基于激光传感数据的拥堵路口交通信号灯控制
2018-06-01 10:50:55杨乐,周平
计算机工程与应用 2018年11期
杨 乐,周 平
YANG Le1,ZHOU Ping2
1.长安大学 建筑学院,西安 710061
2.长安大学 信息工程学院,西安 710064
1.School ofArchitecture,Chang’an University,Xi’an 710061,China
2.School of Information Engineering,Chang ’an University,Xi’an 710064,China
1 引言
汽车工业近些年发展十分迅猛,汽车的制造成本和价格也呈现出逐年下降的趋势,小轿车开始进入普通家庭。随着汽车保有量的不断攀升,城市道路交通的拥堵状况愈发严重[1]。城市交通拥堵不仅降低效率、污染环境,长期的交通堵塞还会造成巨大的经济损失[2]。缓解城市的拥堵问题仅依靠城市改造和扩建道路无法彻底解决日趋严重的道路拥堵问题。目前需要进行的是在现有的交通基础设施条件下,采用实用、高效的交通信号控制方法来缓解和改善道路拥堵的现状[3-4]。要改善整个城市的道路状况,须对整个城市的交通网络进行协调控制和全面优化,应用高亮度激光交通可变情报板技术合理地分配各个路口的信号灯时间,减少车辆的启停次数,消除道路拥堵的瓶颈点[5]。
鉴于激光的单色性、高亮度、高相干性及方向性好等优点,激光技术被广泛地应用于传感领域[6-7]。混沌光纤激光传感技术是近年来逐渐兴起的一种测量控制传感网络技术,它将激光技术、传感技术、微电子技术、无线通信技术等有效地融合为一体[8-9]。基于扫描激光传感技术采集数据,提取实时的路况信息,并将这些传感数据应用于交通灯的控制,相比于其他方法采集数据,具有响应速度快、识别精度高的优势[10]。目前国内外的一些专家和学者对城市单路口交通信号控制研究较多,文献[11]和文献[12]提出了单路口交通信号控制方法。但整个城市作为一个整体,单一路口道路运行的质量与干线上其他路口紧密相关,这些控制方法难以有效提高整个交通网络的通行能力。
为了缓解日益严重的城市交通拥堵问题,本文提出了一种基于激光传感数据的交通信号灯智能控制方法研究。首先在拥堵路段有序布置激光传感器节点,距离基站较近处,激光传感器节点布置较少,而距离基站较远处,因激光传感器通信距离有限,必须通过中间节点的转发,耗能较多,所以布置较多的激光传感器节点,用于实时采集十字路口的车流量信息,构建一种控制级与协调级相结合的两层级信号控制模型。引入模糊控制算法,基于提取的交通路口实时激光传感数据,求解出适用于拥堵路段交通信号控制模糊子集,及当前车流长度、车辆滞留时间、延误时长等变量。仿真实验证明,提出的智能控制方法可以有效缓解交通拥堵的状况,减少了车辆滞留时间,提高了控制效果。
