
基于宽窄带功率比值法的GNSS载噪比估计改进方法*
2018-05-28 09:24:04
电讯技术 2018年5期
(重庆邮电大学光 电信息感测与传输技术重庆市重点实验室,重庆 400065)
1 引 言
载噪比C/N0是全球卫星导航系统(Global Navigation Satellite Syste,GNSS)接收机的一个重要控制参量,除了可以利用它检测信号质量好坏来判断卫星是否可用,从而筛选参与定位解算的卫星外,还可以辅助接收机对卫星信号的捕获与跟踪。信号捕获门限与信噪比(Signal-to-Noise Ratio,SNR)有着直接关系,信号跟踪环路的锁定检测和接收机性能的预估也都与载噪比的测定相关[1]。信噪比是信号功率与噪声功率之比,而载噪比是信噪比的一种归一化表现形式[2]。输出的载噪比估计值可以反映该通道跟踪信号的强度,通常情况下,信号的载噪比越高意味着信号强度越高,则将会得到更精确的伪距和载波相位测量精度以及更好的定位精度。
接收机载噪比估计依赖于信号功率估计与噪声功率估计,大部分的估计算法是通过分析I、Q两路累加值的统计特性估计得到的[3-4]。比较常用的载噪比估计方法有平方信噪比方差方法[5]、方差求和法[6]、噪声通道法[7]、宽窄带功率比值法(Narrow to Wide Power Ratio Method,NWPRM)[7-9]等。目前应用最广的是宽窄带功率比值法,它主要是利用不同噪声带宽上的功率差异得到宽带功率和窄带功率并利用两者的比值来计算载噪比估计值C/N0,避免了直接求信号功率和噪声功率的运算。
本文对宽窄带功率比值法进行了详细分析,利用接收机稳定跟踪信号时信号能量主要集中在I支路这一特点,将传统算法的宽带进行了简化得到了一种改进的宽窄带载噪比估计方法,在分别对传统方法和改进后的方法进行了理论推导后,分析了两种算法的性能。
2 载噪比估计基础
2.1 信号模型
当接收机跟踪某个信号时,由该信号通道上I支路和Q支路输出的相干积分值IP(n)和QP(n)的表达式如下[10]:
IP(n)=AD(n)R(τP)sinc(feT)cosφe+nI,
(1)
QP(n)=AD(n)R(τP)sinc(feT)sinφe+nQ。
(2)
式中:A为信号幅值,D(n)是值为±1的数据比特电平值,τP为即时复制C/A码与接收C/A码之间的相位差异,R(τp)代表最大值为1的C/A码自相关函数,fe表示输入信号与复制信号之间的载波频率差异,φe表示输入信号与复制信号之间的载波相位差异,nI和nQ均为均值为零、方差为σ2/2的随机正态噪声。载噪比与信噪比的关系为SNR=C/N0·T[10],T为相干积分时间。
假设码对齐且码相关过程中卫星电文数据D(t)=1,则式(1)和式(2)可简化为
