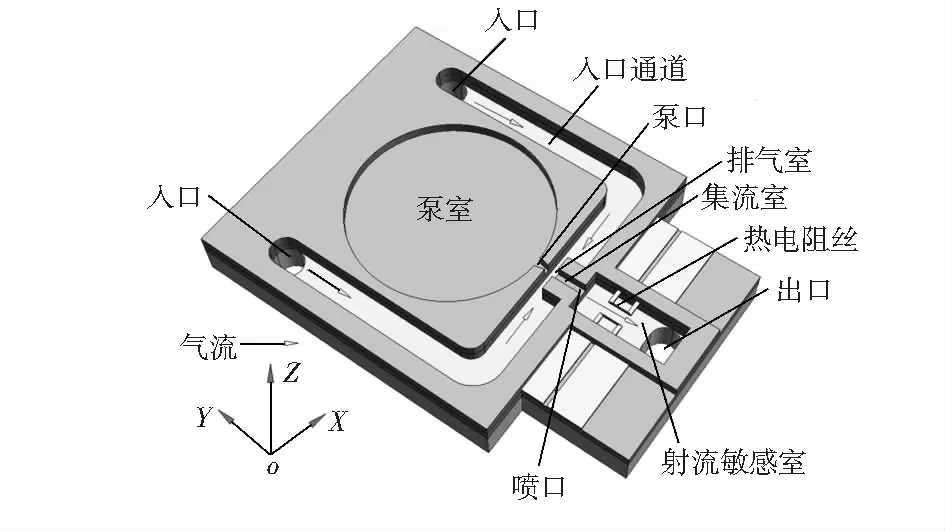
图2 陀螺结构原理
如图3所示,两热电阻丝r1和r2分别连接成惠斯通电桥的两个等臂,冷却使热电阻丝电阻值发生改变,阻值的改变通过惠斯通电桥转换为与角速度ωz成正比的电压E输出。
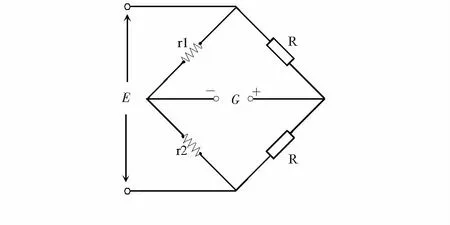
图3 检测电桥
根据图2给定的坐标系,当有沿着Z轴角速度ωz作用传感器时,气流束的偏移量为
(1)
式中LZ和VZ分别为喷口到两热线的距离、气流在LZ段的平均速度。
通过分析热线和层状射流之间的热传递现象,可以得到陀螺的灵敏度的性能。一根热线电阻值的变化和流速的关系如下
(2)
式中l为热线的长度;λ为气体的导热系数;α为热线电阻值温度系数;I为热线通电电流;r为未加角速度时热线的初始电阻值;Nu为努塞尔数(Nusselt number);V为气流从喷口流向热线的初始流速;n为0.2~0.33之间的经验常数;ΔV为热线上气流速度增量。
因为气流的偏移量很小,而且热线被设置在流速分布的线性区域,热线上气流速度增量ΔV和角速度ωZ引起的偏移量δωZ成比例,因此,其与实际角速度ωZ成比例,得到
(3)
式中Ki为常数,由热线r的流速分布的梯度决定。
将式(3)代入式(2)可得射流陀螺的输出电压为ΔU和输入角速度ωz之间的关系式
(4)
根据式(4)可以计算陀螺的灵敏度。
2 模拟仿真
流体的流动控制方程为
(5)
(6)
(7)

本文采用流固耦合分析的方法计算敏感元件内的流速分布,通过三维固体—三维流体实体建模,将开放式Z轴射流陀螺分成压电陶瓷振子和气流通道两部分,如图4所示。压电陶瓷振子由圆形压电陶瓷片和同心粘接的圆形薄铜片(Cu)弹性基板构成,将正弦交变电u(t)=u0sin2πf,直接加载在压电陶瓷振子上,u0为电压的峰值。采用载荷传递分析的方法,将耦合面选在弹性基板下表面,耦合面实现了固体部分和流体部分之间载荷相互传递。利用多物理场仿真软件comsol 5.1实现基于流固耦合的有限元数值法求解流体运动方程式(5)~式(7)。在求解过程中采用半隐式的压力—速度耦合的方法;对于动量、密度和能量的空间离散化,使用了二阶逆风方案。对于瞬态分析,时间步长采用压电薄膜振子振动周期的1/12。气流通道内气流是常温常压下的空气,进口和出口的气压均设定为标准大气压强,器件的边界条件设置为恒定温度300 K。对于流体防滑条件直接设置在除了压电陶瓷振子之外的其他部件上。

