
基于任务调度的双边控制机器人书法系统设计*
2018-06-05 01:44张兴宇刘满禄
传感器与微系统 2018年6期
张兴宇, 刘满禄,2, 张 华, 徐 亮, 王 姮, 张 静,2
0 引 言
由于毛笔书法在创作过程中存在多样性,使得通过双边控制系统在从端实现毛笔书法存在较大的难度。当前对这方面的研究大多停留在虚拟绘制阶段,运用力反馈设备书写,在虚拟端完成虚拟文字的绘制。虚拟绘制的研究基本都是在获得笔道的基础上展开的,Strassmann S通过控制点调整来确定笔道路径,并通过压力来确定笔道宽度[1]; Wu J等人采用层次结构的方式生成文字轨迹[2];郭超等人则运用力反馈技术提出了一种新的毛笔建模方法,将其简化成弹簧振子模型进行虚拟绘制分析[3~5]。以上方法均只在虚拟端建模绘制,并未实现真实的毛笔书写,缺乏真实感。胡旭东等人利用直角坐标机器人完成了本地控制下的书法临摹,但直角坐标机器人运动方式单一,不能很好展现毛笔书法[6];毕寻采用遥操作主从异构方式研究软笔书写,但缺乏从端力反馈以及对书写结果的监测[7]。
基于此,本文提出了基于力反馈双边控制结构的毛笔书写系统。主从两端均采用Geomagic Touch力觉交互设备作为控制对象,具有6个自由度,灵活性好,满足毛笔书写要求,并且能够实现主从力反馈。系统双边控制模型由上位机MATLAB函数模块搭建,采用快速任务调度的模块化联合控制策略来实现对从端力觉交互设备各关节的独立控制,提高系统效率。书写平台搭载压力传感器,实时采集主从端书写过程笔头与平台压力,并记录数据,对书写过程进行监测校正。
1 力反馈双边控制系统
1.1 双边控制模型
力反馈双边控制结构如图1所示,包括5个子系统:操作者、主手、通信环节、从手和环境[8,9]。操作者操作主手运动,并将主端速度信号通过通信模块传递到从端,从手跟随主端速度信号运动,并将在环境中感受到的力通过通信环节反馈到主手并作用于操作者。

图1 力反馈双边控制结构示意
一般认为,主、从末端均为质量与阻尼模型。主手和从手的动力学模型[10,11]为
Mmm(t)+BmVm(t)=Fh(t)-Fm(t)
(1)
Mss(t)+BsVs(t)=Fs(t)-Fe(t)
(2)
式中Fh为操作者施加的力;Fe为从手和环境的作用力;Fs为从手控制器对应的力;Fm为从端的反馈力;Vm为主手的速度量;Vs为从手的速度量;Ms为从手等效惯量系数;Bm为主手速度阻尼系数;Bs为从手速度阻尼系数。
在对从手进行稳定控制理想情况下,从手速度Vs=Vm,从端的反馈力Fm=Fe。
1.2 控制方法
系统的控制方法采用一种快速任务调度的方法,主要由控制系统与任务调度、机械臂的应用程序编程接口(application programming interface,API)和机械臂位姿解算3部分构成。当给定控制信号,控制器根据位姿结算信息进行不同优先级的任务调度分配,任务调度模块通过调用机械臂的API实现对机械臂的控制。同时,位姿解算模块实时获取机械臂位姿信息反馈回控制器,确保任务调度的快速稳定进行。
系统选取多通道控制结构,实验主要运用Geomagic Touch前3个关节,如图2所示,选取3个通道,每个通道具有独立的控制器控制对应的关节。采用多回路反馈的方式形成多个控制回环,且每个控制器的参数均可独立设置。任务调度控制器根据优先级进行任务调度,完成控制任务。

