基于无人机实景三维建模技术的智慧校园构建
2018-05-30 03:14党晨光刘军强刘腾飞徐超
智能建筑与智慧城市 2018年5期
党晨光,刘军强,刘腾飞,徐超
DANG Chen-guang,LIU Jun-qiang,LIU Teng-fei,XU Chao
(西安工业大学机电学院 )
(Xi’an Technological University School of Mechatronic Engineering )
1 引言
传统的三维建模是通过相机地面拍照,得到建筑物侧面纹理[1],后期利用3ds max做出假的三维模型白板,然后将建筑物纹理贴在白板模型上,得到建筑物三维模型[2]。由于是人工地面采集纹理,这种方法得到的三维模型在模型顶部会有纹理丢失,而且工艺复杂,生产成本高,并不适合大面积实景三维建模。基于无人机的倾斜摄影测量技术是近年来发展起来的一项新的测量技术,该项目技术的应用改变了以往航测遥感影像只能从垂直方向拍摄的局限性,通过在同一飞行平台上搭载 5 台传感器,同时从一个垂直、四个倾斜五个不同的角度采集影像,拍摄相片时,同时记录航高,航速,航向和旁向重叠,坐标等参数,然后对倾斜影像进行分析和整理[3,4]。在一个时段,飞机连续拍摄几组影像重叠的照片,同一地物最多能够在 3张相片上被找到,这样通过相同行建筑物结构分析,通过测量距离的测量角度的换算,构建景物的三维实体模型,向用户提供真实直观的实景信息。目前,倾斜摄影测量技术已经应用于实际的生产实践[5],已有大量的数字航测公司通过无人机倾斜摄影技术用来构建三维数字城市模型[6,7]。
美国2001年“9·11事件”发生几个小时后,就利用实景三维建模技术还原了现场情况,而我国最近几年才开始对实景三维建模技术进行研究。2010年,北京天下图首次将实景三维建模技术引入我国,虽然我国起步较晚,但是倾斜摄影进入我国后,得到了快速的发展,在三维数字城市构建中被广泛应用。
随着云计算、物联网、移动互联、大数据、人工智能、社交网络、知识管理、虚拟现实等新兴信息技术在高校中的广泛应用,信息技术与教育教学业务的融合越来越深入,高校信息化由管理信息化发展为教育教学全面信息化,信息技术与教育教学的关系从组合、整合演进到融合创新。智慧校园建设已经成为当前阶段高校信息化发展的必然诉求。学校的校区结构及各建筑物是师生活动的场所,校园的三维数字化平台是智慧校园建设的基础。
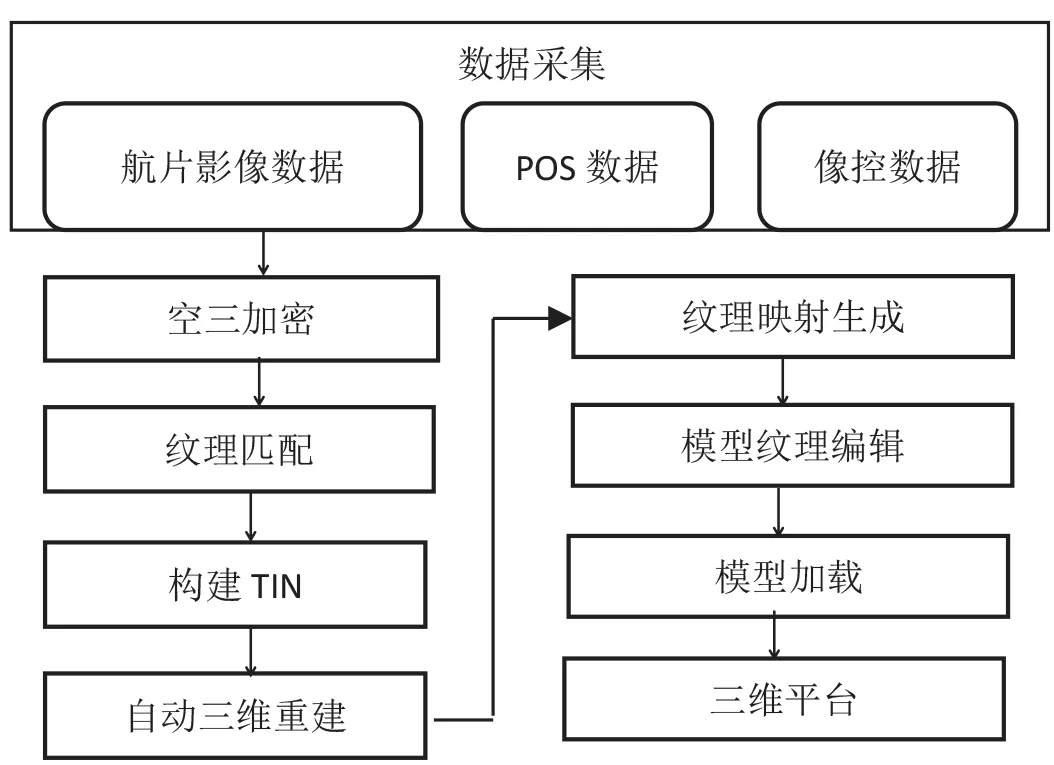
图1 三维实景模型的构建流程图
2 校区三维实景模型的构建方案
通过构建校园三维数字化平台,可以方便学生学习和生活,提高校园安全保障能力和校区突发事件的应急响应能力;通过校区三维数字化展示,可以直观对校区全景浏览,加深对校区印象,提高学校对外展示宣传水平,进一步提升学校的竞争力;在三维实景模型的基础上进行智慧校园的建设,可以使信息系统与实物地理位置结合,真正实现校区各类活动实景再现。本文通过基于无人机的三维建模技术重构校区实景模型,构建方案如图1所示,首先通过无人机航拍的连续图像,实现校区基本数据采集,采集的数据包括影像数据、与影像对应的POS数据以及在校区设定位置上的像控数据。前二者用于构建模型,后者主要用于对模型进行精度校正。然后对获取的航片数据进行空三加密,提取其特征点并进行特征匹配;再通过纹理匹配完成三维基本模型构建;为了进一步提高构建模型的精度和真实感,最后进行纹理映射生成、模型纹理编辑后生成三维实景模型。