IP(n)=Asinc(feT)cosφe+nI,
(3)
QP(n)=Asinc(feT)sinφe+nQ。
(4)
此时,nI和nQ变为均值为零、方差为1/2的随机正态噪声。
另外由式(3)和式(4)可知,若φe=0,则有[2]
(5)
式中:nI~N(0,σ2/2),nQ~N(0,σ2/2)。
在推导出I、Q两路每毫秒累加值的概率分布特性之后,就可以对载噪比估计方法进行推导。
2.2 宽窄带功率比值法
目前应用的比较典型的载噪比估计算法是宽窄带功率比值法,其基本原理是根据信号加噪声的功率在不同噪声带宽上的差异来得到宽带功率和窄带功率并利用两者的比值最终得到载噪比估计值C/N0。
定义带宽为1/T的宽带功率PWB(k)为[10]
(6)
式(6)中的M代表取Mms的导航数据信号进行相干积分。定义带宽为1/MT的窄带功率PNB(k)为
(7)
接着用对应的宽带功率PWB(k)来对窄带功率PNB(k)进行单位化得到比率值PNW(k)并对K个时刻的PNW(k)做平均得到均值
(8)
由此可求得载噪比C/N0为
(9)
宽窄带功率比值法估计载噪比的具体流程如图1所示。

图1 宽窄带功率比值法估计载噪比的基本流程图Fig.1 The basic flow chart of C/N0 estimation by NWPRM
一般情况下,宽窄带功率比值法进行载噪比估计时,相干积分时间T为0.001 s,M取值为20,K取值为50[10],于是接收机每1 s得到一个载噪比估计值。
3 一种改进的宽窄带功率比值法
由于当接收机稳定地跟踪信号时,信号能量基本集中在I路,因此可以将宽带只采用I路来得到载噪比估计值。具体推导如下:
定义I路信号累加值的二阶矩
(10)
参考概率论知识可知期望和方差的关系[11]如下:
E(X2)=E2(X)+D(X)。
(11)
由式(5)、(11)可得到MI2的均值为
(12)
定义窄带功率PNB(k)为
(13)
由式(11)可得,E(PNB(k))的期望可以表示为

(14)
由式(5)可将式(14)改写为


(15)
因此,PNB(k)的期望为
E(PNB(k))=A2M2+M·σ2。
(16)
(17)
解式(17),可以得到载噪比[2]为
(18)
改进后的算法估计载噪比的基本流程如图2所示。
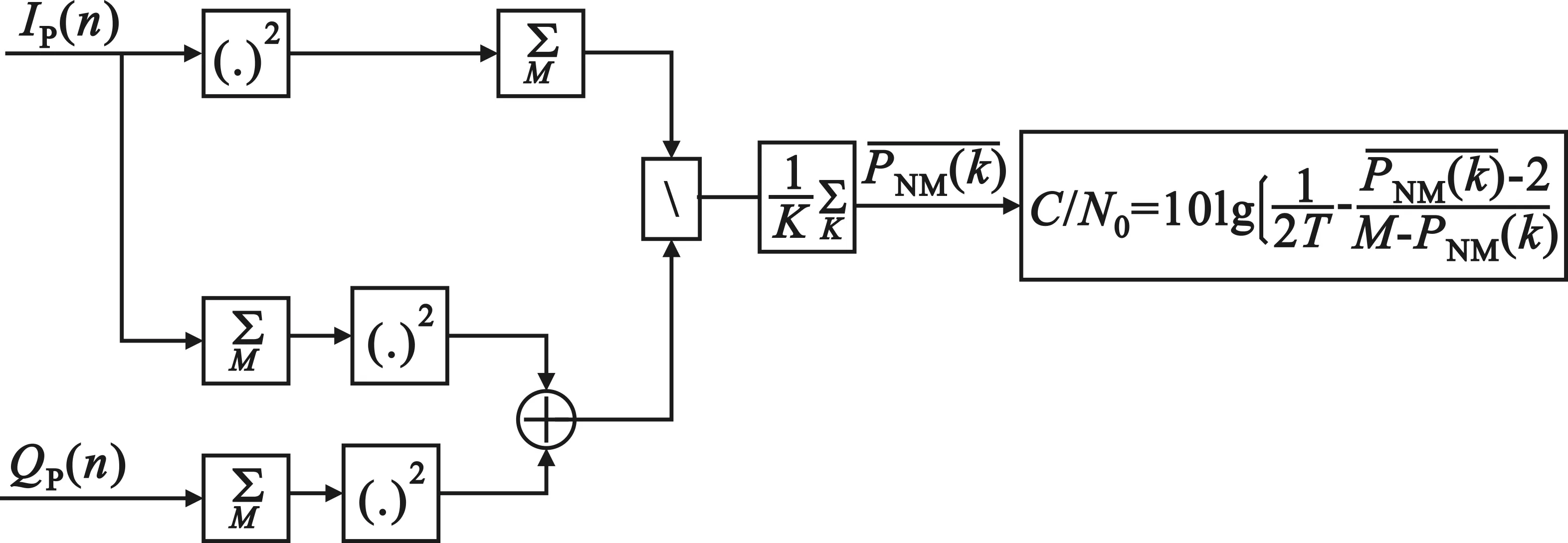
图2 改进后的算法估计载噪比的基本流程图Fig.2 The basic flow chart of C/N0 estimation by improved algorithm
4 性能分析
为了比较改进后的算法与NWPRM的性能,从仿真数据测试、实测数据测试、运算量三个方面对两种算法进行详细的比较分析。
4.1 仿真数据测试