2 基于激光传感数据的拥堵路口交通信号灯控制方法研究
2.1 两层级交通信号灯控制模型的构建
在多路口交通信号灯控制系统中,路口等待通过的车辆为状态向量,交通信号灯的相位差、闪烁周期及绿信比为控制向量。在交通信号灯的四个方向灯上均匀地部署激光传感节点,路口的交通信号为控制节点,形成一个局部的激光传感网络,如图1所示。
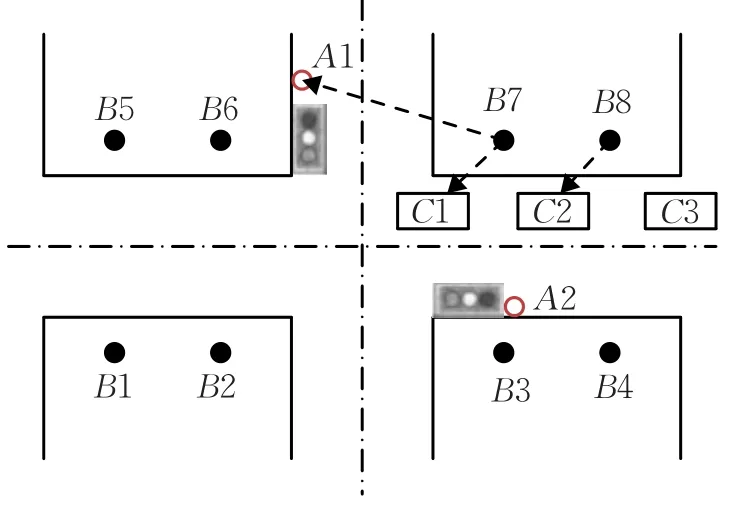
图1 交通信号灯控制模型图
图1中A1和A2为DBR光纤激光传感器的交通信号激光传感网络的控制节点,B1~B8为激光传感节点,C1~C3为排队等候的车辆。这些分布的激光传感器节点与控制节点以自组织的方式成簇,其中部署于道路两侧的激光传感节点和等候的车辆为簇内成员节点,控制节点为簇首节点[13]。激光传感节点采用路况实时信息,通过激光传感网络与控制簇首节点进行数据通信,而簇首节点负责汇总本簇内激光传感节点捕获的实时路况信息,并与邻近的控制节点进行通信交互[14-15]。对交通信号灯的控制要全盘考虑,除需考虑交通信号灯本身的相位、闪烁周期及绿信比外,还要考虑本簇内各激光传感节点捕获的数据信息,综合多个路况的综合道路情况。本文采用了两层级激光传感网络组织结构,如图2所示。
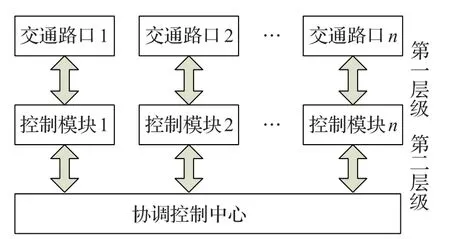
图2 两层级交通信号控制流程
第一个层级为控制级,基于采集到的可饱和吸收稳频技术的激光传感数据来调整各十字路口的绿信比。第二个层级是协调级,负责总体的协调和控制,包括适时调整各路口之间的相位差及各主干线路的信号灯周期[16]。
2.2 基于激光传感数据的交通信号模糊控制方法
交通信号灯路口车道停车线的上游均安装了激光传感节点,检测进入车道的车辆信息并将实时路况情况上传至控制节点[17],设通行到交通信号路口的车辆相位编号集合为W={1,2,…,n},行车道编号集合为V={1,2,…,m} ,则在t时刻末停留在i相位、j车道的车辆排队长度可以表示为hij(t),平均滞留时间表示为cij(t),车辆在该车道上的延误时间表示为gij(t)。
以条纹式激光传感器的激光传感节点采集的实时路况信息作为输入变量[18],引入模糊集的概念,设等待通过车辆长度的模糊集为H,车辆平均滞留时间的模糊集为C,N为通信需求度,H和C按照既定的控制规则与N构成一种模糊关系η:

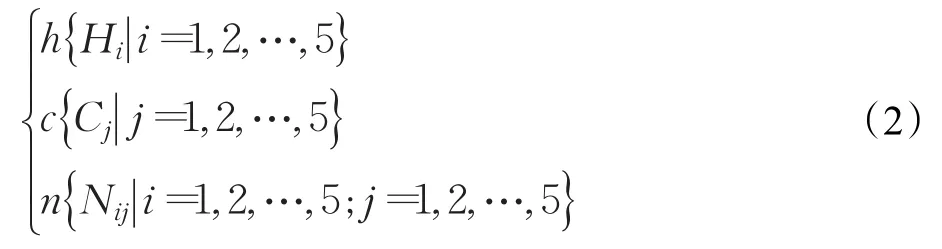
分别采用车辆排队长度hij(t)和车辆在路口的平均滞留时间cij(t)作为输入变量,基于上述的模糊关系η求解出最后的实际通行需求度nij(t)。假定在交通信号路口排队等候的车辆长度语言变量为h、车辆的滞留时间的语言变量为c、实际通行需求度的语言变量为n,模糊集合,可以分别表示为:
则任一条模糊规则所构成的模糊关系ηij可以描述为:

交通信号控制过程中总的模糊关系为:

设在t0时刻激光传感器节点和控制节点传输到协调控制中心车辆长度和滞留时间数据分别为h′和c′,则基于模糊原理推算出的t0时刻实际通行需求度n′,可以表示为:

基于Mamdani模糊推理规则有:

其中 η(h、c、n)为:

为提高拥堵交通信号灯控制算法简捷性,改善运算速度,文章基于singleton对输入的实时激光传感数据进行模糊化处理:

其中ξij为激光传感数据的匹配度,反映系统模糊规则与实时交通路况信息的匹配程度,如果在t0时刻输入车辆排队长度及平均滞留时间的精确输入量为h0和c0,则t0时刻的激光传感数据的匹配度ξij为:

基于模糊原则解出的N′(n)即为论域N上的模糊子集,在道路交通拥堵路口的实际车辆通行需求度n0可以描述为:

确定当前交通路口的拥堵车流长度、车辆的平均滞留时长和等信号时的延误时长,提高十字路口交通信号的控制水平,缓解通行压力。设停车线与激光控制节点之间的距离为di,通行车辆的车长为li,待通过车辆的车头间距为Li,所以每条车道上识别出的最大的车队长度hmax为:

设定每个时间步长为1 s,则在t1时刻末交通路口等待通过的车辆长度为:


当第i个相位为红灯相位时,则在第t1时刻车辆的滞留时间为:

假定在1 s的时长内,车辆能够均匀地到达路口,因此ck′ij(t1)为:

最后,求解出在t1时刻等待通过交通信号路口车辆的总延误时长eij:

本文基于道路信号灯两侧的激光传感节点,获得交通路口的实时路口数据,并依据模糊推理算法计算出车辆滞留的长度和时间,同时根据激光传感网络与控制簇首节点进行数据通信,同样方法计算多个路口的车辆交通情况,综合以上路况,进行统一的调度和安排,完成交通信号灯的有效控制。这种方法在一定程度上缓解了拥堵时段的道路交通状况。
3 实验部分
为验证提出的基于激光传感数据的交通信号控制方法的有效性,以通过交通路口车辆的平均延误时长为具体的评价指标编写仿真程序。
3.1 仿真环境及参数设置
仿真环境为四相位交叉路口,绿灯的最长时间为60 s,最短时间为20 s。路口每条车道的初始车辆由系统随机产生。根据交通路口的实际参数确定黄灯的时长,变灯后车辆通过路口的速率为1 s/辆,其他参数设置如表1所示。
3.2 不同交通流条件下平均延误时长对比
分别在低峰、中锋和拥堵交通流下对传统的单路口交通控制方法和本文基于激光传感数据的信号控制方法进行仿真对比,提取车辆的平均延误时长。首先提取低峰时段的仿真数据,如表2所示。
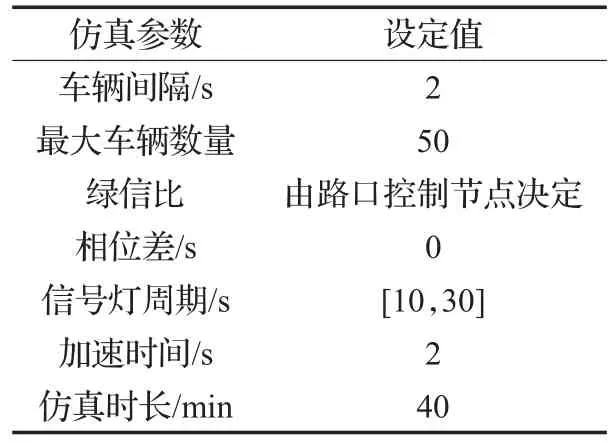
表1 仿真参数设置
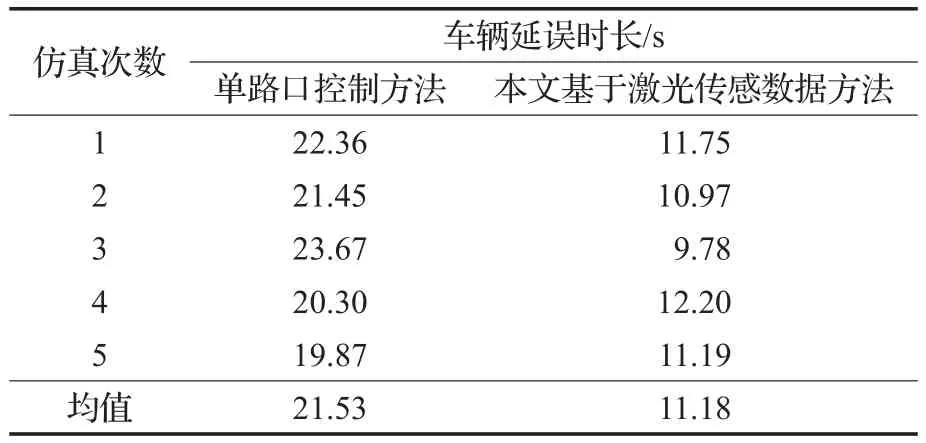
表2 低峰期车辆延误时长数据分析
从图3的曲线走势可以分析出,本文方法在平均延误时长方面控制效果良好,维持在11 s左右,优于传统控制方法的时长。
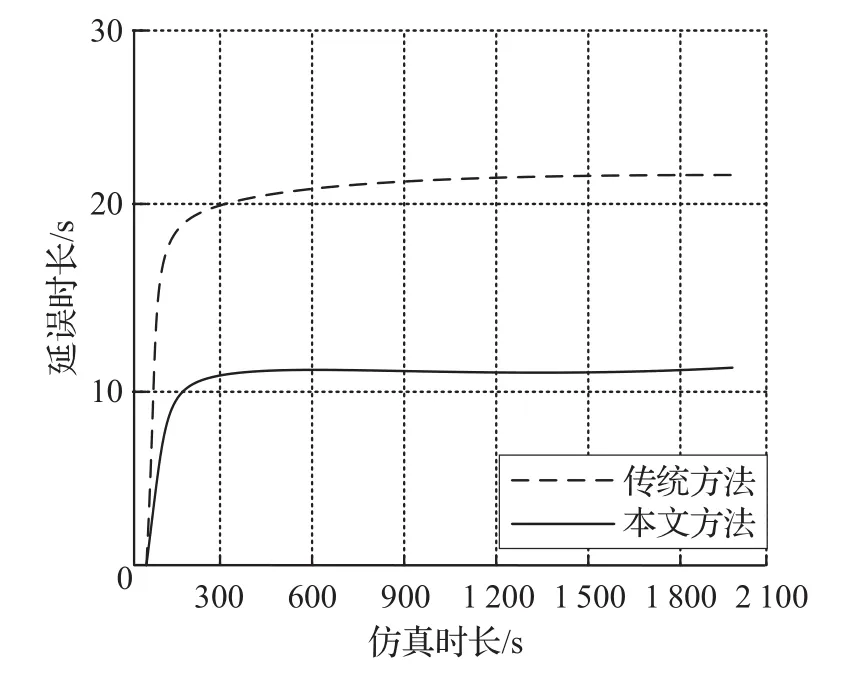
图3 低峰时段车辆延误时长曲线对比
在中度拥堵的路况,两种方法的延误时长都有所增加,但如图4所示随着仿真时间的延长,单路口控制方法下的车辆延误时长急剧增加,证明在交通拥堵情况进一步恶化的情况下,仅靠调度单一路口的交通信号仍无法有效解决干线的拥堵问题,中峰时段的仿真数据,如表3所示。

