基于ABAQUS的鱿鱼切割机刀具几何参数方案选择
2018-06-01 11:43:57徐兴平祖国强常汉卿
西华大学学报(自然科学版) 2018年3期
冯 帆,徐兴平,祖国强,常汉卿
(中国石油大学(华东)机电工程学院,山东 青岛 266580)
在鱿鱼切割机上安装切割刀具用于切割鱿鱼体。这种刀具对生物软组织体的作用类似于软组织手术过程[1-3]。刀具几何参数不合理可能导致实际切割作业中连肉现象的发生,这在很大程度上降低了切割机的工作效率和质量。
随着有限元分析的日益发展,它在工业中的应用越来越广泛。各企业采用有限元法对产品进行分析,既提高了设计功能,又减少了设计成本。
本文首先对鱿鱼肌肉的力学性能进行分析,用桌面电子万能试验机对鱿鱼肌肉进行拉伸破坏,得到相关的力学参数,然后采用有限元软件ABAQUS对鱿鱼切割机刀具切割过程进行有限元分析,得到相应的应力、应变等力学参数的变化曲线和受力云图,最后,结合软件求解及实际鱿鱼切割实验结果,对鱿鱼切割机的刀具进行分析和选择,确定刀具的最优设计方案,以保证鱿鱼体的切割质量。
1 鱿鱼切割机刀具设计
本文刀具为冲切刀头,如图1所示,采用304不锈钢材料,力学参数中弹性模量E=195 GPa,密度ρ=7 900 kg/m3,泊松比ν=0.247,许用强度197 MPa[4]。刀头由1个刀杆及4个刀片配合而成。刀片形状设计分为6种方案:方案1,下刀面倾角80°,如图2所示;方案2,下刀面倾角75°,如图3所示;方案3,下刀面倾角60°,如图4所示;方案4,下刀面倾角50°,如图5所示;方案5,下刀面倾角40°,如图6所示;方案6,下刀面倾角60°,并且侧刀面带有锯齿,如图7所示。上述刀片厚度均为1 mm,用线切割方法将钢材一次切割成型。