仿真数据采样率为16.368 MHz,系统中频为4.092 MHz,信号功率-140~-120 dBm。两种算法均选取M=20、K=50,即选择相同的数据长度来进行比较分析。比较两种算法的载噪比估计偏差和标准差,得到仿真测试结果如图3和图4所示。图3为两种方法对仿真载噪比的估计偏差比较,可见两种方法对信号强度为-140~-120 dBm的信号估计精度都较高,估计偏差保持在1 dB以内。其中,改进后的方法比原方法的估计精度略高。图4表示两种方法在不同信号强度下的载噪比估计标准差,可以看出宽窄带功率比值法的标准差略小于改进后的,但也只有约0.05 dB的差距,造成的原因可能是改进后的算法省略了Q支路使得算法的稳定性比传统算法稍弱,但这并不影响其在实际中的使用,因为在实际应用中的载噪比的估计过程中这点标准差是被允许的。总的来说,两种方法的估计标准差相当。
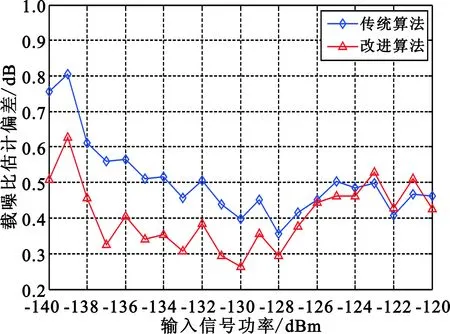
图3 仿真数据载噪比估计偏差Fig.3 The C/N0 estimation deviation of simulated data

图4 不同信号强度下的估计标准差Fig.4 The C/N0 estimation standard deviation under different signal strength
4.2 模拟数据测试
采用Spirent GSS9000信号模拟器对这两种载噪比估计方法进行测试。接收机的中心频率为1 572.42 MHz,数字基带中频为4.092 MHz,采样频率为16.368 MHz。GSS9000信号模拟器产生信号功率为-138 dBm、-135 dBm、-134 dBm、-133 dBm共4组数据。对两种方法都选取M=20、K=50进行仿真,测试比较两种算法的估计偏差和标准差,得到的结果如图5和图6所示。
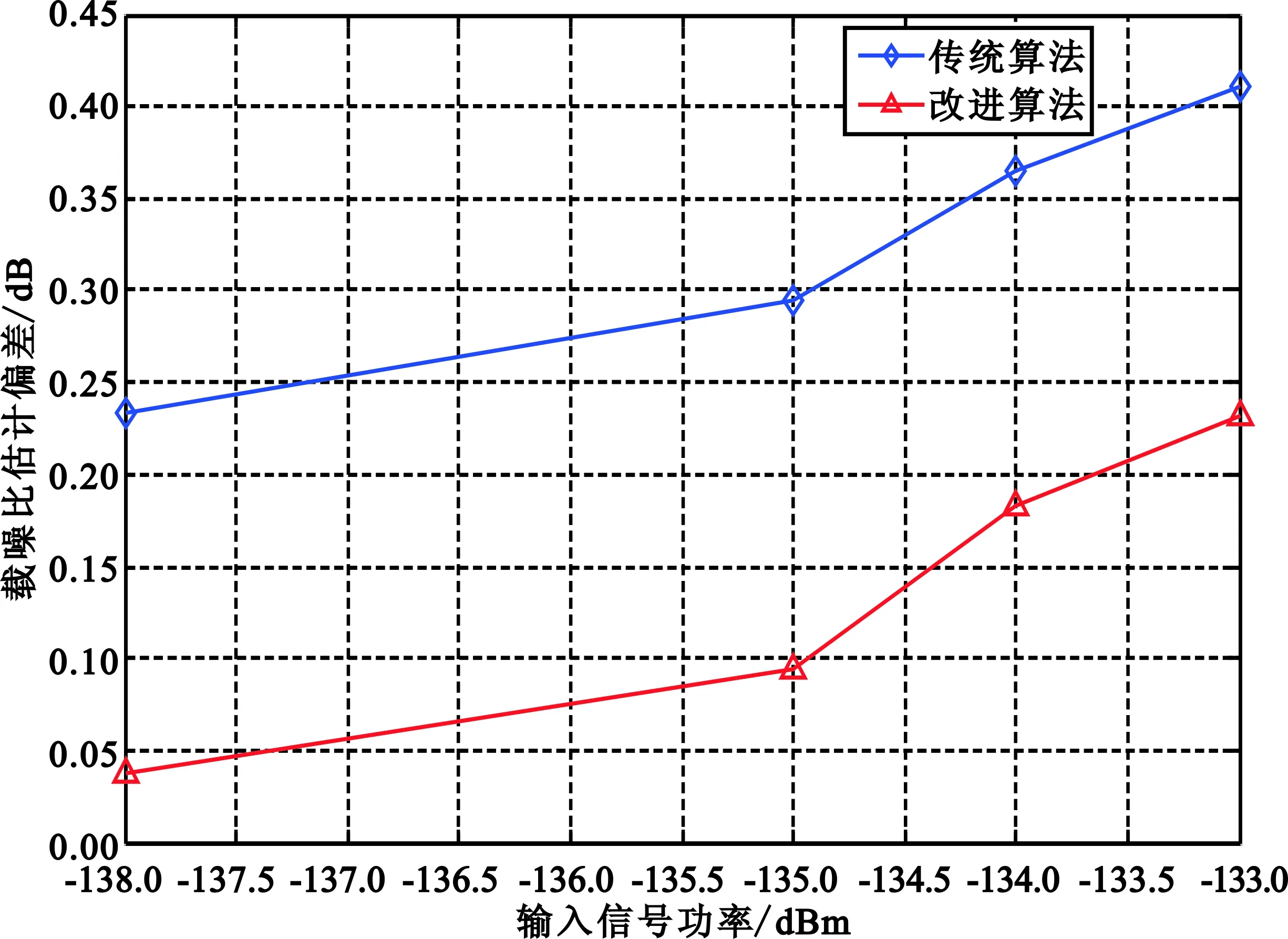
图5 GSS9000输出信号的载噪比估计偏差Fig.5 The C/N0 estimation deviation of GSS9000 output signal

图6 GSS9000输出信号的载噪比估计标准差Fig.6 The C/N0 estimation standard deviation of GSS9000 output signal
如图5所示,两种算法的载噪比估计准确度都较高,且改进后的算法比原来的精度略高,偏差减小0.2 dB左右。由图6可知,两种算法的估计标准差基本相当,其中宽窄带功率比值法的估计标准差略小于改进后的,这表明实测数据测试与仿真数据测试结果相一致。
4.3 算法复杂度比较