图4 敏感元件三维有限元模型
2.1 流动特性
根据计算结果,图5给出了气流通道内的流线图。从图5可以看出,气体在入口和出口之间形成了流动,在“十”字气流区域形成了速度较大区域,即产生了射流。

图5 气流通道内的流线
2.2 射流敏感体的产生
图6给出了压电陶瓷振子变形位移和流场的计算结果,可以看出,由于压电陶瓷振子的周期性振动引起了从入口到出口之间的流体流动。
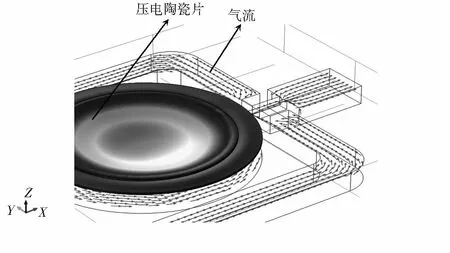
图6 敏感元件内耦合场(压电陶瓷振子振动—流体流动)
图7给出“十”字气流区域和射流室在压电陶瓷振子上、下半周期的流场矢量,可以看出,在外加交变电压作用下压电陶瓷振子周期性鼓形振动使泵室的体积发生扩张或缩小,因此,泵室的气体会出现交替排出和吸入。起始状态在泵室和排气室内充满气体。在压电陶瓷振子振动的一个上半周期,即下冲程时,当振子向泵体内(向右)弯曲,如图7(a),泵室内的气体被挤压,泵室内气体产生高压,从出气口排出,由于集流室的横截面积大于泵口的横截面积但小于排气室的横截面积,排出的气体大部分进入与排气室对应的集流室,并在喷口形成射流敏感体;在压电陶瓷振子振动的一个下半周期,即上冲程时,如图7(b),在当振子向泵体外(向左)弯曲时泵室内气体低压,气体被吸进,此时由于排气室横截面大于集流室,气体流动的阻力小,所以进入泵室的气体仍然主要来自排气室,同时由于气体的惯性,上一冲程引起的流向到流口的气流不会马上消失,继续在喷口形成射流敏感体。从图7可以看出:在压电陶瓷振子振动的一个完整周期内,射流敏感室内维持一个稳定的射流敏感体,为利用哥氏效应制作开放式Z轴射流陀螺奠定了敏感基础。

图7 压电陶瓷振子上下半周期的流场矢量
2.3 结构参数优化
有限元数值计算可以确定热线的最佳位置。射流陀螺检测角速度通过气流的偏移使热线的温度发生变化,这主要依靠流体速度在热线上的变化。流速的变化,依赖于速度场的梯度和流体偏移量的大小。为了获得高灵敏度,热线应该放在喷口的附近,因为此处流速很大,但是根据式(3)此处偏移量很小。另外,还要考虑如果热线距离喷口过远将对频率响应不明显。考虑到上述3个方面的情况,首先要确定热线和喷口距离以满足预期的响应频率。如果预期的响应频率为65 Hz,而微型热线的温度时间常数是微秒(μs)级,可以忽略不计,取低通滤波器的时间常数为0.6 ms,计算表明:在热线位置处的气流平均速度为0.5 m/s,热线和喷口距离可用式(8)[9]得到
(8)
式中 Δt为低通滤波器的时间常数;f为预期响应频率;LZ为热线和喷口距离;vZ为热线处气流的平均速度。经计算,LZ=1.8 mm。在外加角速度作用下,气流速度v在LZ=1.8 mm敏感平面的剖面分布如图7所示,其中X为LZ=1.8 mm处敏感平面内沿X轴与射流中心轴的距离。因为初始状态热线应该在气流速度线性范围的中心,这样射流陀螺的非线性度最小,从图7中可以看出,平行的热线之间的最佳距离为Δl=0.7 mm。
2.4 热线r1和r2之间速度梯度与角速度的关系
在外加角速度作用下,气流速度v在LZ=1.8 mm敏感平面的剖面分布如图8所示,其中X是此平面射流敏感体与射流中心轴的距离。根据图8可以计算热线r1和r2之间在不同角速度输入时的速度梯度βX。从图8可以看出,在静止条件下,热线r1和r2之间的速度梯度βX为零,随着角速度的输入,热线r1和r2之间的速度梯度βX不再为零,而随着角速度增加而加大。
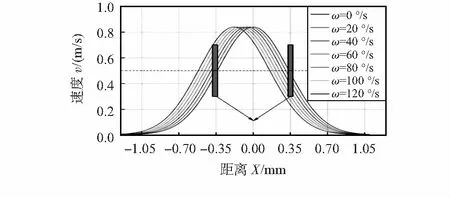
图8 在外加角速度下LZ=1.8 mm处敏感平面的气流分布
因此,根据式(4)可以得出,在其他材料和结果参数不变的情况下,电桥输出与输入角速度成正比的不平衡电压。根据式(4)可以得到理论灵敏度曲线和实际测试结果比较如图9,可以看出,±120°/s 内,射流陀螺理论灵敏度SFz=2.2 μV/((°)/s),实际测试灵敏度SFz=2.0 μV/((°)/s),两者的灵敏度相对误差在10 %左右,实际测试灵敏度要小,主要原因是理论计算忽略了辐射和传导的能量损失。

