现代有轨电车行车调度系统设计的探讨和实践
2018-05-28 02:19黄育斌谭万忠
现代城市轨道交通 2018年5期
黄育斌,谭万忠,钟 杰
(中国铁道科学研究院集团有限公司深圳研究设计院,广东深圳 518000)
0 引言
日前,国家对申报地铁城市的人口、GDP 和财政状况等“门槛”做出调整,地铁建设规划审批更加严格,同时鼓励发展轻轨、有轨电车等高架或地面敷设的城市轨道交通。有轨电车的运能介于地铁和公交车二者之间,是一种中低运量的交通工具。相比于地铁,现代有轨电车建设成本较低,每公里建设成本不到地铁的 1/4,且具有安全舒适、建设周期短、绿色环保等特点,是城市中一种有效的交通补充形式,将会是未来城市轨道交通的一个重点发展方向[1-2]。
1 问题的提出
综合运营效率和建设成本等因素,现代有轨电车通过调整优化原有机动车道、绿化带和人行道布设于路中,可在轨行区路段享有专用路权,在平交路口与社会机动车辆及行人共享路权[3-4]。如果在经过市政平交路口时无法保障“电车优先”,现代有轨电车的速度、可达性和安全性均会受到影响,则无法发挥对其他交通工具的优势。因此,现代有轨电车需采用与地铁不同的行车调度模式,适应轨行区和过平交路口时的不同工况。以某市现代有轨电车为例,探讨现代有轨电车行车调度系统的设计方案和实施过程。
2 设计方案
有轨电车的行车调度设计总体方案根据铁路信号系统中的“故障-安全”原则和过市政平交路口时的“电车优先”原则组织搭建,主要包括路口控制子系统、正线道岔控制子系统、车载子系统和车辆段联锁系统等。各个子系统互通互联,实现不同工况下的协调,达到既定行车目标(图 1)。
轨行区路段行车时,有轨电车在车载子系统的辅助下,按规定的安全间隔和运营间隔要求实现人工驾驶运行。通过道岔区时,行车调度系统对比既定运行计划计算得出有轨电车的进路信息,并通过正线道岔控制子系统提前办理有轨电车前方进路,使有轨电车快速通过道岔区[5]。当有轨电车接近平交路口时,有轨电车车载子系统通过车地间通信系统自动发送路口优先请求(或人工请求),车地间通信系统,包括计轴和信标等轨旁设备,可自动监测有轨电车靠近,路口控制子系统根据路口当前路况对有轨电车路口通过策略进行实时优化,司机根据路口信号机指示安全驶过平交路口,实现有轨电车有条件优先通过。车辆段联锁系统则主要是对有轨电车出入车辆段和车辆段内调车作业进行集中控制。
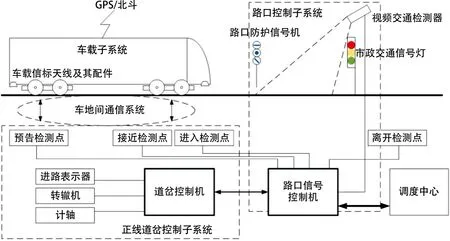
图1 行车调度系统设计总体方案
2.1 正线道岔控制子系统
道岔控制子系统将正线几个主要道岔区段分由多个联锁处理子系统控制,主要包括终端信号设备和核心联锁处理单元。
轨旁的终端信号设备主要有信号机、转辙机、计轴、信标等,设置于正线轨旁,包括轨行绿化区内和路口混行水泥路面。其选用型号和安装方式均区别于传统地铁,需适应有轨电车实际应用工况。信标和转辙机等设备安装于轨面下,位置较低,需考虑设备排水问题。因此,信标接线盒子和转辙机地箱均需设排水孔,同时在道床设计阶段应预留排水槽。转辙机选用专用埋入式,机械、液压和电气控制模块全部置于专用高强度不锈钢材质地箱内,保证安装于路口水泥路面混行区域时可承载社会车辆的碾压。计轴设备在不影响检测精度的前提下选用不切轨安装方式,保证了钢轨强度。