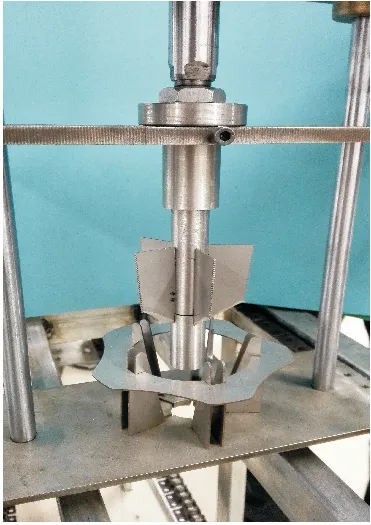
图1 冲切刀头
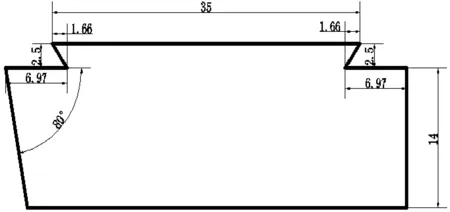
图2 方案1刀具尺寸图

图3 方案2刀具尺寸图
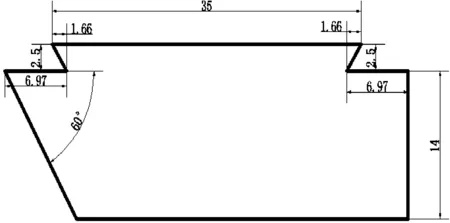
图4 方案3刀具尺寸图
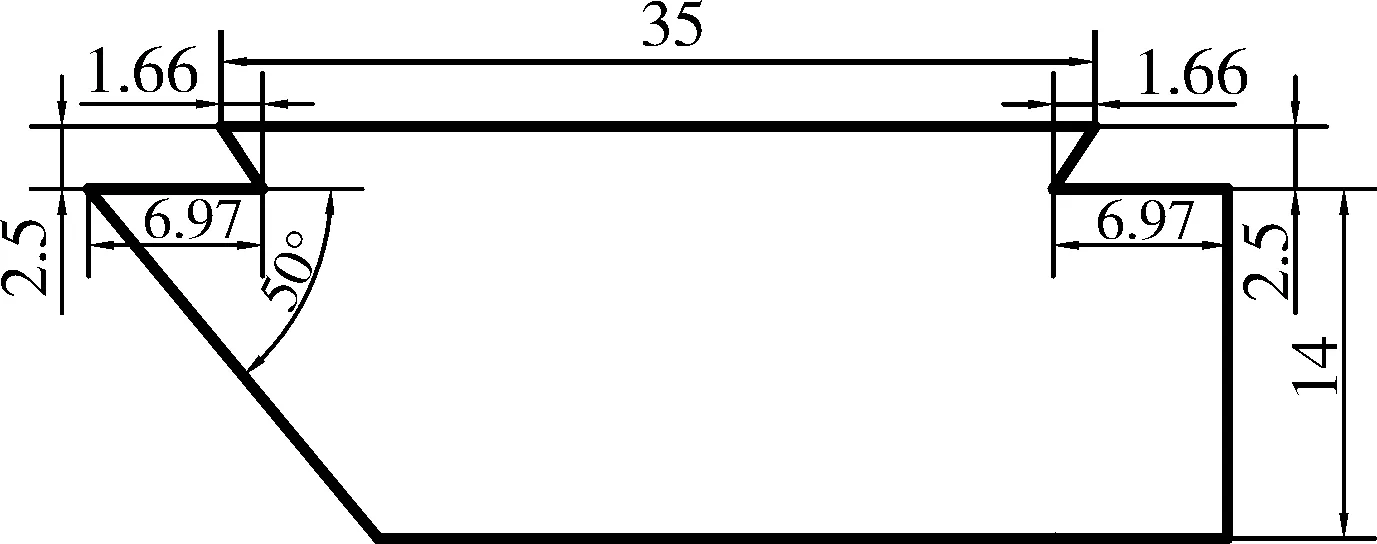
图5 方案4刀具尺寸图
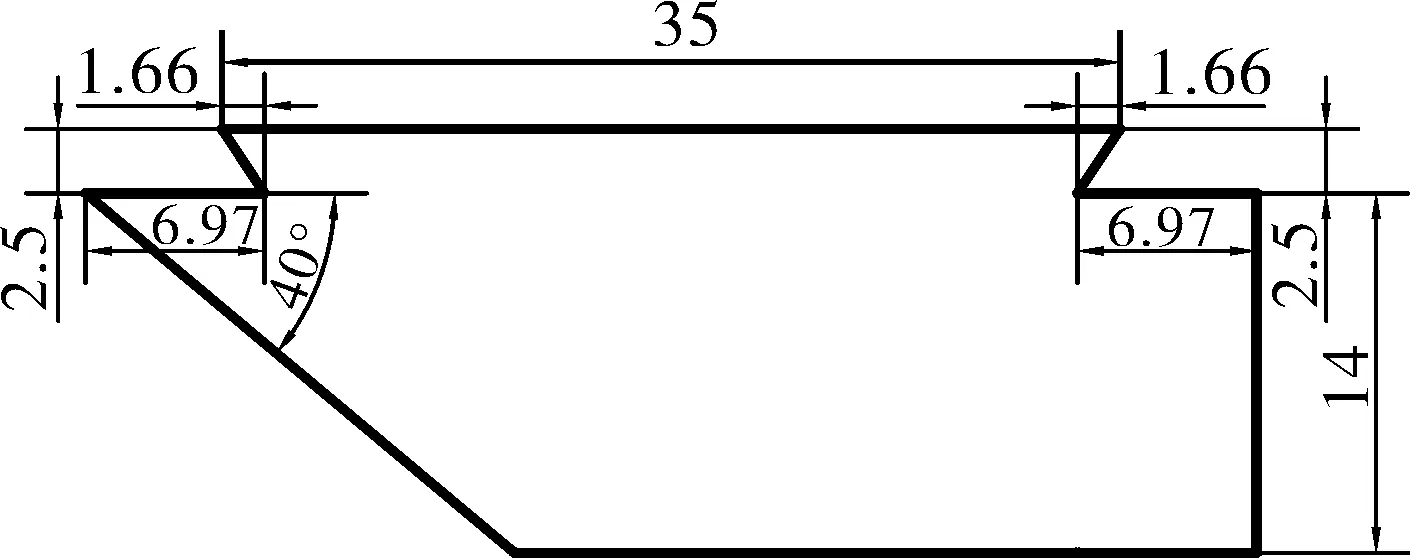
图6 方案5刀具尺寸图
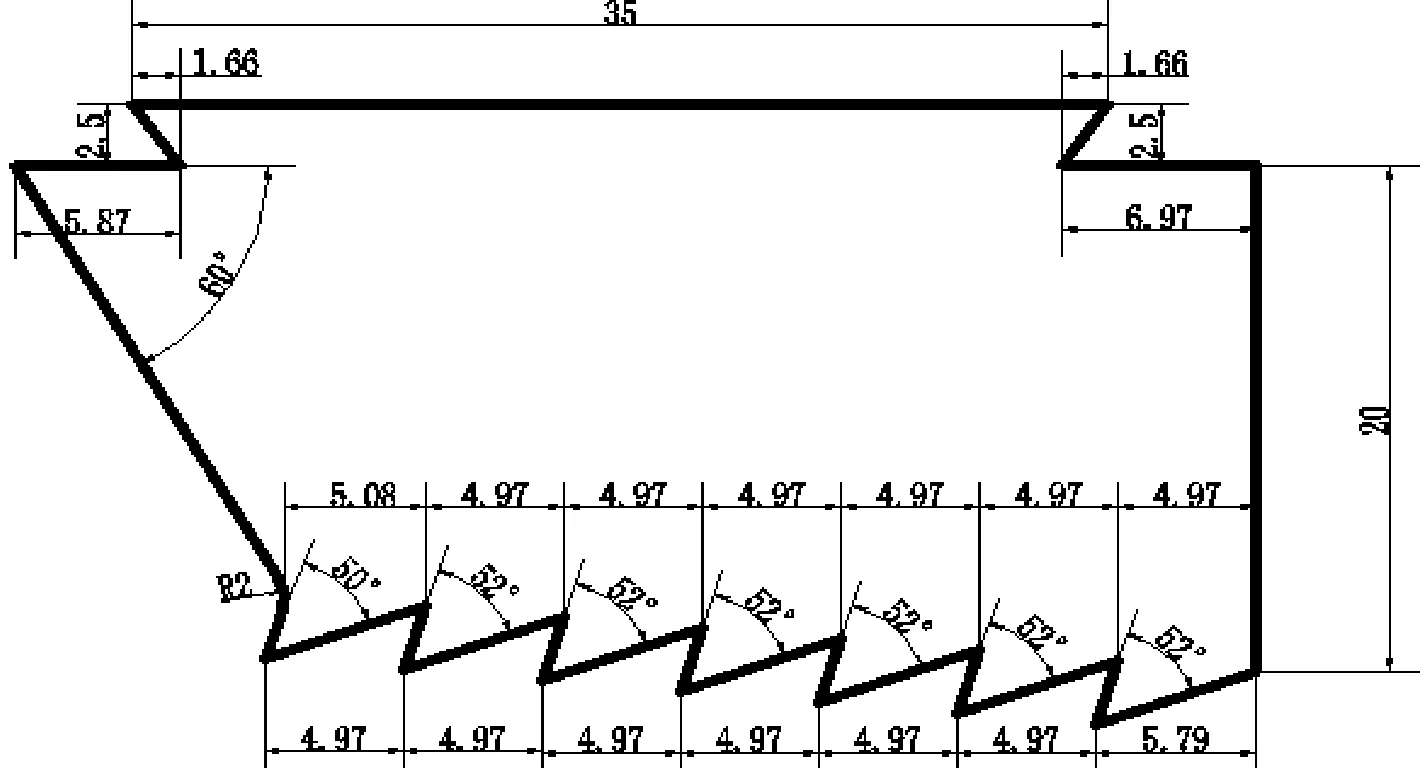
图7 方案6刀具尺寸图
2 鱿鱼肌肉的力学性能实验分析
2.1 实验对象
鱿鱼是生活在水域中的软体生物,依靠腮进行呼吸。许多科学家对动物体的肌肉进行了相关的研究[5-7],但是,对于鱿鱼这种特殊鱼类尚未有相关的研究数据。为此,本文进行了拉伸破坏试验,测得所需的力学参数,如弹性模量、泊松比等。
2.2 力学实验方法与过程
本文采用电子万能试验机,如图8所示,对鱿鱼肌肉进行轴向拉伸试验,并通过公式,估计其相应的力学性能。

图8 电子万能试验机
首先,用刀子将新鲜鱿鱼肌肉裁割为矩形条样。将条样浸泡于生理盐水60 min后,用直尺测量条样的几何参数。
在进行条样松弛实验之前,经过多次加载-卸载过程,目的是稳定条样的力学性能。该实验在室温 (15~25 ℃) 下完成。由于大多数生物软组织不能严格服从应力-应变关系,因此这里忽略载荷速率变化的影响。
