
一种改进的永磁同步电机永磁磁链观测算法
2018-05-31 03:58韩如成
电气传动自动化 2018年1期
张 杰,韩如成
(太原科技大学电子信息工程学院,山西太原030024)
1 引言
近年来,永磁同步电机实时观测系统受到广大研究人员的密切关注[1]。为了尽快发现电机系统出现的故障,防止故障恶化,需要对电机参数实时观测。随着电机系统不断更新、发展,电机参数观测逐渐成为一项研究的热点。
永磁磁链是电机参数中重要的一部分。它能反映出永磁体的工作状态。电机在发生故障后,输出转矩降低,为了能够保持原来的转矩输出,电机的输入电流将会增大,导致电机温度持续上升,极易使永磁体产生失磁故障[1]。因此,对电机永磁磁链进行实时观测十分重要。
在不同阶段研究人员对永磁磁链的观测都提出自己的新方法。文献[2-5]分别采用最小二乘法、模型参考自适应法、滑膜变结构法以及卡尔曼滤波法对电机永磁磁链进行辨识。基于观测器需要对电机参数不敏感,才能使观测结果更加准确。本文采用卡尔曼滤波算法构建永磁磁链观测器。
由于电机系统是非线性模型,传统卡尔曼滤波法会在计算过程中产生线性化误差。为了使监测结果更加精确,观测器采用无迹卡尔曼滤波(UKF)做为主体算法。无迹卡尔曼滤波(UKF)以无迹变换(UT)为核心,在原状态分布中按照一定规则选取一些采样点(称为sigma点集),再代入非线性函数中计算,避免了在线性化处理的过程中产生误差。
为了进一步提升观测的精确度,本文采用阻尼的高斯-牛顿算法对预测值进行迭代。但加入迭代部分后,算法的计算量会急剧增加,加重系统计算负担。为了缩短算法运行时间,用超球体采样代替UKF中的对称分布采样。通过对UKF进行改进,使观测器在减少计算量的同时,提高观测精度。
2 永磁同步电动机的数学模型
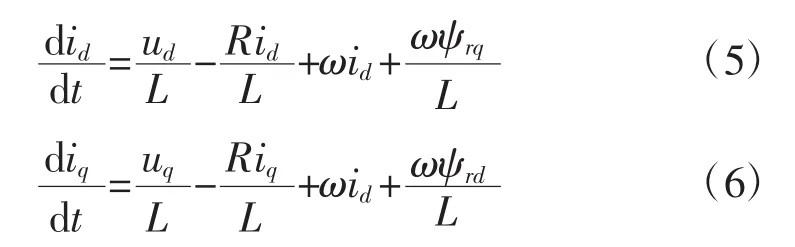
在同步旋转坐标(dq坐标系)下,永磁同步电机的电压方程组可以写为

其中 ud、uq分别为定子电压的 dq 轴分量,Ld、Lq分别为dq轴电感分量(隐极式永同步电机Ld=Ld=L),R为定子的电阻,ω为同步转速,ψr为永磁体磁链,id、iq为定子电流的 dq 轴分量[6]。
在永磁同步电机正常运行时,由于反馈装置会出现误差,导致电机磁链矢量相对于d轴产生偏差角γ此时将会产生永磁磁链投影在dq两轴的 ψrd,ψrq分量。对应的电压方程组则改变为[7]:

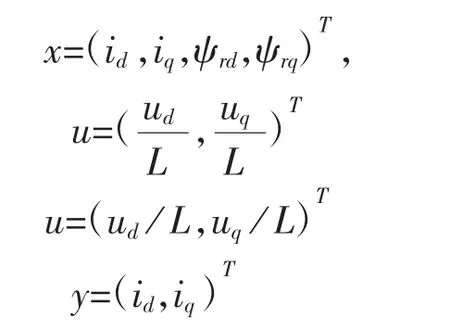
把永磁磁链作为待观测量,则电压方程可以改写为:
在实际情况中,永磁体磁链波动时间远远大于系统动态过程的时间,反馈装置产生的误差不会造成磁链幅值的大幅度变动,所以相对于系统状态变量,ψrd,ψrq几乎不变,于是就有方程组:

选取状态变量
非线性系统模型和离散非线性测量方程可以写为:

在上式中

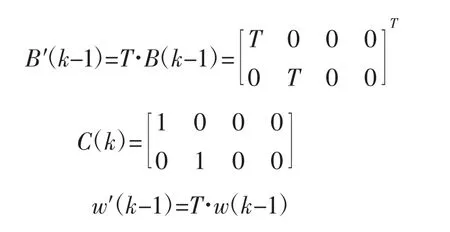
其中,w(t)为系统噪声,v(t)为测量噪声。将状态方程离散化,T 为系统采样周期[7]。
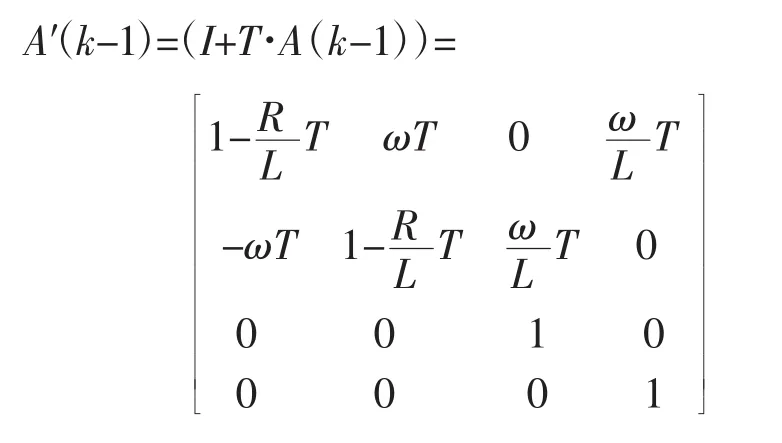
则状态方程可以表示为:
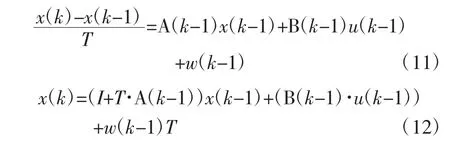
将式(2)改写为:

测量方程为:
3 UKF算法的改进
3.1 超球体采样
对于n维系统,UKF一般采用对称分布采样法,即要有2n+1个采样点进行UT变换。当系统矩阵较多时,计算量大幅度增加,就会影响监测效果。所以需要在保证监测效果的前提下减少采样点。而对于超球体采样法,Sigma点(采样点)的个数只需要n+2(考虑中心点)个,Sigma点(采样点)确定的具体流程如图1所示[8-9]。
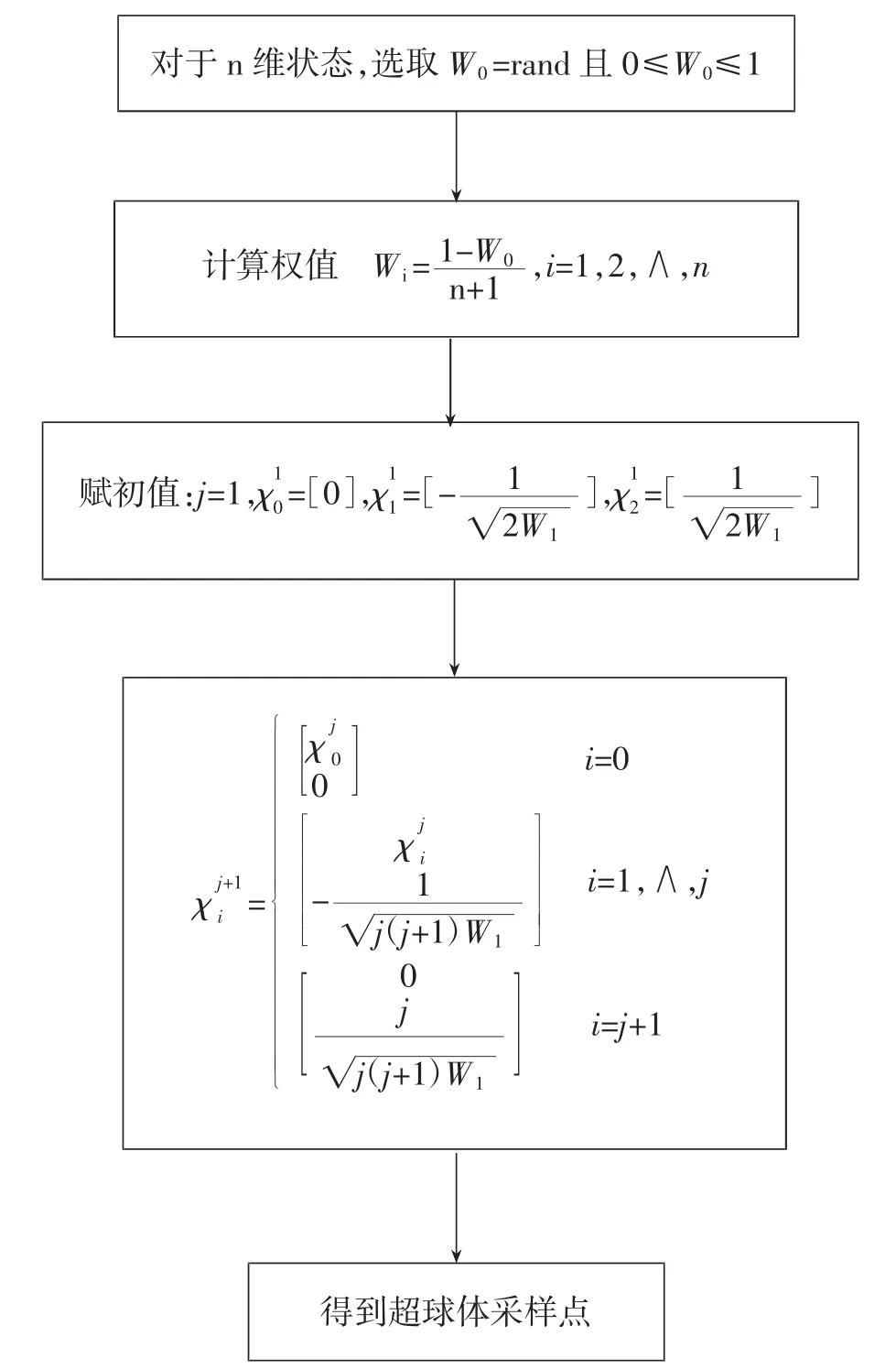
图1 超球体采样流程