核心联锁处理单元设置于轨旁的道岔控制箱内,负责全线的联锁逻辑运算、处理和执行。终端信号设备通过直连或者继电器接口与核心联锁处理单元相连接。核心联锁处理单元接收信号设备(计轴、信标等)发送的信号设备状态信息后,对其进行内部逻辑判断和联锁逻辑运算,根据规定的联锁条件和规定的时序,形成列车进路控制命令并返回控制相应信号设备(信号机、转辙机等)实行控制动作。
2.2 路口控制子系统
路口控制子系统使用专用路口模块对有轨电车与社会交通车辆进行同步检测。有轨电车侧通过沿线设置的“预告”、“接近”、“进入”和“离开”等不同检测点检测有轨电车的运行状态;市政交通侧通过视频交通检测器等设备监测路口红灯排队及绿灯放行情况。有轨电车路口专用信号和市政道路交通信号分离独立运行,同时进行交互协同控制。在道路交通近饱和或过饱和时,系统不盲目追求有轨电车的绝对优先权,而是通过均衡各相位时间,保障道路交通主流向的通行效率,最终实现有轨电车有条件信号优先和兼顾社会车辆畅通[6]。
有轨电车首先驶过“预告”检测点时,系统根据过路口预告请求信号和车辆排队及通行状态综合判断相应的优先响应等级,对相位时间做预调整和预分配。在驶过“接近”检测点时,系统再次对调整后的相位时间进行修正,实现最终的有轨电车通行信息指令控制,采用“绿灯延长”(图 2)、“红灯缩短”、“插入相位”等基本响应策略,对路口各相位持续时间进行调整,确保有轨电车实现不停车通过或最短时间等待[7-8]。
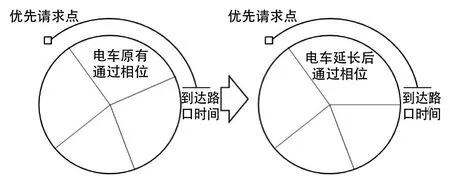
图2 “绿灯延长”策略
当相邻路口间距离较短时,可将上游路口的“进入”点复用为下游路口的“预告”点,在有轨电车进入上游路口时即对下游路口的相位时间进行预调整。当路口上游设有电车停靠站,且停靠站与路口间距小于“预告”点布置距离时,可将有轨电车出站请求检测点复用为下游路口的“接近”点。检测点的复用,既节省了信号设备的成本,又简化了控制系统。
每一处路口轨行区内都设有与道岔区信号机相区别的路口专用市政道路交通信号机。系统响应路口优先请求命令,并将优先请求结果显示在市政道路交通信号机上。有轨电车司机在确定路口无路人或社会车辆误闯之后,决定有轨电车是否通过前方路口。在有轨电车初期投入运营阶段,运营单位需根据实际情况,增派人员在主要路口进行辅助性指导,规范社会车辆和路人在有轨电车区域的行动。
2.3 车载子系统
车载子系统主要提供有轨电车测速定位等功能。车载子系统通过接收 GPS 系统卫星信息或北斗系统信息,实现有轨电车的定位和测速;同时通过速度传感器信息和轨旁信标进行重定位以保证定位精度。车载子系统综合利用这 3 种方式对有轨电车进行测速定位,将有轨电车定位速度状态信息与调度中心发送的有轨电车运行计划信息对比计算后,通过车地间通信系统将有轨电车进路命令发送至轨旁道岔控制子系统,提前办理有轨电车前方进路。
正常工况下,车载子系统主动发送有轨电车进路命令,实现自动办理进路。在自动进路失效的情况下,司机通过车载子系统提示手动办理进路。
2.4 车辆段联锁子系统
车辆段联锁子系统主要包括 1 套热冗余的“2 乘 2取 2”联锁系统和计轴、转辙机和信号机等终端联锁设备。车辆段联锁子系统通过继电接口电路对各终端联锁设备执行联锁控制,采集设备状态及故障信息,对有轨电车进出车辆段以及段内调车作业进行集中控制。