图2 控制结构
通过手持主手机械臂在书写平台上写字,主手分别将关节信息通过通信模块传递给从手各关节对应控制器,任务调度控制器根据位姿结算信息来进行不同优先级的任务调度分配,并通过API实现对每个关节的控制。最后通过姿态解算完成对3个关节的反馈控制,实现从手对主手的快速稳定跟踪,完成毛笔书法。
2 力觉交互设备建模
Geomagic Touch是一个具有六自由度的力觉、触觉设备[12],其中,3个自由度具有力反馈、角度传感器,3个自由度只具有角度传感器。作为控制对象,本文仅使用前3个关节,只对相应关节进行建模[13],如图3所示。

图3 Geomagic Touch力觉交互设备
关节角设为θ1,θ2,θ3,θ4,其中θ4固定为恒定角度,连杆长度依次设为L1,L2,L3,则D-H参数相邻坐标变换为
(3)
根据式(3)可得各个关节变换矩阵,将各个相邻变换矩阵相乘即可得到末端点相对于基座的齐次变换矩阵
(4)
设末端齐次变换矩阵为
(5)
由式(5)得末端位置坐标(px,py,pz),则由位置关系求导所得速度表达式满足
(6)
由式(6)即可求出速度雅克比矩阵,建立末端姿态与各关节角速度的对应关系,姿态解算则利用MATLAB软件下机器人工具箱完成[14]。
3 实验与结果分析
实验平台由2台Geomagic Touch力觉交互设备[15,16]、2套搭载压力传感器的书写平台、2支毛笔以及上位机组成,如图4所示。实验中仅使用具有力觉反馈的前3个关节作为控制对象。上位机使用PHANSIM TOOLKIT MATLAB函数模块进行实验[17]。系统的快速任务调度函数由C++语言编写并封装,经由MATLAB的C编译器编译后调用。使用 PHANToM Teleoperation Block函数块,可以将主从Geomagic Touch力觉交互设备的关节角数据实时采集到MATLAB仿真平台中,并存储。书写平台通过压力传感器实时采集书写过程中的压力,并通过串口将数据发送至上位机。

图4 写字平台实物
实验时,启动各个模块,相关的通信配置之后,通过手持主手用毛笔书写“大”字,从端也成功完成“大”字的书写,主从书写结果如图5所示。3个控制关节的关节角跟随情况如图6所示,书写过程中主从毛笔对书写平台的压力如图7所示。
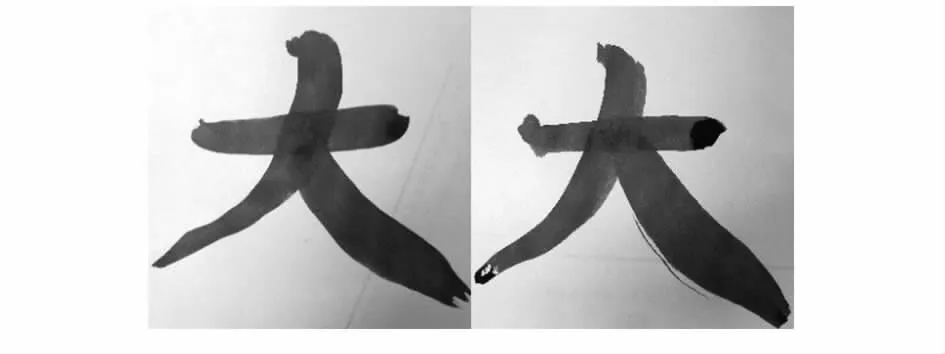
图5 主从端“大”字书写结果