在万能电子试验机上将经过处理后的鱿鱼条样进行固定,随后逐步施加荷载进行拉伸实验,直至肌肉条样完全断裂。每组实验都要对所测得的实验数据进行记录。实验时要注意实时数据变化,以保证实验数据合理有效。
2.3 力学实验分析结果
将测得的实验数据用MATLAB拟合成σ-ε曲线,即得到鱿鱼肌肉拉伸破坏的实验结果,如图9所示。
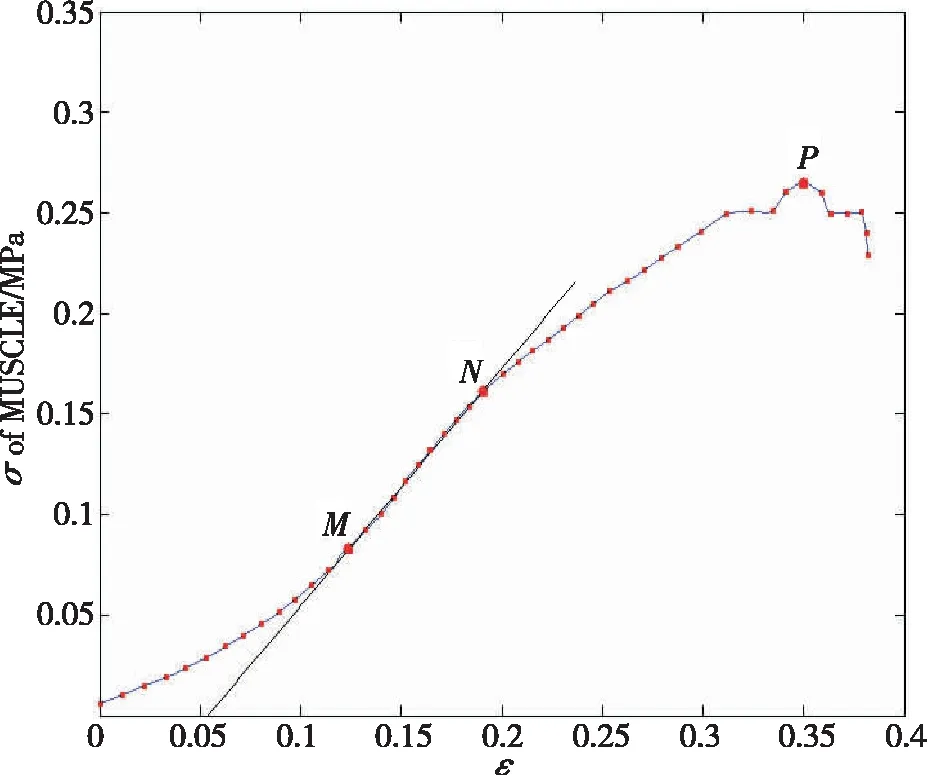
图9 鱿鱼肌肉拉伸破坏的典型实验结果
由图可知,鱿鱼肌肉条样应力应变关系大致分为3部分:第1条OM段,应力与形变大约为二次函数关系;第2条MN段大致为一条等比例直线,鱿鱼条样的弹性模量E可根据MN直线的拟合结果来确定;第3段NP段曲线呈非线性变化,说明鱿鱼条样开始出现塑性变形,并在P点达到强度极限,随后条样产生破坏。通过计算并结合图9分析可知,鱿鱼条样的弹性模量E为4 374 MPa,强度极限为0.25~0.30 MPa。
3 基于ABAQUS的刀具切割鱿鱼仿真
3.1 鱿鱼切割仿真原理
鱿鱼肌肉的切割过程包含复杂的弹塑性变形,用经典力学的相关理论无法对其进行分析和求解;因此,本文采用ABAQUS对鱿鱼肌肉的切割过程进行分析,以剪切失效和单元删除方法作为鱿鱼体的分离准则,对切割过程进行数值仿真,并对鱿鱼体的切割应变、应力、动能变化、应变能变化等进行分析。
在分析鱿鱼体受力变形时,将刀具视为刚体结构,对鱿鱼肌肉进行切割仿真,并选择Johnson-cook剪切失效模型。Johnson-cook剪切模型是一种基于单元积分点的等效塑性应变,当材料失效参数ω超过1时,软件认定为单元失效。在ABAQUS软件界面中该部分模型单元将被删除,即鱿鱼体模型发生分离。
模型中失效参数定义为
(1)

