车载高精度两轴随动转台的设计与控制
2018-05-26 01:50:04俞茂超石永安过武英贾爱莲
长春理工大学学报(自然科学版) 2018年2期
俞茂超,石永安,过武英,贾爱莲
(西安黄河机电有限公司设计研究所,西安 710043)
车载两轴随动转台主要运用于车载式雷达系统的运动平台,是车载雷达的重要组成部分,对雷达作用距离扩远有着重要的意义。
本文从机械结构及驱动控制两个方面介绍了车载高精度两轴随动转台的设计与实现。该随动转台采用力矩电机直接驱动控制方式,通过全数字驱动控制电路,实现了车载两个自由度转动系统的设计和控制,达到了很高的定位精度,具有大功率、高精度、重量轻、响应快等特点。
1 两轴随动转台技术要求
(1)两轴随动转台运行范围
方位角工作范围:0°~360°;
俯仰角工作范围:-5°~90°。
通过将碎石、石屑、粉煤灰同水泥一起掺和确定合适的配比,接着搅拌均匀,由此来达到高黏结强度桩形成的目的,同时在桩与桩之间的土和褥垫层共同形成复合地基,能够有效避免软土地基的下陷和沉降,增加地基整体承载力,这就是粉煤灰碎石桩法。该法的优势在于强度较高,流动性好,同时施工简单,所需材料较少,能够最大限度地减少对环境的影响。不过,该法的缺陷在于施工过程中容易出现爆管问题,主要原因在于粉煤灰碎石桩技术的提升速度较慢,很难快速地将混凝土彻底排出,这样就造成管道堵塞。
(2)两轴随动转台运转速度范围
方位角:0.1°/s~16°/s;
老师们通常的教学方法是抓核心词语“不屈不挠”,串讲课文,通过品析关键词句感受海伦的坚强。江苏省特级教师严伯春则站在小传的高度,尝试新的突破。严老师分两个课时,引导学生研究、学习“人物小传”写作的四个特点。
在方位随动系统中,Ki=17221,τi=95.5。
(3)位置指示精度
两轴系均要求:≤2″。
52例急性阑尾炎患者中,CT诊断结果显示单纯性阑尾炎24例,坏疽穿孔性阑尾炎5例,化脓性阑尾炎16例,阑尾周围脓肿5例,除单纯性阑尾炎外其他均为阳性,单纯性阑尾炎包括22例阳性,2例阴性。
(4)位置控制精度
两轴系均要求:静态误差≤5″;
样品处理包括从不同的样品中提取蛋白质、蛋白质前处理和蛋白质的酶解。根据蛋白质样品的性质,也可以减少或省略样品处理中蛋白质提取及前处理步骤。 二维聚丙烯酰胺凝胶电泳和一维聚丙烯酰胺凝胶电泳是常用的蛋白质前处理方法。二维聚丙烯酰胺凝胶电泳是先根据蛋白质等电点将蛋白质分离,然后根据蛋白质的分子量进行二次分离,进而选取电泳胶片上的蛋白质点进行质谱分析。一维聚丙烯酰胺凝胶电泳是根据蛋白质的分子量将蛋白质进行分离,将电泳胶条的目标胶条酶解后进行质谱分析,或将胶条平均切割成几段,将不同条段进行酶解及质谱分析。如果样品中蛋白质种类不复杂,也可将蛋白质直接进行酶解测定。
跟踪误差≤20″(低速或慢速时)。
2 总体结构设计
2.1 设计思路