图6 主从端关节角变化

图7 主从端书写平台压力
由图5可以看出,主从结果无论在字的大小轮廓还是结构上都基本一致,达到了力反馈双边控制毛笔书法实现的效果;图6中主从3个关节角变化曲线在整个书写过程中均能达到很好地跟随性,未发生跟踪不足问题,并且由于采用快速任务调度的控制方案,在跟随的时间上也不存在时延滞后,表明系统稳定性良好;由图7 可以看出:“大”字的第一画用时约3.4 s,下笔压力先上升后下降并保持平稳完成,抬笔1 s。第二画用时约2.3 s,写字用力由重缓慢变轻,抬笔1.5 s。第三画用时约3.3 s,压力由小逐渐变大,又缓慢变小,完成书写。书写过程中主从端毛笔对于书写平台的压力总体上一致,并且有很好的跟随性,压力变化趋势也符合毛笔写字规律。实验中主从压力的误差可能由毛笔固定的姿态、笔头蘸墨量等原因引起。
4 结束语
本文主要设计了一种基于双边控制结构的毛笔书法系统,并设计了快速任务调度的控方法。解决了目前毛笔书法主要停留在虚拟绘制阶段,缺乏真实感,传统控制方案中实时性不强等问题。实验结果表明该毛笔书法系统设计是可行的,为同类力反馈双边控制系统的设计提供了参考。
参考文献:
[1] Strassmann S.Hairy brushes[J].ACM Siggraph Computer Graphics,1986,20(4):225-232.
[2] Wu J,Wang D,Zhang Y.Virtual fixture based haptic rendering of handwriting[C]∥IEEE International Conference on Virtual Environments,Human-Computer Interfaces and Measurement Systems,HongKong,China, 2009:16-21.
[3] 郭 超,侯增选,杨广卿,等.采用力反馈技术的毛笔建模[J].浙江大学学报:工学版,2017,51(9):1735-1744.
[4] 郭 超,侯增选,杨广卿,等.力反馈技术水墨扩散仿真[J].浙江大学学报:工学版,2016,50(9):1695-1702.
[5] 杨广卿,侯增选,郭 超,等.力反馈技术在虚拟绘制中的实现与应用[J].机床与液压,2016,44(4):94-96.
[6] 胡旭东,陈 鹰.基于Web的气动书法机械手遥临摹[J].中国机械工程,2004,15(16):1465-1468.
[7] 毕 寻.力觉临场感技术及其在机器人书法中的应用研究[D].北京:中国科学院研究生院,2012.
[8] 徐 亮,刘满禄,张 华,等.基于核应急机械手的主从双边控制系统研究[J].自动化仪表,2017(8):1-4.
[9] Anderson R J,Spong M W.Bilateral control of teleoperators with time delay[J].IEEE Transactions on Automatic Control,1989,34(5):494-501.
[10] Lee D,Spong M W.Passive bilateral control of teleoperators under constant time delay[J].IFAC Proceedings Volumes,2005,38(1):109-114.
[11] 黄攀峰,刘正雄.空间遥操作技术[M].北京:国防工业出版社,2015.
[12] 邱 恒,刘满禄,张 华.基于模糊PD算法的三自由度机械臂遥操作双边控制[J].自动化与仪表,2016,31(9):11-16.
[13] 康杨雨轩,郑 文,李松林,等.基于Leap Motion的机械臂交互控制研究[J].传感器与微系统,2016,35(6):34-37.
[14] 王春荣,夏尔冬.基于MATLAB的六自由度机械臂运动仿真分析[J].榆林学院学报,2017,1(2):11-14.
[15] 高洪涛,杜 娟,肖 楠,等.导管操作系统中力觉传感器信息的获取与控制研究[J].传感器与微系统,2012,31(1):82-84.
[16] Nisky H M H,Okam A M.Uncontrolled manifold analysis of arm joint angle variability during robotic teleoperation and freehand movement of surgeons and novices[J].IEEE Transactions on Biomedical Engineering,2014,61 (12): 2869-2881.
[17] Mohammadi A,Tacakoli M,Jazayeri A,PHANTSIM:A Simulink toolkit for the sensable PHANToM haptic devices[C]∥Procee-dings of the 23rd CANCAM,Canada,2011:787-790.
猜你喜欢
重型机械(2019年3期)2019-08-27
制造技术与机床(2019年4期)2019-04-04
测控技术(2018年5期)2018-12-09
测控技术(2018年7期)2018-12-09
电子制作(2018年9期)2018-08-04
制造技术与机床(2017年6期)2018-01-19
浙江大学学报(工学版)(2016年9期)2016-06-05
电测与仪表(2016年24期)2016-04-12
信息通信技术(2015年6期)2015-12-26
探测与控制学报(2015年4期)2015-12-15