由于改进后的算法在原有的宽窄带功率比值法的基础上,其宽带功率仅取了I路信号,减少了对应的乘法和加法次数。下面对两种算法的算法复杂度进行精确的比较分析。两种方法都做20 ms相干积分,对50次比值的估计结果取平均,即M=20、K=50,具体结果如表1。

表1 两种算法复杂度比较Tab.1 The complexity comparison between two algorithms
由表1可知,改进后的算法相比于原有的宽窄带功率比值法,加法次数和乘法次数分别减少了1 000次左右。可见,改进后算法的复杂度约为传统算法的60%,相比于原有的宽窄带功率比值法得到了大幅度降低。
5 K值的讨论
一般情况下,接收机对载噪比的估计是1 s得到一个载噪比估计值,即采用M=20、K=50。对改进后的载噪比估计方法通过仿真分析比较不同K值对载噪比估计标准差的影响,具体方案为K取10、25、50、100、200,分别得到相同个数的载噪比估计值,然后分别计算不同K值情况下这些载噪比估计值的估计标准差。仿真分析如图7所示。

图7 不同K值时的载噪比估计标准差Fig.7 The C/N0 estimation standard deviation of different K
由图7可知,当K=10时,即200 ms输出一个结果,估计值标准差最大,表明此时载噪比估计值的波动显著;当K=25时,估计标准差相对10时有所降低,但估计值仍有较大的波动;当K=50时,估计标准差进一步降低且维持在0.3以内,表明此时得到的估计值较平稳;当K值继续增大时,估计标准差并没有明显的减小。由于K值越大意味着计算C/N0所用的平均时间越长,这会使得C/N0的估计产生时延,导致C/N0值不能实时地反映当前载噪比的真实情况。综上所述,K值一般取50,既能得到比较平稳的估计值又能保证时延较短。
6 结束语
本文在分析了典型的载噪比估计算法宽窄带功率比值法后对其进行了改进,通过仿真数据与实测数据测试对改进后的算法与原算法进行了详细的对比分析。测试结果表明,改进后的算法与传统算法性能基本相当,估计偏差都在1 dB以内,估计标准差均维持在0.3以内,但相比NWPRM在算法复杂度方面加法和乘法次数都减少了1 000次左右,是传统算法的60%左右,降低了载噪比估计过程的算法复杂度。综上所述,改进后的方法与传统算法性能基本相当,但在省略Q支路后对于信号较强的情况下能较大地降低实现复杂度。此外,对K值的讨论分析得出,当K值取50时能够达到估计标准差与输出时延的一个平衡状态。在实际的接收机应用中,通常根据信号强度来选择相应的K值,如何自适应地根据信号强度来调整K值是接下来需要研究的内容。
:
[1] 袁建国,欧松林.GPS接收机并行捕获算法的研究[J].重庆邮电大学学报(自然科学版),2013,25(4):470-474.