由于出入场线不具备停放多列车的条件,有轨电车正线与车辆段之间进行转线作业时,车辆段联锁子系统需与正线道岔控制子系统建立联系接口电路。具体为:有轨电车入场需检查入场信号机的开放;有轨电车出场不需要检查正线出场信号机的开放,期间由司机目视行车,人工保证安全。
2.5 特殊工况联锁接口方案
除正常工况外,当遇到某些特殊工况时,采取专用行车策略,确保行车安全并兼顾通行效率。当平交路口上游或者下游存在道岔联锁区时,道岔控制子系统在进行联锁逻辑运算时需考虑路口控制子系统状态信息,系统需同时采集路口车流状态和相关联锁区进路信号,以控制行车。
路口下游存在道岔联锁区时,只有确认下游进路信号开放,才能允许有轨电车通过路口,否则会造成有轨电车停在路口区域,造成社会道路阻塞,严重影响行车安全(图 3)。

图3 道路阻塞
路口上游存在道岔联锁区时,只有确认路口允许电车优先通过时,才能允许有轨电车进入道岔联锁区并马上通过平交路口,否则会造成列车占用检测设备,导致其他进路无法办理,影响运营效率(图 4)。
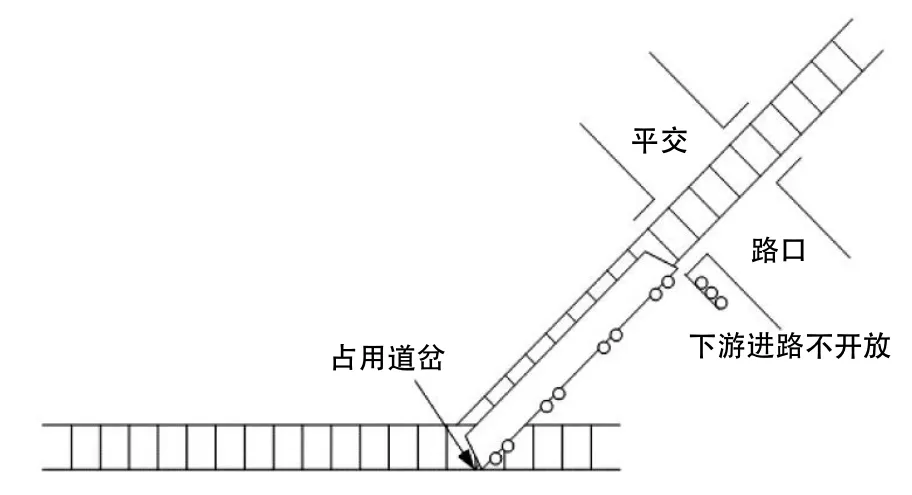
图4 道岔区间占用
3 结语
现代有轨电车的建设有其自身特殊性,行车调度策略更是区别于传统地铁。为解决这些问题,建设单位、设计单位、监理单位和工程建设等相关单位在设计、施工、安装和调试阶段需综合考虑“故障-安全”原则和有轨电车过平交路口的特殊性等因素,设置路口控制子系统、正线道岔控制子系统、车载子系统和车辆段联锁子系统等,并针对特殊工况采取专用行车策略,顺利完成行车调度系统的设计施工,达到既定行车组织目标。该行车调度系统的设计方案已经在实践中得到了验证,并可为将来同类系统提供经验参考。
[1]施路,崔异. 现代有轨电车在国内外的发展经验启示[J]. 现代城市轨道交通,2014(4):69-74,78.
[2]钱广民,温兆鹏. 现代有轨电车系统发展展望与思考[J]. 现代城市轨道交通,2016(5):74-77.
[3]丁强. 现代有轨电车交通概述[J]. 都市快轨交通,2013,26(6):107-111.
[4]钟吉林,王长林. 有轨电车道口信号优先设计[J]. 铁路计算机应用,2014,23(9):48-50,62.
[5]徐鼎,张静. 现代有轨电车行车控制方案设计[J]. 都市快轨交通,2013,26(6):167-170.
[6]李凯,毛励良,张会,等. 现代有轨电车交叉口信号配时方案研究[J]. 都市快轨交通,2013,26(2):104-107.
[7]王舒祺. 现代有轨电车交叉路口优先控制管理方法研究综述[J]. 城市轨道交通研究,2014(6):17-22.
[8]蔡国涛. 信号优先和车地通信系统在现代有轨电车中的应用[J]. 城市轨道交通研究,2016(增1):39-41.
猜你喜欢
铁道通信信号(2020年12期)2020-03-29
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2018年9期)2018-11-10
铁道通信信号(2018年7期)2018-08-29
铁道通信信号(2018年6期)2018-08-29
铁道通信信号(2016年7期)2016-06-06
铁道通信信号(2016年5期)2016-06-01
铁道通信信号(2016年4期)2016-06-01
铁道通信信号(2016年3期)2016-06-01