综合考虑各因素对鱿鱼材料硬化应力的影响,应用Johnson-cook等向强化模型,其静态屈服应力公式为
有效容积为2 000 mL的高压反应釜,烧杯1 000 mL,量筒1 000 mL,电子天平,计时器,真空泵,抽滤瓶,热风循环烘箱,高速粉碎机,80目标准筛。
(2)

由于Johnson-cook剪切失效模型适用于非线性变化的模型仿真,因此其对于鱿鱼条样切割过程的仿真模拟十分适用。
3.2 切割仿真过程
下面以方案1中的刀具为例对切割过程进行探究。考虑到鱿鱼体模型与刀具的前、后刀面均存在约束[8-10],因此,需要在这2个接触对上设置接触与目标单元来模拟整个接触过程。建立如图10所示的鱿鱼体条样二维模型(模型尺寸为10 mm×5 mm),并将实验获得的弹性模量、泊松比等参数带入模型中。对鱿鱼条样模型采用稳定性较好的 CPE4R一阶线性减缩平面四边形单元,并将刀具设置为解析刚体。关于约束,要在条样模型的右侧和底部约束全部自由度,使之完全固定。
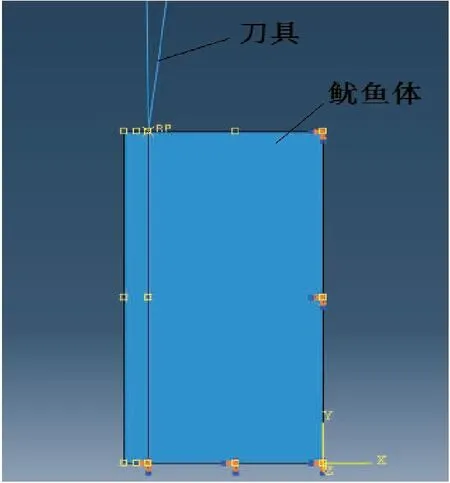
图10 二维切割模型的建立
在Load模块中,刀具右端施加竖直向下的位移,刀具以给定的速度(-120 mm/s)向下移动,形成切割过程,该切割过程中将应用软件自带的自适应网格技术。
鱿鱼体的分离过程通过ABAQUS/explicit中的单元删除及材料失效准则的方法来实现。当鱿鱼体的切割达到分离准则时,失效单元会被删除并将不再承载应变或应力,随着此过程的不断进行,最终实现鱿鱼体的完全分离。
3.3 仿真结果分析
刀具切割鱿鱼体仿真过程的受力云图如图11所示。
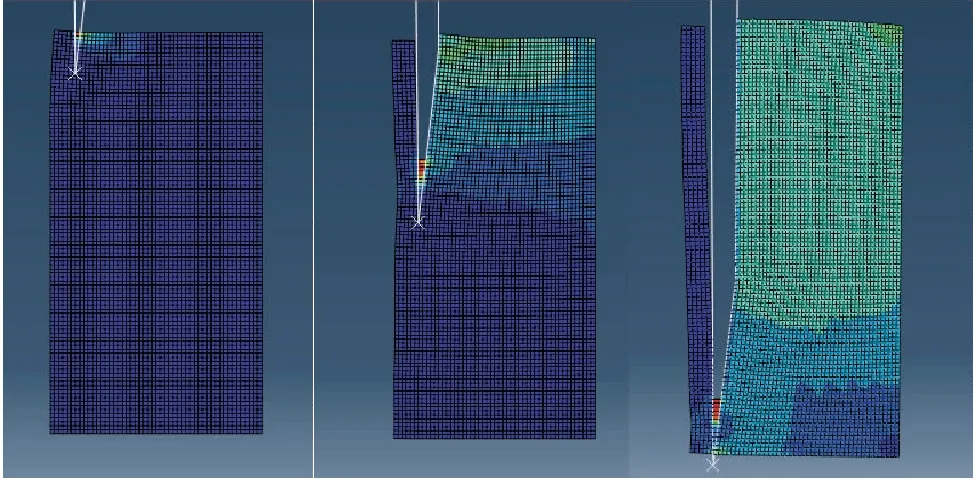