图9 陀螺输入—输出特性理论和实测对比曲线
图10给出本文提出的微机械开放式Z轴陀螺的样品。根据实验测试结果,最终测试结果为:在±120°/s的输入范围内,陀螺灵敏度为SFz=2.0 μV/((°)/s),非线性度优于0.5 %,功耗为5.2 mW,热线电阻值R=3 Ω,热线电阻温度系数TCR=2 600/℃。
图10 开放式微机械Z轴射流陀螺外形
3 结 论
采用基于流固耦合的三维瞬态数值分析方法计算了微机械开放式Z轴射流陀螺敏感元件内气流的运动规律,证实了气流在入口和出口之间形成稳定的流动、射流敏感室
内射流敏感体的存在以及角速度和热线r1和r2之间的速度梯度的关系,并根据数值计算的结果,确定了热线和喷口的间距、平行热线之间的间距,为微机械开放式Z轴射流陀螺优化设计开辟了有效的研究途径。
参考文献:
[1] Van Thanh Dau,Thien Xuan Dinh,Tung Thanh Bui.Jet flow generation in a circulatory miniaturized system[J].Sensors & Actuators B:Chemical,2015,223:820-826.
[2] Phan Thanh Hoa,Thien Xuan Dinh,Van Thanh Dau.Development of a jet-generator and its application to angular rate sensor[C]∥Semiconductor Technology International Conference (CSTIC),Hangzhou China,2015:386-388.
[3] Dau V T,Otake T,Dinh T X,et al.Design and fabrication of convective inertial sensor consisting of 3DOF gyroscope and 2DOF accelerometer[C]∥Transducers 2009,Denver,CO,USA,2009:1170-1173.
[4] Dzung Viet Dao,Van Thanh Dau,Thien Xuan Dinh.A fully integrated MEMS-based convective 3-DOF gyroscope[C]∥The 14th International Conference on Solid-State Sensors,Actuators and Microsystems,Lyon,France,2007:1211-1214.
[5] Van Thanh Dau,Thien Xuan Dinh,Tung Thanh Bui.Jet flow generation in a circulatory miniaturized system[J].Sensors & Actuators B:Chemical,2015,223:820-826.
[6] Thien X Dinh,Yoshifumi Ogami.A triple-axis fluidic angular rate sensor[C]∥The 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics,Kaohsiung,Taiwan,2012:748-752.
[7] Thien Xuan Dinh,Yoshifumi Ogami.Design of a triple-axis MEMS-based fluidic gyroscope[C]∥2012 IEEE Sensors Conference,2012:721-726.
[8] Tatsuo Shiozawa,Van Thanh Dau,Dzung Viet Dao.A dual axis thermal convective silicon gyroscope[C]∥ 2005 IEEE Sensors Conference:1-6.
[9] Phan Thanh Hoa,Thien Xuan Dinh,Van Thanh Dau.Development of a jet-generator and its application to angular rate sensor[C]∥Semiconductor Technology International Conference (CSTIC),Hangzhou,China,2015:386-388.
猜你喜欢
排灌机械工程学报(2022年6期)2022-06-23
航空维修与工程(2022年12期)2022-02-04
油气·石油与天然气科学(2021年10期)2021-11-20
计算机仿真(2021年9期)2021-11-17
科学与信息化(2020年23期)2020-09-06
物理教学探讨(2018年7期)2018-10-29
疯狂英语·新读写(2017年7期)2017-08-08
制造技术与机床(2017年12期)2017-02-02
电测与仪表(2016年18期)2016-04-11
物理实验(2015年10期)2015-02-28
