
便携式爆炸物快速侦察标记机器人设计研究
2018-06-04 12:02:49李兆路翟佳星徐培培桂佳清陈威震
机械工程与自动化 2018年3期
李兆路,翟佳星,徐培培,桂佳清,陈威震,刘 旭
(长安大学 工程机械学院, 陕西 西安 710064)
0 引言
自20世纪60年代以来,随着机器人技术的发展及世界安全形势的变化,各国先后研发装备了爆炸物侦察处理机器人,用以代替人类从事可能对人员生命健康构成威胁的工作, 如军事上处理可疑爆炸物、石化工业中处理化学危险品等[1]。目前具有代表性的这类机器人包括英国研发并出口50多个国家的“手推车”排爆机器人,装备驻阿富汗美军的由美国Remotec公司研制的Andros系列机器人,沈阳自动化所研发的“灵蜥”系列机器人,由金吾科技公司研发并装备新疆公安系统的“JW”系列机器人[2]。上述爆炸物侦察处理机器人性能较为先进,同时具备侦察标记处理爆炸物危险品的功能,其中有的机器人已经经过沙场的检验[3]。然而为满足拆除、处理危险品而采用的较为复杂的结构设计,同时也意味着较高的造价、较大的重量及体积,这就给大规模装备受爆炸物威胁的一线基层人员带来巨大的预算压力。考虑到实际应用中基层人员装备的广泛性对于装备便携性及其成本较为敏感,本文旨在运用模块化设计思想设计一款轻量化、低成本同时具有较强机动性的通用便携式爆炸物快速标记处理机器人,以便于实现装备的广泛实际应用,同时可用于火场侦察反恐、核设施的检查与维修等[4]。
1 机器人功能分析及结构设计
为了降低成本,通过替换不同功能模块快速实现不同任务能力的柔性重构组合[5]。根据机器人所需执行功能,将本产品划分为底盘模块、驱动模块、云台、机械臂模块。
1.1 底盘模块结构设计
作为便携式爆炸物快速侦察标记机器人的移动载体,其底盘应在低能耗的前提下具有一定的移动速度和良好的姿态稳定性,具有较大刚度,保证机器人上部机械臂的工作稳定性,以避免机械臂运动过程中产生较大的摆动;为适应各种地理环境, 应具有一定的爬坡和越障能力[6]。目前机器人底盘结构主要有轮式、履带式、轮履结合式。轮式结构具有结构简单、重量轻、轮式滚动摩擦阻力小、机械效率高等特点,尽管履带式结构可以拥有更好的越野、越障能力,但是履带式机器人的缺点是重量大、 能耗大[7],考虑到恐怖袭击经常发生的环境地点,结合美军在阿富汗、伊拉克遇到爆炸物威胁的实际经验来看[8],路边为暴恐分子安置爆炸物的常见地点,因此底盘结构采用具有较大悬挂行程的轮式结构即可满足使用的需要同时保证便携性,底盘动力部分采用直流电动机驱动,搭配大容量的电池。底盘采用铝合金,以保证较高的刚度及重量的合理分配。
1.1.1 分动箱的设计
分动箱是实现发动机的动力合理分配的一种装置,将发动机的动力输出到后轴或同时输出到前后轴。分动箱处的直齿轮组是由齿数比为20∶30∶48的三个直齿圆柱齿轮组成,模数为0.5 mm,节径分别为10 mm、15 mm、24 mm。该分动箱的作用是将电机的运动分别传送到前桥和后桥上,使该机器人可以实现四轮驱动,从而提高机器人的越野能力。分动箱如图1所示。为改变从传动轴处传递的运动方向,选用了一对锥齿轮,这对锥齿轮同时还肩负着改变传动比的作用。
1.1.2 转向驱动桥的设计
尽管汽车底盘差速器能够使不同驱动轮以不同转速作纯滚动运动,但是考虑到常规差速器结构的复杂性和其尺寸和质量较大,故本设计采用的方案是既不要差速器也不要差速锁,而是用一根刚性轴贯通左右。虽然这种结构在转弯时会有轮胎打滑,但考虑到整机尺寸和质量,这种打滑可以忽略不计。在保证底盘机动性能的同时满足了经济性、可靠性要求。转向驱动桥和驱动桥末端分别如图2和图3所示。
转向拉杆是转向机构的重要组成部分,直接影响着车辆的稳定性、安全性和使用寿命。转向拉杆分为转向直拉杆和转向横拉杆,转向直拉杆将导向摇臂运动传递给转向节臂。该机器人采用了转向拉杆的结构,但与一般汽车不同的是,它采用了前后桥都有转向功能的结构,这也就意味着4个轮子都具有转向能力,这种结构有利于更好地转向。四轮转向总体结构如图4所示,转向拉杆结构如图5所示。