3.2 UKF 算法
根据第一章的系统方程代入UKF中作如下运算[10、11]:
(1)系统状态的初始化(x0为初始值)

(2)对所生成的Sigma点加入系统状态初始化后的均值x0和协方差P0为:

(3)超球体UKF算法时间更新步骤
对于 k=1,2,∧
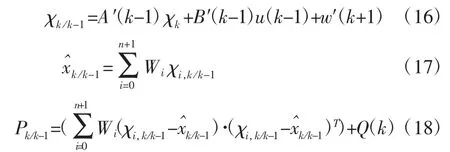
Q为系统噪声的协方差矩阵。
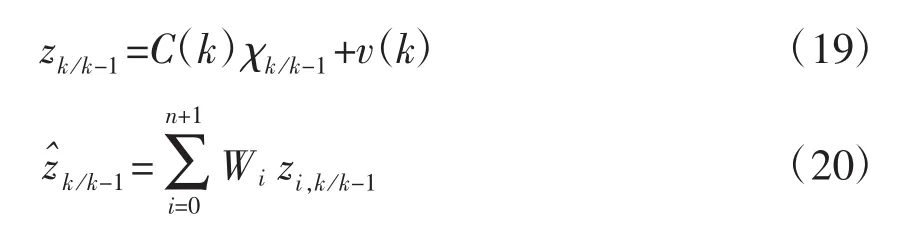
(4)超球体量测更新步骤为:

R为量测噪声的协方差矩阵。
3.3 迭代部分
迭代算法的步骤:


若满足,l=l+1,执行b步骤;若不满足,则进行下一步。
3.4 回溯部分
回溯算法的步骤[12-13]。


a.若为第一次回溯,则;
4 仿真结果及分析
永磁同步电机的永磁磁链监测原理如图 2所示。

图2 仿真结构原理
用Matlab2015a的Simlink仿真软件搭建永磁同步电动机矢量控制系统的模型。永磁同步电动机的参数如表1所示。
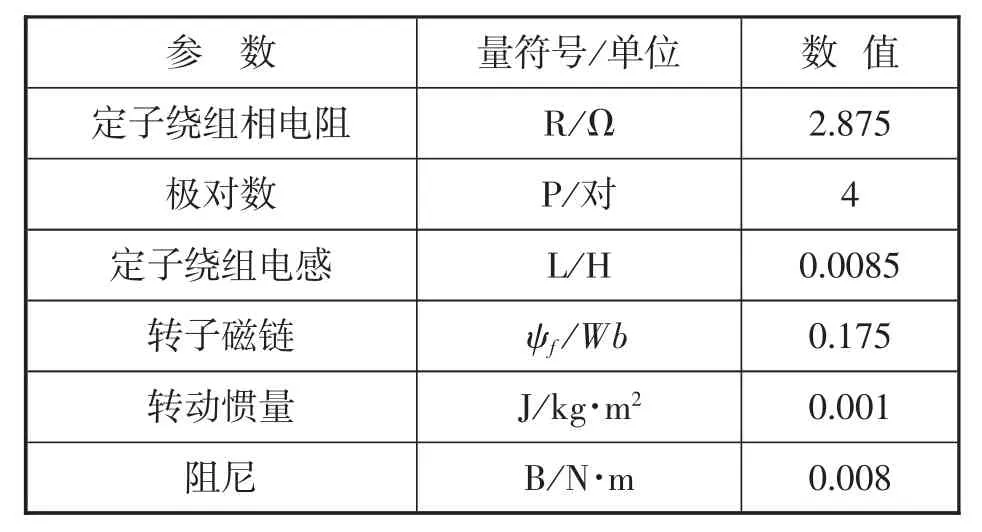
表1 电机参数