图11 仿真过程受力云图
经过后处理的鱿鱼体Mises应力、动能以及应变能沿断裂边缝节点路径的变化情况如图12—14所示。
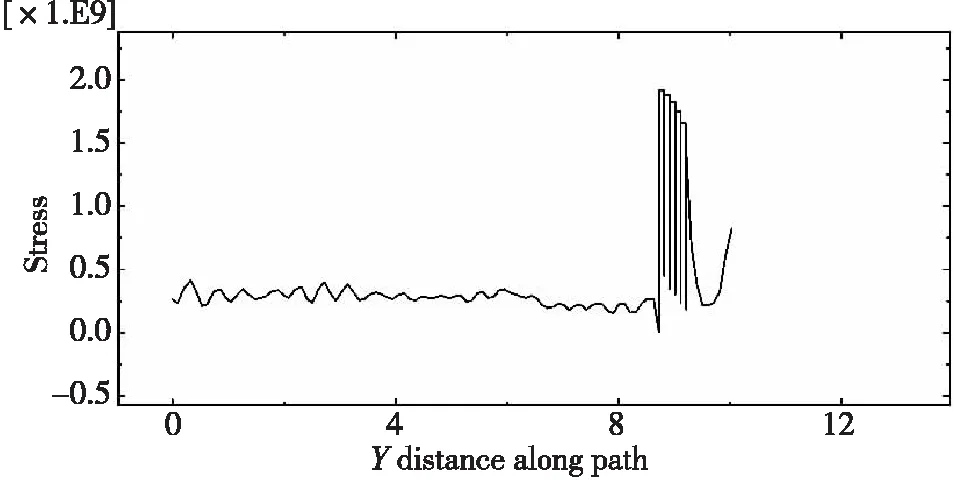
图12 Mises应力沿断裂节点路径变化曲线
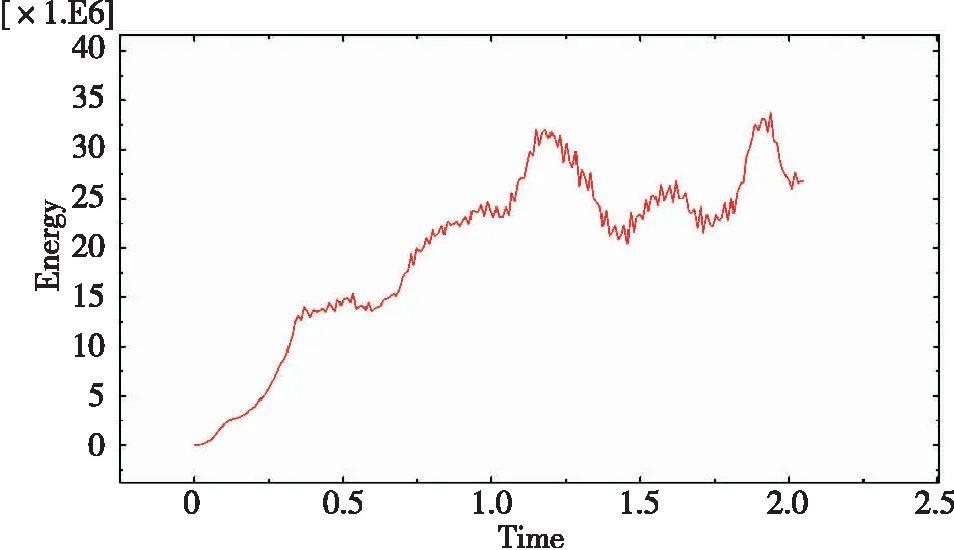
图13 动能随时间变化曲线

图14 应变能随时间变化曲线
3.4 刀具切割综合分析
同理可得方案1至方案6刀具仿真过程,各方案刀具仿真受力变形云图如图15—20所示。
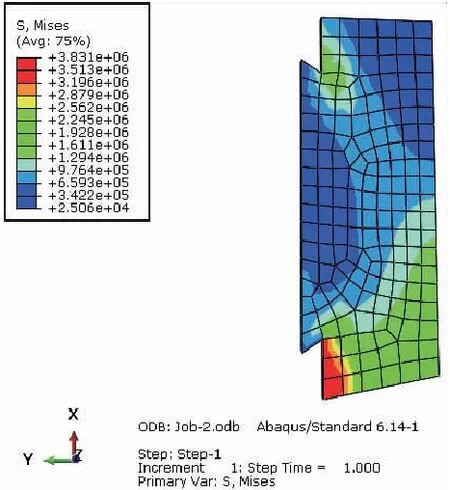
图15 方案1云图
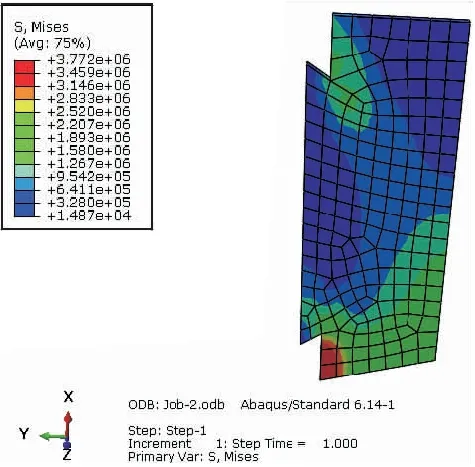
图16 方案2云图
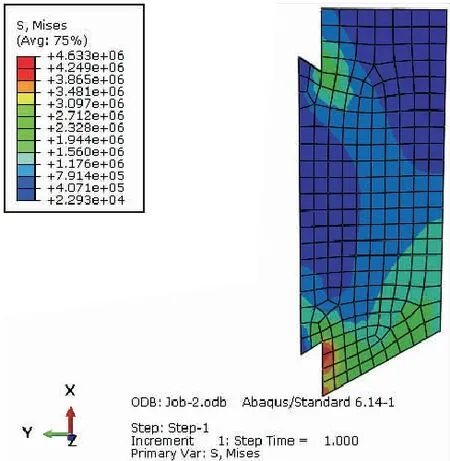
图17 方案3云图
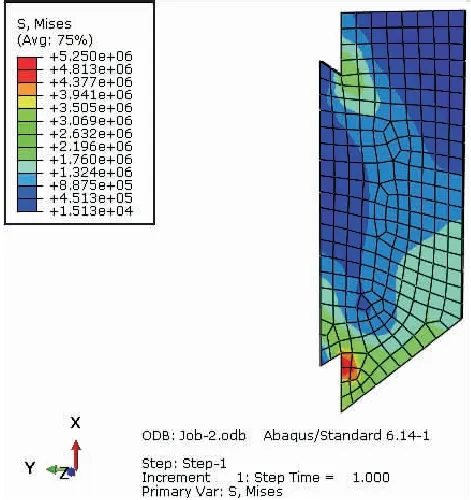
图18 方案4云图
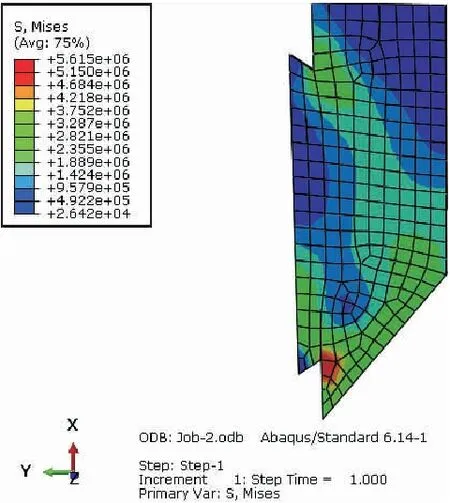
图19 方案5云图
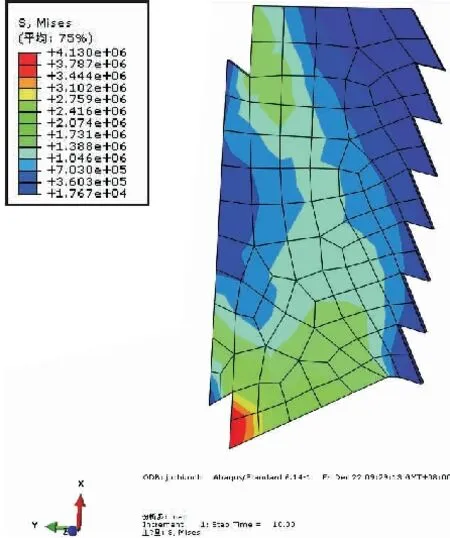
图20 方案6云图
6种方案刀具动能、应变能随时间变化曲线情况如图21—22所示。
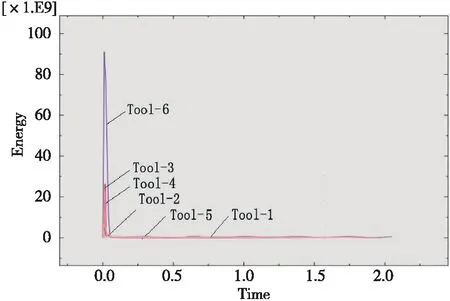
图21 动能随时间变化曲线

图22 应变能随时间变化曲线
读取曲线数值,可得动能随时间变化曲线峰值大小为(Tool后面序号代表方案号):