如图2所示,俯仰随动系统主要由俯仰控制驱动组合1、俯仰力矩电机2、俯仰支撑轴承3、俯仰旋转轴4、光电码盘支撑轴5、俯仰光电码盘6、U型架7、天线8和水冷系统9组成。
2.2 方位随动系统结构设计
车载高精度两轴随动转台由方位随动系统和俯仰随动系统组成,长2100mm,宽970mm,高1715mm,总重约700kg。
如图1所示,方位随动系统主要由方位控制驱动组合1、300V电源组合2、锁紧机构3、方位力矩电机4、方位支撑轴承5、方位光电码盘6、汇流环7、天线座壳体8和方位旋转轴9组成。
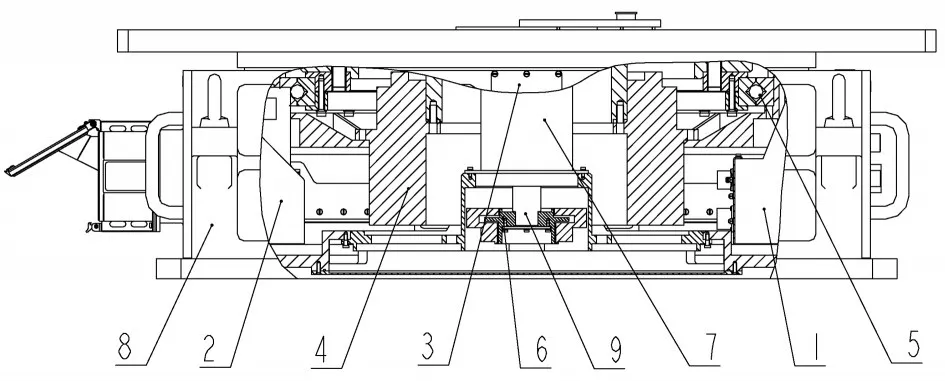
图1 方位随动系统结构布局图
首先对天线座壳体、U型架的受力情况进行了分析,根据以往产品的经验初步确定了两个铸件的壁厚及加强筋位置;然后通过调整壁厚和加强筋位置,采用有限元分析铸件的刚度,寻找最佳壁厚参数和加强筋位置,在保证刚度的前提下,使得重量最轻。
方位控制驱动组合、300V电源组合分别通过导轨安装于天线座壳体的内腔,对称布置。方位随动系统设有两个锁紧机构,运输状态或方位随动系统停止工作时,可将方位角锁定。
2.3 领俯仰随动系统结构设计
车载两轴随动转台不仅仅是一个高精度的两轴随动转台,作为车载雷达的一部分,它还负责雷达总站电源的控制、传输及各个系统电源的电压、电流监测等功能,因此需要兼顾总站300V电源组合、汇流环、水冷系统等系统的综合设计,对重量的要求也十分严格。在结构设计上从系统精度、刚度、稳定性等几个方面进行了分析计算,在满足工作要求的情况下,优化系统刚度、系统精度、系统的谐振设计。由于该转台的精度直接影响整个武器系统的攻击效果,采用随动力矩电机直驱控制方式,该方式无传动装置的传动误差和回程误差,具有良好的低速和高速性能,动态特性优秀,控制精度和指示精度满足总体设计需求。
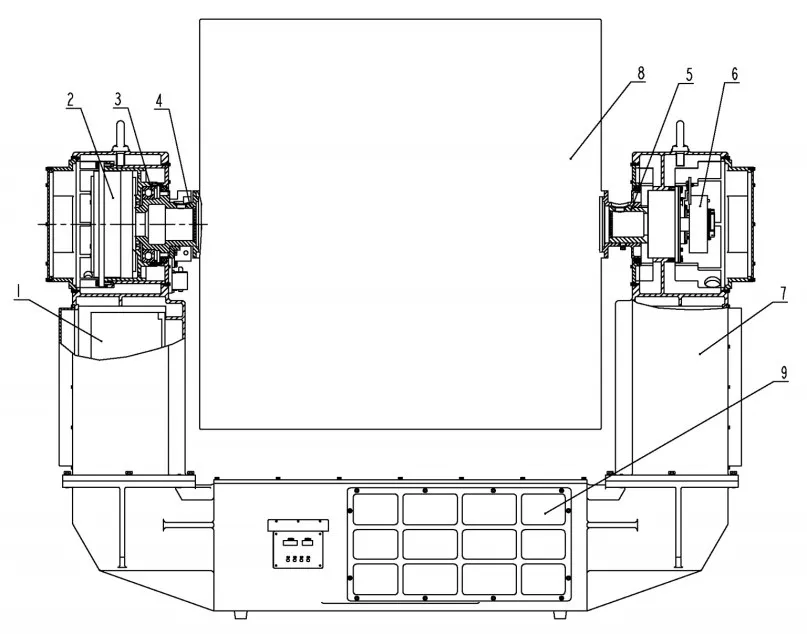
图2 俯仰随动系统结构布局图
考虑电机自然散热、结构形式和技术成熟度,方位电机和俯仰电机均采用由906厂生产的直流有刷力矩电机。
为便于安装,俯仰随动系统与负载对接装配时,光电码盘支撑轴可沿轴向移动。为防止电气失控,保证设备安全,负载运转至极限位置时,设有电气止挡与机械止挡,电气止挡先于机械止挡。
水冷系统安装在U型架的底座内,其循环水管经过U型架的侧臂腔,通过球轴承旋转接头分别与俯仰旋转轴和光电码盘支撑轴连接。俯仰旋转轴、光电码盘支撑轴均为空心密封轴,分别设有进水管接口和出水管接口,雷达水冷系统循环水从中穿过,省去了大量管路,降低了整体重量。
其中,Yi是因变量,Xi是自变量,εθi是残差项,满足Qθ(εθi|Xi)=0的假设条件。βθ是-分位数上的回归系数。
方位随动系统天线座壳体和俯仰随动系统U型架采用一体式铸造,有效地简化了设计,减少装配环节,同时在一定程度上提高了系统的装配精度,降低零件的加工成本。