仿真系统速度给定值为300r/min,分别用UKF和SSIUKF对永磁同步电机的d-q轴永磁磁链进行观测,d轴磁链分量的标准值为0.175Wb,q轴磁链分量的标准值为0Wb。观测结果如图3至图6所示(左图为UKF观测,右图为SSIUKF观测)。
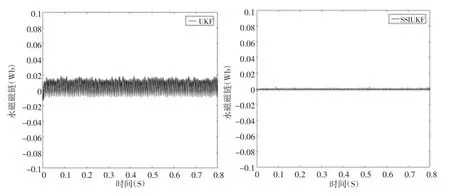
图3 永磁磁链q轴幅值
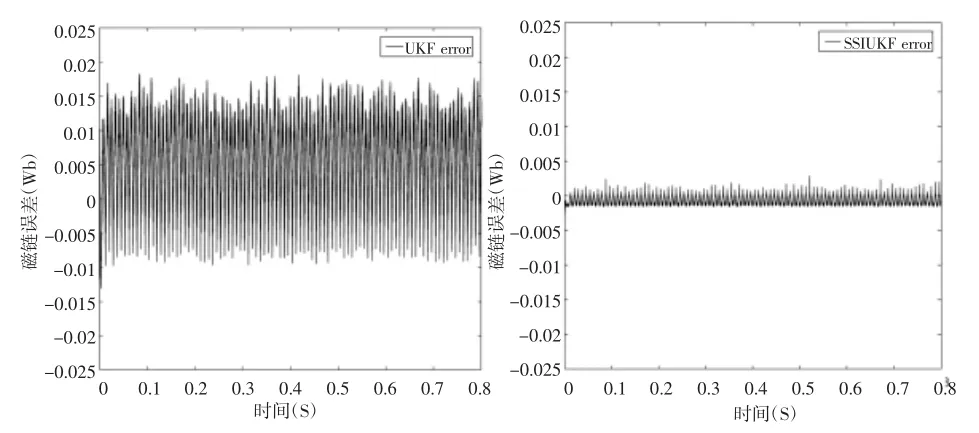
图4 永磁磁链q轴幅值误差
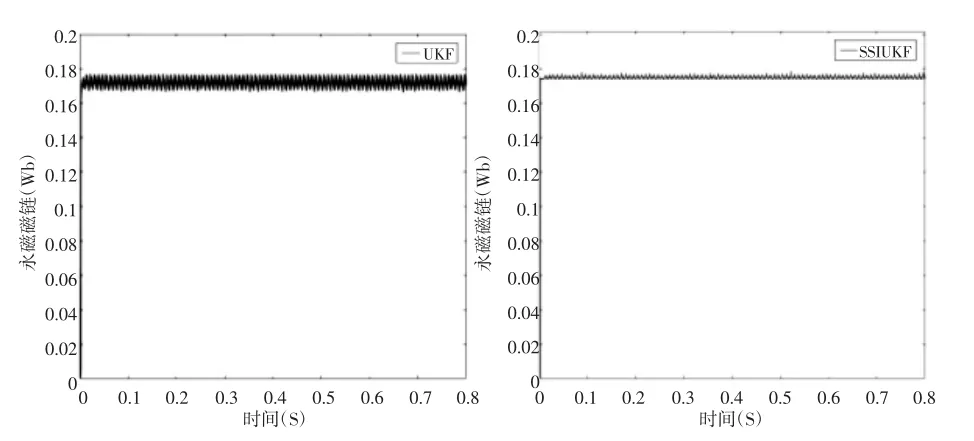