图4 中峰时段车辆延误时长曲线对比

表3 中峰期车辆延误时长数据分析
最后,本文仿真了两种信号控制方法在拥堵时段的交通信号控制效果,从表4的数据分析和图5的曲线对比结果可以看出拥堵时段随着仿真时间的延长,车辆延误时长都有所增加,但本文方法的控制效果仍然优于单路口交通信号控制方法。

表4 拥堵时段车辆延误时长数据分析
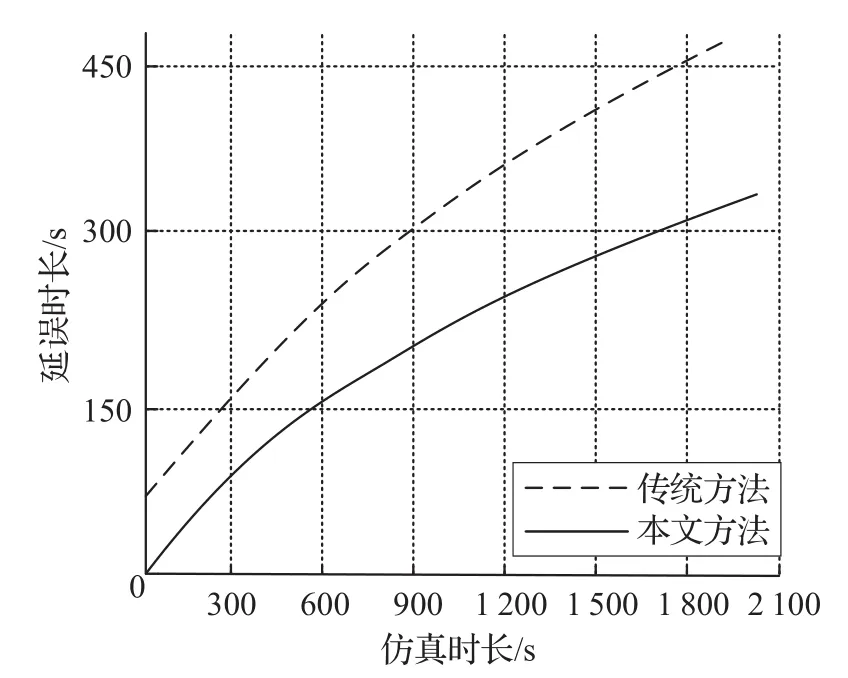
图5 拥堵时段车辆延误时长曲线对比
针对城市道路的交通拥堵问题,本文提出了一种基于激光传感数据的交通信号控制方法研究。通过激光传感节点采集的路口实时数据,并结合多个路口的交通情况进行统一的调度和安排,取得了较好的交通信号控制效果,仿真数据证明了提出方法的有效性。
4 结论
参考文献:
[1]张荣辉,李福樑,周喜,等.一种基于激光与视频信息时空数据融合的行人检测方法[J].交通运输系统工程与信息,2015,15(3):49-55.
[2]骆朝亮.三维激光全景技术在交通行业中的应用[J].测绘通报,2015(6):135-136.
[3]Cheng Z,Qin C,Wang F,et al.Progress on mid-IR graphene photonics and biochemical applications[J].Frontiers of Optoelectronics,2016,9(2):259-269.
[4]Li Zhiquan,Piao Ruiqi,Zhao Jingjing,et al.A low-threshold nanolaser based on hybrid plasmonic waveguides at the deep subwavelength scale[J].Chinese Physics B,2015,24(7):441-447.
[5]冯丽丽,黄海涛,阮驰.高亮度激光交通可变情报板技术研究[J].科学技术与工程,2015,15(3):150-153.
[6]陈延辉,郭朝邦.国外激光技术发展[J].飞航导弹,2015(6):40-44.
[7]裴丽,翁思俊,吴良英,等.光纤激光传感系统的研究进展[J].中国激光,2016(7):1-7.
[8]Viveiros D,Ferreira J,Silva S O,et al.Ammonia sensing system based on wavelength modulation spectroscopy[J].Photonic Sensors,2015,5(2):109-115.
[9]王斐斐,张丽,杨玲珍,等.基于混沌光纤激光的准分布式布拉格传感网络[J].光学学报,2014,34(8):88-92.
[10]杨韫铎,康娟,徐贲,等.基于扫描激光器的边孔光纤光栅温度压力传感系统[J].光子学报,2016,45(6):24-29.
[11]Jun Jing,Wu Lian’ao.Overview of quantum memory protection and adiabaticity induction by fast signal control[J].Science Bulletin,2015,60(3):328-335.
[12]Tiaprasert K,Zhang Y,Wang X B,et al.Queue length estimation using connected vehicle technology for adaptive signal control[J].IEEE Transactions on Intelligent Transportation Systems,2015,16(4):2129-2140.
[13]刘影,高爽,鲍志强,等.基于DBR光纤激光传感器的超声与温度双参量测量研究[J].传感技术学报,2016,29(8):1155-1159.
[14]Timotheou S,Panayiotou C G,Polycarpou M M.Distributed traffic signal control using the cell transmission model via the alternating direction method of multipliers[J].IEEE Transactions on Intelligent Transportation Systems,2015,16(2):919-933.
[15]Zaidi A A,Kulcsár B,Wymeersch H.Back-pressure traffic signal control with fixed and adaptive routing for urban vehicular networks[J].IEEE Transactions on Intelligent Transportation Systems,2016,17(8):2134-2143.
[16]杨润涛,祝连庆,张钰民,等.基于可饱和吸收稳频技术的光纤激光应变传感特性研究[J].纳米技术与精密工程,2016,14(3):201-205.
[17]Wang Q L,Li J Y,Shen H K,et al.Research of multisensor data fusion based on binocular vision sensor and laser range sensor[J].Key Engineering Materials,2016,693:1397-1404.
[18]张铁,李波,邹焱飚.基于条纹式激光传感器与机器人的扫描成像系统[J].红外与激光工程,2015,44(1):53-58.
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
铁道通信信号(2020年8期)2020-01-05 20:30:18
小学科学(学生版)(2019年3期)2019-03-30 01:39:28
铁道通信信号(2019年1期)2019-01-16 00:45:15
电子制作(2018年23期)2018-12-26 01:01:26
铁道通信信号(2018年6期)2018-08-29 01:16:18
小天使·一年级语数英综合(2018年6期)2018-06-22 10:25:54
发明与创新(2016年34期)2016-08-22 03:00:54
华人时刊(2016年19期)2016-04-05 07:56:05