根据以往经验,旅游业是奥运效应受益最大的产业之一[4],2008年,北京奥运会的成功举办为北京带来了604万的外国游客,当年旅游创汇达到60亿美元。2014年,索契冬奥会使当地旅游收入提高约50%,可见,奥运期间猛增的游客数量将为北京市带来巨大的经济效益。
2.4 电机的选择
通过对两轴随动转台三维实体模型的分析,俯仰随动系统U型架所受的最大力F为:Fg=2000N;Ff=1000N。其中Fg为所受重力,Ff为横向力。对U型架按所受最大力F进行有限元分析。经过网格划分和求解计算可见最大位移为3.5×10-4mm,发生在U型架左端支撑孔边缘,如图3所示。按最大位移为3.5×10-4mm进行计算,此处转轴直径为336mm,换算成角度为0.43″。该位移对轴系精度不产生影响,满足设计要求。
Pierro 'Little Touch of Christmas' Cabernet Sauvignon Merlot L.T.Cf 2014
在俯仰随动系统载荷计算中,总的负载力矩由风载荷力矩、重力矩和惯性力矩组成,总和为17.3kgf·m,则俯仰电机在加速阶段连续输出力矩约为:173N·m。
俯仰随动系统采用U型架结构,俯仰力矩电机驱动俯仰旋转轴转动,带动负载俯仰运转。负载的运动通过弹性连接片传递给高精度光电码盘,无多余的过渡环节,保证了俯仰角传递精度。
2.5 轴系精度设计
两轴随动转台轴系设计是保证转台精度的关键,合理的设计可以减少结构本身带来的误差,有力于提高系统的精度。以下以俯仰随动系统的U型架为例进行分析。
在方位随动系统载荷计算中,总的负载力矩由风载荷力矩、摩擦力矩和惯性力矩组成,总和为36.3kgf·m,则方位电机在加速阶段连续输出力矩约为:363N·m。
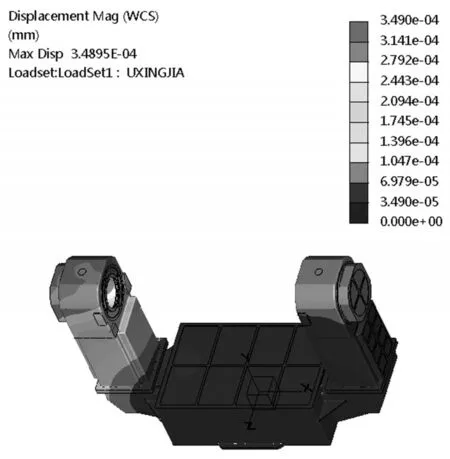
图3 U型架受力位移图
方位随动系统的天线座壳体、俯仰随动系统的U型架的结构设计直接影响整个转台的刚度及重量,该两大结构件采用薄壁、三维加强筋铸件。为使转台具有较高的刚度,同时具有较低的重量,设计时对天线座壳体、U型架的结构设计进行了优化。
方位随动系统结构设计上,采用对称结构布局,壳体、转盘采用薄壁、三维加强筋铸件,有效地简化了设计,减少冗余的装配环节。方位支撑轴承采用高精度交叉滚柱轴环,通过高精度汇流环和弹性连接片连接高精度光电码盘,使座架尺寸得到有效地控制。方位力矩电机直接驱动方位旋转轴旋转,将运动直接传递给方位光电码盘,没有多余的过度环节,保证了方位角传递精度。
3 随动控制系统
3.1 系统构成及控制策略
方位随动系统和俯仰随动系统在控制原理上基本相同,下面以方位随动系统为主进行介绍。
方位随动系统主要由方位控制驱动组合、方位力矩电机、光电码盘等组成,其中方位控制驱动组合主要由控制模块、电源执勤模块、电机驱动器等组成。