图5 永磁磁链d轴幅值
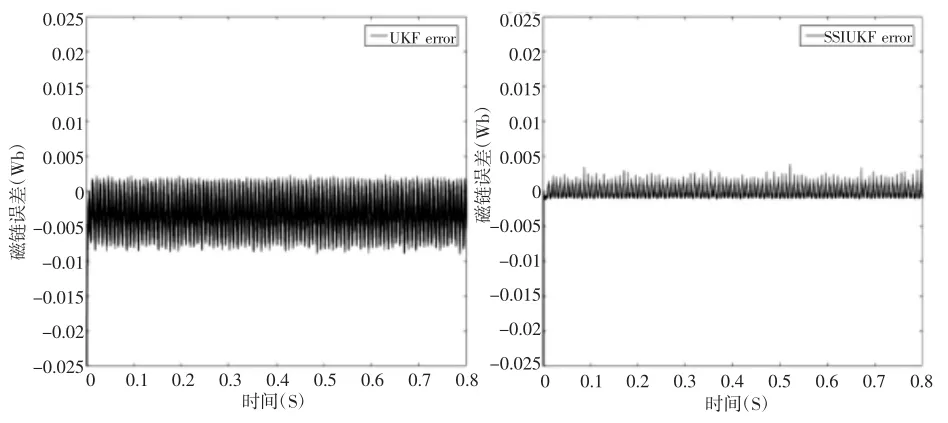
图6 永磁磁链d轴幅值误差
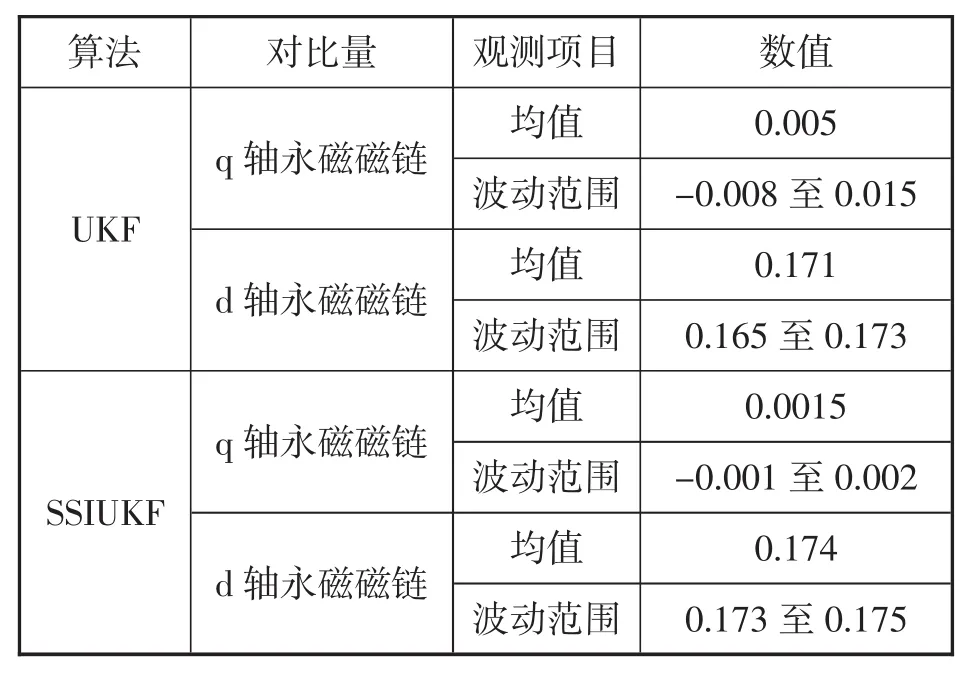
表2 两种算法仿真结果
以上仿真结果表明,UKF算法观测的磁链幅值精确度低,波动大;而SSIUKF算法观测的磁链幅值则精确度高,波动小。
电机定子电阻变为原来的2倍(R=2R0),其它参数不变时,采用SSIUKF的磁链观测结果如图7所示(左图为d轴永磁磁链分量幅值,右图为q轴永磁磁链分量幅值)。