图1 分动箱 图2 转向驱动桥结构 图3 转向驱动桥末端结构

图4 四轮转向总体结构
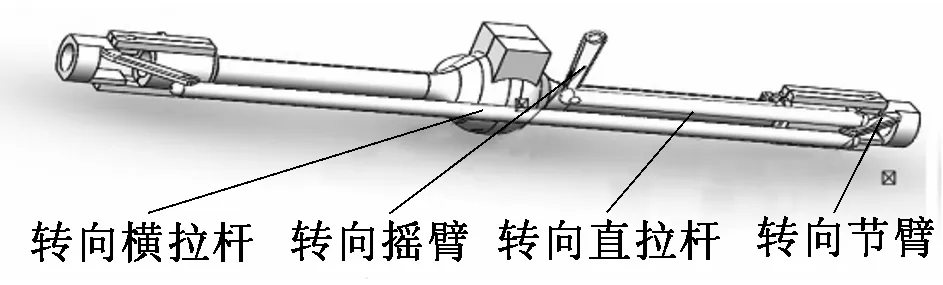
图5 转向拉杆结构
1.1.3 减震机构的设计
减震机构采用的是弹簧阻尼减震器。弹簧能够缓冲绝大部分冲击,而阻尼器则能够极大地减弱弹簧的震动,两者结合起来能够保证底盘的越野能力并且使上部设备在崎岖的路面上保持相对的稳定。图6为减震器的结构示意图。
1.2 驱动模块的分析设计
参考类似尺寸质量的轮式行走装置,根据预计的整机质量对功率进行预选,决定选用有刷直流545电机,转速为7 000 r/min。整机的减速机构分为三个部分:电机处的减速齿轮、分动箱处的减速齿轮和车桥处的减速齿轮。电机处的减速采用一对直齿轮,模数为0.5 mm,传动比为1∶9,齿数分别为10和90,该对齿轮的啮合示意图如图7所示。

图6 减震器的结构示意图 图7 减速机构齿轮
1.3 云台、机械手模块的分析设计
排爆侦察机器人上经常使用彩色COD摄像机对周边情况进行观察 ,使用多自由度机械手[9]对爆炸物进行处理,有的机器人装备了霰弹枪,用以引爆销毁爆炸物。 为了实现不同任务能力的快速转换,本设计采用了通用型云台,可以根据实际需要选择配备不同装备,如图8所示的是用以处理爆炸物的6自由度机械手及标记爆炸物的喷漆罐。
2 装配制造及虚拟仿真
为了提高设计的运动性能与可靠性,利用SolidWorks对本产品建立了三维模型,如图9所示[10]。在装配过程中应保证装配精度即最大程度地保证产品装配后的实际几何参数、性能参数和理想的几何参数的重合度。最后利用ADAMS进行了仿真,仿真结果验证了底盘及云台机械手系统运动的稳定性,其中摆臂的加速度仿真曲线如图10所示。

图8 机械手及标记爆炸物的喷漆罐

图9 整机轴测图

图10 摆臂的加速度仿真曲线
3 结论与展望
本文针对目前爆炸物侦察处理设备结构复杂、难以携带、成本高昂的不足,设计了一种低成本轻量化通用的爆炸物快速侦察标记机器人,该设备重量轻、机动灵活性好,可以弥补现有排雷机器人在诸如爆炸物标记、火场侦察任务中灵活性不足的缺点。本文首先根据爆炸物处理任务的工作环境设计了与之相适应的机器人底盘结构,包括减速减震及转向传动机构,之后设计了与之匹配的云台及机械臂机构,最后为保证可靠性,通过SolidWorks及ADAMS对本产品进行建模及仿真。本文从实际工作需求和经济负担角度提出了轻量化的便携式爆炸物快速侦察标记机器人,它具有的轻便灵活、经济性好的特点有利于实现广泛地装备一线人员和更好地服务于无力购买大型爆炸物处理设备的不发达地区,而这些地区恰恰是深受爆炸物困扰的地区。
参考文献:
[1] 张伟,刁战颖.国外机器人技术最新发展概览[J].中国安防,2016(6):97-103.
[2] 范路桥,姚锡凡,祁亨年,等.排爆机器人的研究现状及其关键技术[J].机床与液压,2008(6):139-143.
[3] Reichard K,Simpson T,Rogan C,et al.Design and development of a family of explosive ordnance disposal (EOD) robots[G]//Proceedings of SPIE-The International Society for Optical Engineering.[s.l.]:[s.n.],2008,7112.
[4] 陈晓东.警用与反恐机器人的现状与趋势[J].机器人技术与应用,2015(6):31-33.
[5] 舒畅,熊蓉,傅周东.基于模块化设计方法的服务机器人结构设计[J].机电工程,2010(2):1-4.
[6] 陈骏.移动机器人通用底盘设计与研究[D].杭州:杭州电子科技大学,2012:4-6.
[7] 欧屹.特种地面移动机器人机械系统设计与分析[D].南京:南京理工大学,2013:3-6.
[8] 罗晨.美国空军使用的排爆机器人[J].军事文摘,2015(15):2.
[9] 明添,钱瑞明.排爆机器人五自由度操作臂动力学分析[J].机械设计与制造工程,2014(9):13-17.
[10] 田娟.基于虚拟样机技术的移动机器人越障性能研究[D].包头:内蒙古科技大学,2012:4-7.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:38
中国检察官(2022年20期)2022-12-29 08:47:02
中国检察官·经典案例(2022年10期)2022-05-30 06:40:53
锻压装备与制造技术(2021年3期)2021-08-13 08:39:54
环球时报(2018-08-21)2018-08-21 04:16:33
铁道机车车辆(2016年3期)2016-10-25 09:02:43
学习月刊(2016年19期)2016-07-11 01:59:38
专用汽车(2016年4期)2016-03-01 04:14:20
汽车维修与保养(2015年6期)2015-04-17 03:31:48
汽车维护与修理(2015年5期)2015-02-28 12:16:40