3 数据采集
数据采集包括地面像控点采集、倾斜影像采集、POS数据采集。为了提高实景三维模型的空间位置坐标精度,防止模型的扭曲、拉伸,需要在地面添加像控点;然后根据拍摄区形状和大小、建模精度设置拍摄参数,进行航线规划,通过多航线飞行获取各角度的图像。
3.1 地面像控点数据采集
3.1.1 地面像控点的布设
像控点的布点方法有:全野外布点、航线网布点和区域网布点[8,9]。无人机倾斜摄影像控点布置方式主要采用区域网布点,遵循空中三角测量精度准则。从Google earth测量校区约为1km2的四边形区域,如图2所示。

图2 像控点布设分布图
对该区域进行像控点布设,根据以下位置优选原则[10]:选用的像控点应清晰可辨,在航片中可以清晰的看到点位;布设像控点应尽量选择平地,布设点平面的周围2m内尽量不要有超过1m的高程差;飞行区域边沿像控点布设应布设在在飞行区域边沿40m-100m以内,不能在边沿线上布设;像控点应尽量选择在旁向重叠航片(指正摄航片)中线的的附近。
设计布设像控点方式如图2所示,共有8个像控点,依次在图中作标注。
3.1.2 地面像控点测量
像控点的测量一般是通过地面GPS设备得到精确的坐标位置,目前测量精度较高的为实时动态差分设备(RTK),该系统最少由两台设备组成,一台基准站,一台移动站,通过移动站不断与基准站数据解算,获得点位的精确坐标。测量点位时,需要确定RTK设备一直处于固定解状态;架设RTK基准站收到卫星的数量大于15颗;采集每一个像控点的次数应大于2次,最后观察数据,若相差较大,则重新测量;若相差不大,取平均值作为最后结果。
经过测量得到实验数据如表1所示。
3.2 无人机倾斜摄影影像数据采集
采用无人机数据采用时确定拍摄比例为1:200,采用中海达公司的5镜头倾斜摄影相机,该相机参数如下:焦距正摄16mm,其余20 mm;像素为5456×3632,传感器尺寸23.2×15.4 mm2,像元尺寸0.00425 mm,地面分辨率为0.02m。
3.2.1 无人机倾斜摄影参数确定
在外业数据采集前,需要进行设计无人机航线设置,确定航线指标,包括航高,航向重叠率和旁向重叠率。
摄影行高H由下式决定
其中:f为镜头焦距;a为像元尺寸;dG为地面分辨率。
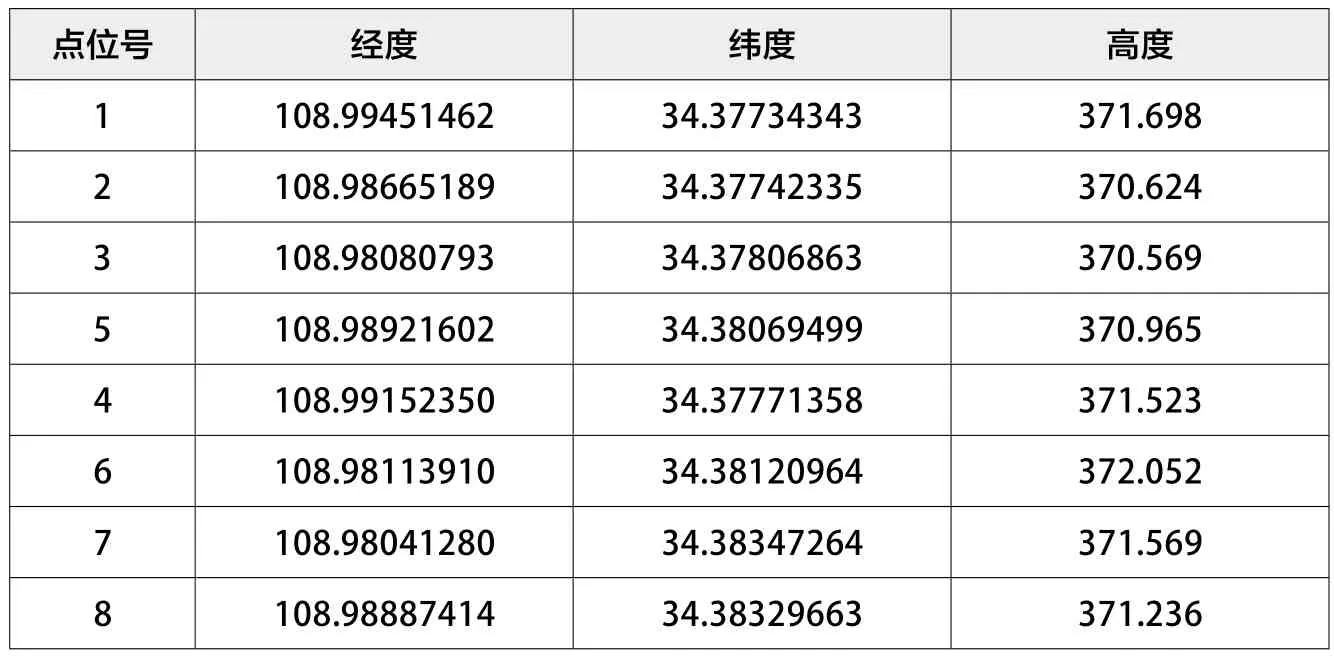
表1 像控点坐标
初步确定航高为75.29m。
重叠率计算需要通过像点位移来确定,以保证图像的清晰性。根据飞机飞行速度、曝光时间和影像地面分辨率利用下面公式可以计算出像点位移量:

式中:δ为像点位移;V为无人机速度km/h;t为相机曝光时间,s。
在无人机速度为36 km/h条件下,可以算出像点位移和地面分辨率、曝光时间的关系如表2所示。
根据摄影测量学标准,像点位移不能大于0.5,地面分辨率为0.02,因而选择曝光时间为1/1000S。