图7 R=2R0的永磁磁链观测结果
电机定子电感变为原来的2倍(L=2L0),其余参数不变时,采用SSIUKF的磁链观测结果如图8所示(左为d轴永磁磁链分量幅值,右图为q轴永磁磁链分量幅值)。
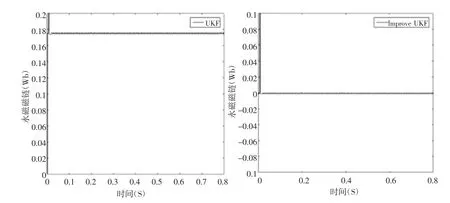
图8 L=2L0的永磁磁链观测结果
当 R=2R0,d轴永磁磁链分量平均幅值为0.175Wb,波动范围为 0.173Wb 至 0.176Wb;q 轴永磁磁链平均幅值为0.003Wb,波动范围为-0.005Wb至 0.013Wb。
当L=2L0,d轴永磁磁链分量平均幅值为0.174Wb,波动范围为 0.172Wb 至 0.175Wb;q 轴永磁磁链平均幅值0.004Wb,波动范围为-0.006Wb至 0.08Wb。
由仿真结果可以看出,当定子电阻,电感改变时,采用SSIUKF算法观测的永磁磁链几乎不变,说明算法在监测过程中不受电机参数影响,能准确的辨识永磁磁链。
为了进一步验证算法的实时性,在相同的条件下,得出两个算法的单次运行时间,为了使这个时间更具有可靠性,避免程序或者系统误差,计算时采取多次测量并取平均值,通过测量得到表3所示的数据。
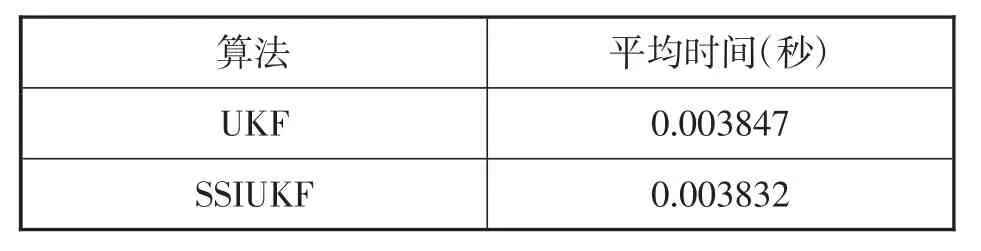
表3 两种算法运行时间
5 实验验证
为了验证仿真结果,在DSP电机控制平台上进行了试验,控制芯片采用TMS320F2812,实验所用永磁同步电动机的参数与仿真中电机参数(表1所示)相同。试验结果如下所示,转速指定为300 r/min。
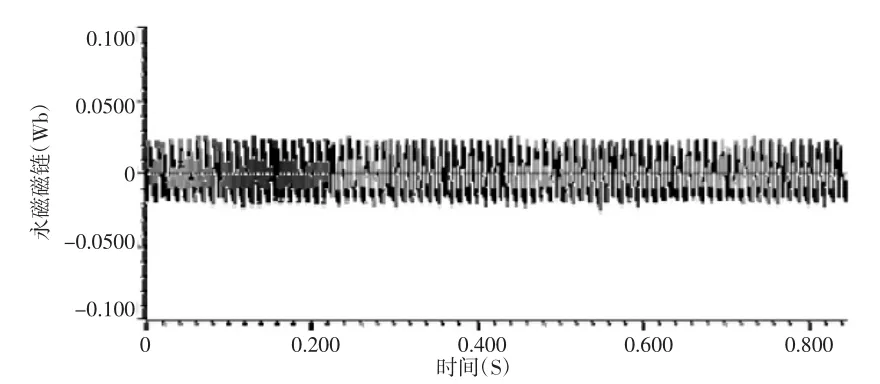
图9 UKF算法观测的q轴磁链幅值
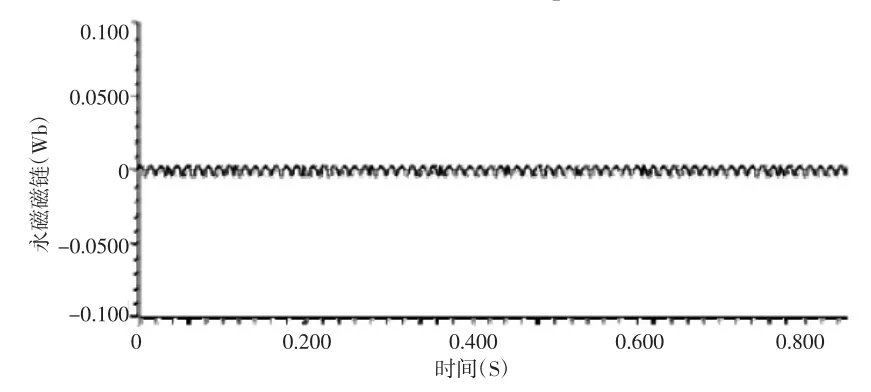
图10 SSIUKF算法观测的q轴磁链幅值