方位随动系统的控制原理框图如图4所示。随动系统以跟踪周期T0为工作周期,通过RS422串口接收目标处理/控制计算机发出的控制指令,通过RS422串口采集光电码盘位置信息,形成位置环闭合控制回路。方位控制模块按照复合控制算法生成位置环控制误差,经FPGA形成占空比可变的速度控制信号,输入到电机驱动器。电机驱动器采集光电码盘的增量光电码盘信号,作为速度环反馈输入;同时在电机驱动器内部形成电流环控制回路。
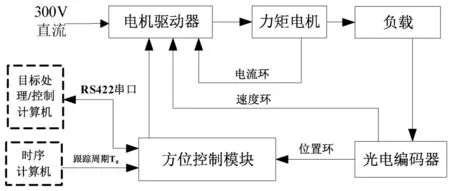
图4 方位随动系统控制原理框图
由此可见,方位随动系统具有电流环、速度环和位置环三环闭合控制回路,其中速度环和电流环由电机驱动器按照预先设置的PI整定参数进行闭合回路控制,控制电机按照给定的方式平稳、可靠的运行。
方位随动系统采用复合控制策略,系统控制结构图如图5所示。采用输入信号微分前馈开环控制与闭环控制相结合的复合控制方案,使系统最大限度地发挥开环控制的快速性和闭环控制精度高的优点,有利于提高系统的频带宽度,特别是平坦段的频带宽度。既提高了系统精度又改善了位置环响应速度,较好地满足了转台高性能指标的要求。
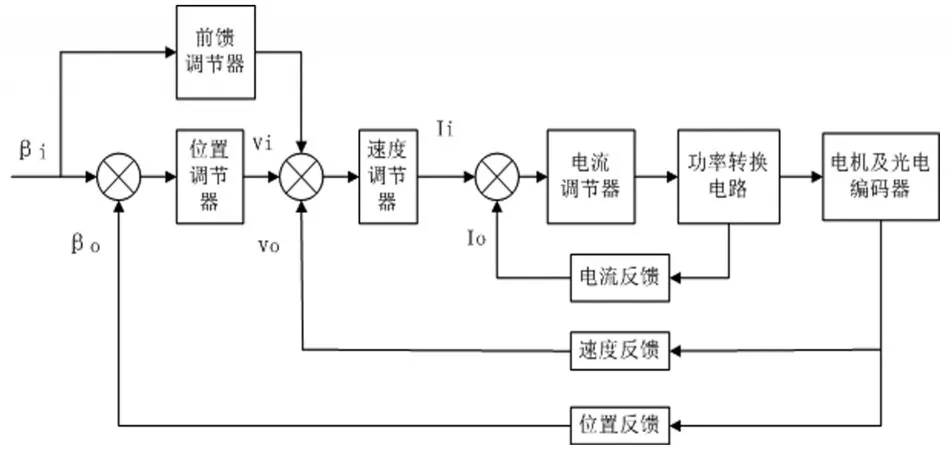
图5 方位随动系统控制结构框图
整个控制系统设计按照由内环到外环的设计方法。在内环路设计中,先设计电流调节器,然后把整个电流环看作是转速调节系统中的一个环节,再设计转速调节器。电流和速度调节器均采用PI控制,校正方式采用串联校正。
(1)电流调节器设计
采用PI控制将雷达伺服系统校正成为Ⅰ型系统,使系统电流在负载扰动时不出现太大的超调量,控制器传递函数为:

其中,Ki为电流控制器的比例系数,τi为电流控制器的超前时间常数。
按照BOPPPS模式组织课堂教学,需要以多样的方式引入教学内容,明确学习目标,改进互动环节,设计合理的课前、课后测试,课后总结根据知识点有的放矢,这些手段自提高学生的学习积极性方面大有帮助。
俯仰角:0.1°/s~15°/s。
野生动物保护工作,宣传系于一半。为进一步提升行动效果,确定了普法与执法相结合、宣传与巡逻排查相结合的工作方针。一方面对全县重点林区、重点饭店餐馆、市场、码头、重点人员进行拉网式排查,彻底清除非法猎捕、交易、食用野生鸟类的违法行为,另一方面巡逻排查的过程中坚持对餐馆饭店、村民进行宣传教育,重点对非法猎捕野生鸟类的刑事责任进行了普法宣传,同时联合县电视台对查处的违法行为及时曝光,扩大宣传效应。
(2)速度调节器设计
采用PI控制,将速度回路校正成Ⅱ型系统,调节器的传递函数为:

其中,Kn为转速控制器的比例系数,τn为转速控制器的超前时间常数。
在方位随动系统中,Kn=20186,τn=2.21。
(3)位置环复合控制设计
雷达位置回路要求快速响应、稳定性好、同时无超调或超调尽可能小,可以采用单独的比例控制进行调节,位置环复合控制采用前馈加反馈的控制方式,传递函数为:

式中,Δβ为误差控制量,βSTn为本拍位置控制数据,βTn为本拍方位码盘值,Ka为控制增益,βST(n-1)为上拍位置控制数据,KP为前馈增益。
SF6断路器在电力系统中应用的主要优势体现在:第一,SF6断路器的操作机构由优质的弹簧机构制成,因而其电源容量较小、动作较为迅速,从而有助于断路器的日常维护和检修。第二,断路器的电流压力较大,仅需较短的灭弧时间,因而具有节约空间、减小体积的优势。第三,检修周期较长,能够进行多次断路。SF6断路器的检修周期通常为10年,而且,整个检修过程所需的人员数量较少,一般进行2至3个人即能够完成整个检修工作。第四,绝缘支柱数量较少,内部零件组织数量较少,且组织结构较为简单。
在方位随动系统中,KP=6.98×10-9,Ka=10.95。
3.2 控制模块设计
控制模块是随动控制系统的核心,原理框图如图6所示。该模块主要由DSP(TMS320F2812PGFA TI公司)、FPGA(EP1C6T144I7 ALTERA公司)、高速串口通讯(TL16C754BFN TI公司)等组成。用于实现和目标处理/控制计算机的数据交换,完成光电码盘的数据采集,计算方位随动误差,向电机驱动器输出脉宽调制信号,完成方位随动系统位置环闭合控制。
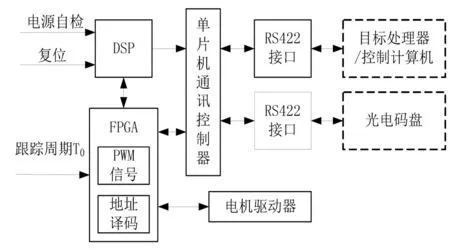
图6 控制模块原理框图
DSP和FPGA作为主控电路,由FPGA产生所有内部所需时序脉冲、地址译码。DSP中断INT0负责接收目标处理/控制计算机通过RS422串口发送的随动系统方位控制数据,DSP中断INT1负责接收光电码盘数据。在每一个跟踪同步脉冲周期里,DSP读取随动系统方位控制数据和方位光电码盘数据,根据αβ滤波算法进行前馈控制计算,形成方位误差数据,再FPGA对误差数据进行D/T转换,形成PWM脉宽调制信号,输出给电机驱动器,实现随动系统位置环闭合控制。
3.3 光电码盘设计
对于高精度的随动控制系统,测角元件的性能及精度会直接影响整个系统的性能及精度。本系统的测角元件采用绝对式高精度光电码盘和增量式光电码盘相结合的方式,其中绝对式光电码盘采用12V供电,分辨率:21位(二进制),测角精度:σ≤2″(均方根),数据最小间隔:≤1ms;增量式光电码盘过码盘细分技术,产生增量码盘信号,分辨率2097152线。随动系统均以增量式光电码盘作为速度反馈信号,取消了电机自带的速度传感器,使得随动系统实现了全数字化控制,大幅提升了随动系统的控制精度和稳定性。
随着水产养殖集约化程度的不断提高,养殖动物病害频发,渔用杀虫药物的投入使用也较为频繁,有些养殖户为了追求疗效,盲目加大药物使用浓度,从而导致水产养殖动物死亡或中毒的药害事故时有发生,因此,在养殖水体使用杀虫药时应根据实际情况科学把握药物的安全使用浓度。