通过上述计算,设置本次数据采集的参数为:航向重叠率:80%,旁向重叠率70%,航高为70m。
3.2.2 无人机航线规划
根据以上计算结果,在无人机地面站软件中规划航线,共39条,如图3所示。

图3 校区航线规划图
3.2.3 外业航飞
外业航飞通过无人机挂载的五镜头相机(包括正射,前视,后视,左视,右视),在一个曝光点获得五个方位的航片, 曝光点如图4所示,当飞机到达飞行位置的同时,飞控会给五个相机触发信号,使五个相机同时触发拍照。
3.3 无人机POS数据获取
无人机航片POS数据包括惯性测量数据(IUM)和动态GPS数据,在倾斜摄影中只需要动态GPS数据。POS数据的获取有多种方式,一种是使用无人机自身IUM与GPS获得,另外一种是外置POS系统。一般来讲,在精度要求不高的小面积倾斜摄影中,无人机自身的POS系统就可以满足要求。在本次试验中采用GPS后差分技术(PPK),即采用的外置GPS系统由一个地面基准站和一个机载移动站组成,当无人机到达预设航点触发相机拍照,相机拍照同时触发机载GPS设备记录曝光点,后期将得到的机载数据与地面基站数据进行处理。

表2 像点位移与曝光时间和地面分辨率的关系
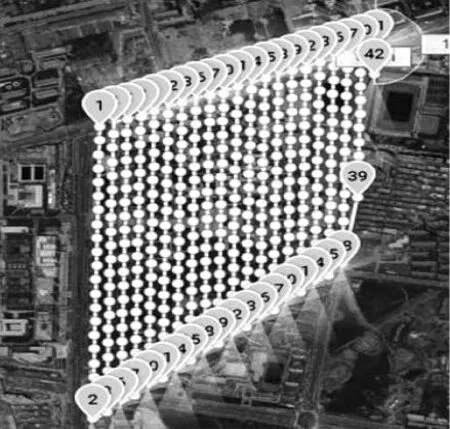
图3 航飞中的相机曝光点
4 数据处理
数据处理包括前期数据检查,照片匀光匀色,照片畸变校正[10],这些工作为ContextCapture Master三维建模做好数据基础。
4.1 航片前期数据处理
在处理照片之前,要对照片进行检查,主要检查的项目有:实际照片数量与理论照片数量相差是否在误差范围内;照片是否有虚焦,色彩不真实现象;POS与照片的数量是否严格一致;照片的质量是否满足要求。
4.2 ContextCapture Master三维建模
ContextCapture Master是美国著名软件公司Bentley研发的一款实景三维建模软件,该软件目前可以做到自动化、高效批量化处理大面积倾斜摄影数据。虽然在建模时会由于特征点匹配不足产生模型漏洞,但是目前对于大面积自动化建模仍然是比较优秀的软件。
应用ContextCapture Master软件建模流程如下。
第1步:航片,POS数据,像控点坐标倒入
首先将以上三种文件倒入对应的文件夹中,将POS数据写入航片中,每个架次的五组航片对应一组POS数据,这样就不需要制作excel表格,制作excel表格费时费力,一旦excel表格出错,原因也很难找出来。因此采用直接写入POS的方法,写POS数据应用到的软件是北京三维远景科技有限公司的产品LocaSpaceViewer。POS写入航片之后,在软件中新建工程,再新建block,将所有航片倒入block中,填写相机传感器尺寸,焦距等数据。
第2步:空三加密
空三加密的过程会对航片进行特征点提取,对提取的特征点再进行同名点匹配,再解算出每张航片的空间位置,以及空间姿态。空三加密完成后我们可以对整个飞行情况进行评估,删除没用的航片,为下一步模型生成打好基础。
第3步:导入像控点