Tool-1,Ymax=2.141×107;Tool-2,Ymax=2.145×107;Tool-3,Ymax=2.163×107;Tool-4,Ymax=2.155×107;Tool-5,Ymax=2.143×107;Tool-6,Ymax=9.099×107。
应变能随时间变化曲线峰值大小为:
Tool-1,Ymax=7.368×107;Tool-2,Ymax=7.894×107;Tool-3,Ymax=8.100×107;Tool-4,Ymax=7.998×107;Tool-5,Ymax=7.723×107;Tool-6,Ymax=1.398×108。
根据仿真结果及鱿鱼切割实验,如图23—24所示,首先对利用方案1—5进行切割的情况进行分析。方案1—5刀具的下刀面倾角依次减小。在仿真模拟中:方案1至方案3刀具的动能、应变能依次增大;方案4刀具的动能、应变能略小于方案4刀具,大于方案2刀具;方案5刀具的动能、应变能仅大于方案1刀具。这说明刀具的动能、应变能先增大后变小,刀具下刀面倾角为50°~60°时可获得较大的动能、应变能。


图23 鱿鱼切割实验 图24 切割效果图
在实际实验中,5种方案均出现了连肉现象,方案1、方案5的现象较为明显,方案3、方案4的现象较轻,这表明较大的动能和应变能有利于鱿鱼体的切割,在进行鱿鱼切割作业时可安装下刀面倾角为50°~60°的刀具以保证最佳效果。
为进一步研究锯齿对切割作业的影响,本文对下倾角同为60°的方案3无锯齿刀具、方案6锯齿状刀具进行分析。在实际实验中,利用方案6的锯齿状刀具进行鱿鱼体切割时,极少发生连肉现象,对应仿真结果体现为方案6刀具的动能、应变能明显大于方案3刀具,且方案6刀具的应变能出现了较大波动。这说明刀具锯齿可以产生较大动能、应变能及大振幅能量波动,更有利于鱿鱼体的切割。现实生产中,在优化下刀面倾角的基础上,可以选择锯齿刀具,以解决其他刀具易发生连肉的问题。