图11 UKF算法观测的q轴磁链误差
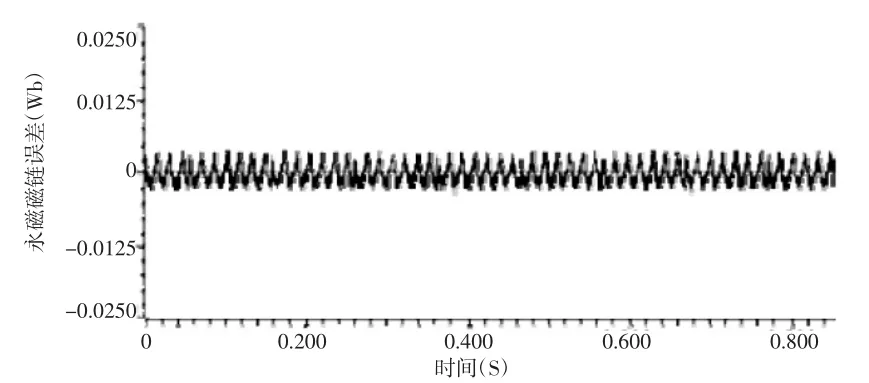
图12 SSIUKF算法观测的q轴磁链误差
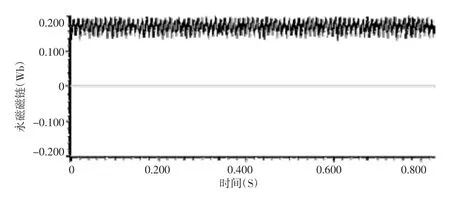
图13 UKF算法观测的d轴磁链幅值
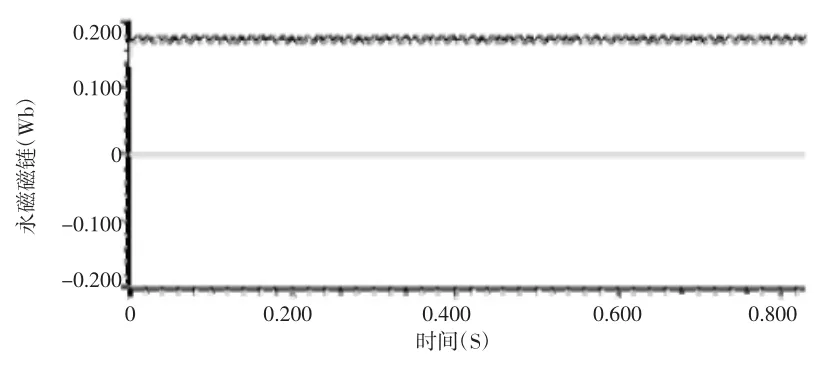
图14 SSIUKF算法观测的d轴磁链幅值
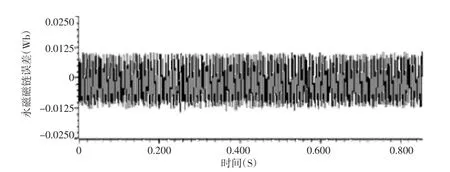
图15 UKF算法观测的d轴磁链误差
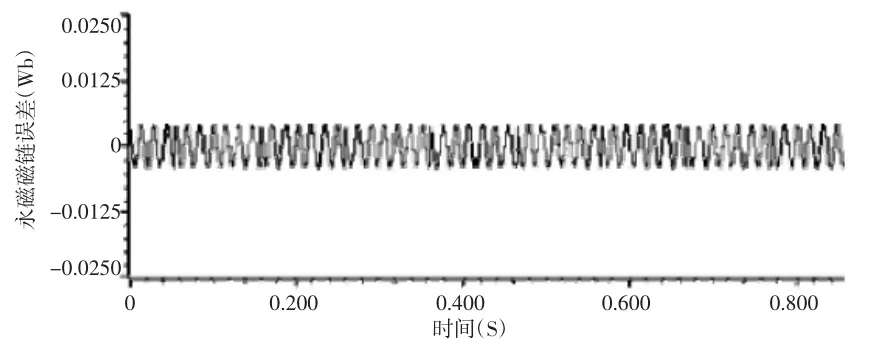
图16 SSIUKF算法观测的d轴磁链误差
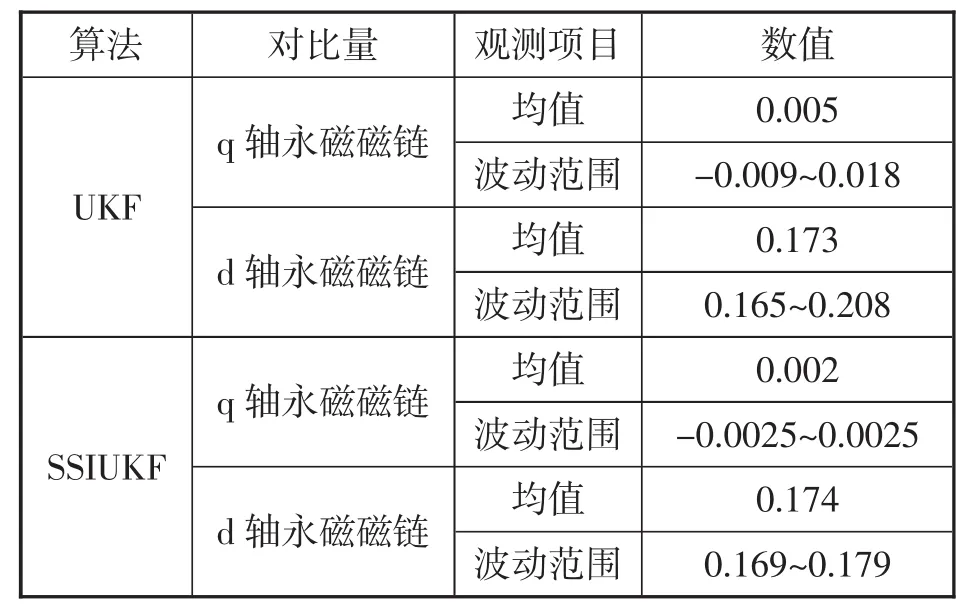
表4 两种算法实验结果
图9、图10与图3相对应。将图11、图12与图4相对应。图13、图14与图5相对应。图15、图16与图6相对应。对比仿真和实验的结果图发现,试验结果中的磁链幅值误差均比仿真结果波动大,平均值与标准值的差值也比仿真结果大,这是由于仿真条件与试验条件不同导致的。
从表4中可以发现:用SSIUKF算法比用UKF算法监测永磁磁链幅值波动小,更加精确,上述结论与仿真得到的结论是一致的。
6 结束语
在监测永磁磁链幅值方面,仿真与实验的结果都表明SSIUKF算法比UKF算法监测准确度更高。在计算时间方面,通过对单次算法运算时间的结果对比,可以看出SSIUKF算法观测器与UKF算法观测器的运算时间大致相同,说明改进后的算法也具有实时观测能力,可以及时地、准确地观测磁链状态。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
电子制作(2017年7期)2017-06-05
电测与仪表(2016年15期)2016-04-12
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电源技术(2015年5期)2015-08-22
电测与仪表(2015年7期)2015-04-09
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