空三加密完成后会计算出每张航片的位置及姿态,这样可以更快的在航片中找到像控点的位置,选择地面像控点的坐标导入,为得到高精度三维模型打好了基础。
第4步:建模并贴图
经过空三加密获得了大量高密度点云数据,软件通过空山加密点计算出不规则三角网TIN,并生成没有贴图的瓦片,通过瓦片的位置从航片中得到贴图纹理,最后输出实景三维模型。
图5 校区实景三维模型

图6 加载后校区三维效果图
4.3 模型的加载
以最新网页语言 HTML5前端框架采用Nodepad++平台对其编译进行模型加载,本案例选用(.b3dm)数据 ,保证大规模倾斜三维模型在 Web 浏览器顺畅浏览。加载效果如图6所示,加载后的模型清晰度好,图像质量大大提升,该模型可作为智慧校园建设的平台。
5 结论
本文提出基于五镜头无人机倾斜摄影的三维建模技术来重构校区实景模型,利用在校区内布置像控点、通过RTK测出像控点的精确坐标的方法,为模型的精度提供保证;利用现有设施和建模要求确定采集时参数设置,然后划分校区地理区域,按参数对无人机进行航线规划,对需要建模的影像数据、POS数据进行采集;应用ContextCapture Master软件以采集后的获取的航片数据进行空三加密,提取其特征点并进行特征匹配,完成三维精确模型的构建;为了进一步提高构建模型的精度和真实感,最后用(.b3dm)数据对模型进行了加载,加载后的模型精度高、清晰度好,可以作为智慧校园建设的三维平台。
[1]王琳,吴正鹏,姜兴钰,陈楚.无人机倾斜摄影技术在三维城市建模中的应用[J].测绘与空间地理信息,2015,38(12):30-32.
[2]张鑫鑫,王冬,赵凤梧.基于A3航空摄影系统和Smart3d软件快速进行实景影像三维模型生产[J].城市勘测,2017(1):76-81.
[3]杨永明. 无人机遥感系统数据获取与处理关键技术研究[D].昆明理工大学,2016.
[4]张骥,高钊,陈容.基于Leica RCD 30倾斜航摄仪和Smart 3D技术快速进行城市三维实景生产[J].测绘技术装备,2014,16(3):61-64.
[5]陈姣. 无人机航摄系统测绘大比例尺地形图应用研究[D].昆明理工大学,2013.[6]李莹,林宗坚,苏国中,杨应.Smart 3D数据的三维模型重建[J].测绘科学,2017,42(9):88-93.
[7]戴竹红,李柳兴,邹发东.基于SMART3D的实景三维建模与应用[J].广西城镇建设,2015(4):113-115.
[8]张海波. DGPS/IMU辅助航空摄影航片处理方法[D].辽宁工程技术大学,2013.[9]杨程.实景三维技术在数字城市建设的应用[J].智能建筑与智慧城市,2018(1):80-81.
[10]赵志刚. 航空摄影测量外业像控点布设的精度分析及应用[D].长安大学,2015.
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
文苑(2018年23期)2018-12-14
电子制作(2018年17期)2018-09-28
校园英语·上旬(2018年8期)2018-09-10
现代装饰(2018年2期)2018-05-22
浙江警察学院学报(2017年3期)2017-08-11