4 结束语
针对鱿鱼切割机进行实际作业时容易出现连肉的现象,本文提出了一种利用电子万能试验机进行拉伸试验获取相关力学参数,用ABAQUS进行有限元分析,结合软件求解结果及实际鱿鱼切割情况选择刀具几何参数的方法。分析结果表明:下刀面倾角为50°~60°的刀具提供的动能、应变能较大;倾角在这个区间内且带有锯齿的刀具不仅会提供更大的动能、应变能,而且会产生大振幅能量波动,能大幅降低连肉现象的发生。按此方案进行设计的刀具,能充分提高鱿鱼切割机的工作效率及鱿鱼体的切割质量,并且进一步降低劳动力投入,为海洋产品生产企业的产业结构升级提供有力帮助。
参 考 文 献
[1] 陈帅,郑津津.一种用于实时软组织变形仿真的有限元模型[J].工业控制计算机,2015,28(7):117-118.
[2] 山君良,司伟鑫,李小萌,等.交互式基于点的外科手术软组织变形仿真[J].系统仿真学报,2015,27(10):2380-2386.
[3] 高瞻,潘飞,王杰华,等.虚拟软组织针刺与力觉交互[J].系统仿真学报,2015,27(10):2453-2459.
[4] 王建青,宋云涛,武松涛,等.ITER 磁体过渡馈线的结构设计与优化[J].核技术,2006(4):271-275.
[5] GREVEN H,ZANGER K,SCHWINGER G.Mechanical properties of the skin of Xenopus laevis(Anura Amphibia)[J].Journal of Morphology,1995,224(1):15.