YUAN Jianguo,OU Songlin.Study on parallel acquisition algorithm for GPS receiver[J].Journal of Chongqing University of Posts and Telecommunications(Natural Science Edition),2013,25(4):470-474.(in Chinese)
[2] 巴晓辉,刘海洋,郑睿,等.一种有效的GNSS接收机载噪比估计方法[J].武汉大学学报(信息科学版),2011,36(4):457-460.
BA Xiaohui,LIU Haiyang,ZHENG Rui,et al.An effective carrier-to-noise ratio estimation method for GNSS receiver[J].Geomatics and Information Science of Wuhan University,2011,36(4):457-460.(in Chinese)
[3] BRAASCH M S,VAN DIERENDONCK A J.GPS receiver architectures and measurements[J].Proceedings of the IEEE,1999,87(1):48-64.
[4] DANIELE B,CIRO G,GIANMARCO B.Asynchronous pseudolite navigation using C/N0 measurements[J].Journal of Navigation,2016,69(3):639-658.
[5] FALLETTI E,PINI M.Low complexity carrier-to-noise ratio estimators for GNSS digital receivers[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(1):420-437.
[6] LI L,WAYN C J,WU J,et al.Improvement to multi-resolution collective detection in GNSS receivers[J].Journal of Navigation,2014,67(2):277-293.
[7] BHUIYAN M Z H,SÖDERHOLM S,THOMBRE S,et al.Performance evaluation of carrier-to-noise density ratio estimation techniques for BeiDou Bl signal[C]//Proceedings of 2015 IEEE Ubiquitous Positioning Indoor Navigation & Location Based Services.Corpus Christ,TX,USA:IEEE,2015:19-25.
[8] SHARAWI M S,AKOS D,ALOI D N.GPS C/N0 estimation in the presence of interference and limited quantization levels[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(1):227-238.
[9] 傅金琳,赵子阳,李醒飞.一种改进的功率比值法载噪比估算算法[J].中国惯性技术学报,2015,23(5):642-647.
FU Jinlin,ZHAO Ziyang,LI Xingfei.Improved power ratio method of carrier-to-noise ratio estimation algorithm[J].Journal of Chinese Inertial Technology,2015,23(5):642-647.(in Chinese)
[10] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2015.
[11] 盛骤,谢式千,潘承毅.概率论与数理统计[M].4版.北京:高等教育出版社,2015.
猜你喜欢
导航定位学报(2022年2期)2022-04-11 03:23:04
当代医药论丛(2021年3期)2021-03-17 07:03:12
中学生数理化·高一版(2019年12期)2019-12-31 06:52:24
当代石油石化(2018年1期)2018-08-10 06:50:54
中国钢铁业(2018年6期)2018-07-26 06:55:00
舰船电子工程(2018年1期)2018-02-07 05:45:15
通信学报(2016年8期)2016-11-24 07:29:11
赤峰学院学报·自然科学版(2015年15期)2015-03-21 00:30:56
中国钢铁业(2014年7期)2014-01-26 05:18:12
医学理论与实践(2012年4期)2012-12-09 07:23:25