[6] FUNG Y C.Biomechanics: Mechanical of living tissues[M]. Berlin, Germany: Springer,1993.
[7] MOSS R L.Elastic and viscous properties of resting frog skeletal muscle[J].Biophysical Journal,1977,17(3):213-228.
[8] 戚宝运,李亮,何宁,等.表面织构在刀具减磨技术中的应用[J].工具技术,2010,44(12):3-6.
[9] 戴振东,佟金,任露泉,等.仿生摩擦学研究及发展[J].科学通报,2006,51(20):2353-2359.
[10] 韩志武,任露泉,刘祖斌.激光织构仿生非光滑表面抗磨性能研究[J].摩擦学学报,2004,24(4):289-293.
猜你喜欢
工具技术(2023年9期)2023-10-24 02:21:54
中国机械工程(2022年16期)2022-09-03 01:47:16
金桥(2022年4期)2022-05-05 06:09:50
海外星云(2021年6期)2021-10-14 07:20:48
动漫星空(兴趣百科)(2020年12期)2020-12-12 05:31:32
现代装饰(2018年11期)2018-11-22 07:27:46
人大建设(2018年7期)2018-09-19 06:18:58
商周刊(2018年15期)2018-07-27 01:41:16
快乐语文(2018年12期)2018-06-15 09:11:02
商周刊(2018年11期)2018-06-13 03:41:52