绝对式光电码盘采用空心轴形式,如图7所示,码盘的壳体通过弹性连接片与方位随动系统的天线座壳体(俯仰随动系统的U型架)连接,光电码盘转轴直接与方位随动系统转轴(俯仰随动系统转轴)连接。弹性连接片有效地减小了光电码盘安装的偏心误差,保证了光电码盘的传递精度。
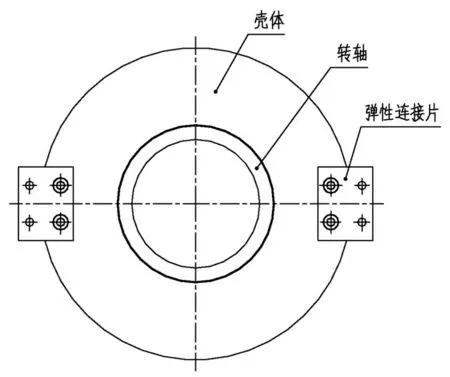
图7 光电码盘外形图
4 测试结果
4.1 速度环测试
方位随动系统电机驱动器速度环结构框图见图8。
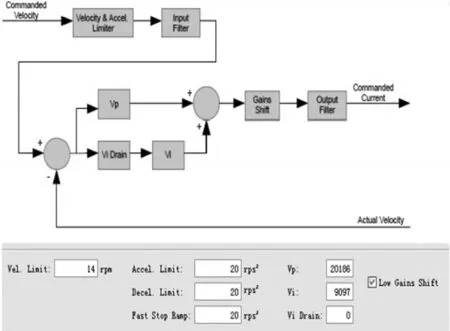
图8 方位随动系统速度环结构框图
速度环采用自适应PI控制算法,其中比例增益VP越高,刚度越大,一般情况下,负载惯量越大,VP设定值越大,在保证系统不发生振荡的条件下,尽量应设置较大的值;积分时间常数VI的设置可提高速度的稳定性,一般情况下,负载惯量越大,VI设定值越大,在保证系统不发生振荡的条件下,尽量应设置较小的值。
方位电机驱动器速度环调节参数:VP=20186,VI=9097,速度环矩形波响应测试曲线如图9所示。
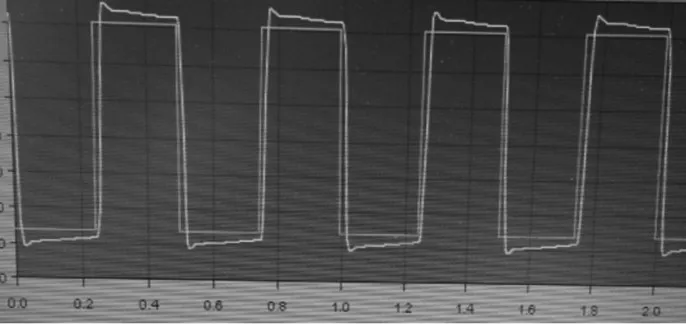
图9 速度环矩形波响应测试曲线
可以看到,方位随动系统速度环响应迅速,控制带宽大,系统的鲁棒性良好。俯仰随动系统速度环控制效果与此类似,这里就不赘述。
4.2 位置环测试
经测试,方位随动系统静态误差≤5″,动态误差≤10″,俯仰随动系统静态误差≤2″,动态误差≤5″,满足高精度转台的要求;其他各项指标均满足设计任务书的要求。
“怎么不行?我不是吃软饭的,正想租个大一点的地方,你家后院可以用上。今后,我打算养花,拿到街上去卖,给儿子攒点学费。”
5 结论
本文结合了车载两轴随动转台的研制,从结构设计、随动控制等方面进行了分析、设计。采用力矩电机直驱控制方式,通过全数字驱动控制电路和高精度光电码盘,达到了较高的定位精度,满足高精度随动控制要求。
自2015年1月起, 《生活用纸》由半月刊变更为月刊,全年12期,大16开,全彩版印刷,每月10日出版,刊号为CN11-4571/TS,ISSN1009-9069。变更刊期后,栏目设计和内容进一步提升,并加强杂志数字化进程,向从业人员提供专业性、时效性更强的信息。生活用纸专业委员会会员单位且交纳会费的免费送2本/每期,其他读者全年可随时订阅。零售价:18元/本,国内定价200元/全年 (平信),320元/全年 (快递)。国外及港台地区定价700元 (120美金)/全年 (含邮费,EMS除外)
目前该两轴随动转台已运用于某雷达产品,完成了外场试验,运行状态良好。对比同类产品,该两轴随动转台在达到国内同等随动技术指标的情况下,整机重量至少减轻30%,具有广阔的市场前景
参考文献
[1] 崔广志.电动三轴仿真转台控制系统研究[D].哈尔滨:哈尔滨工业大学,2007.
[2] 刘春芳.液压三轴仿真转台低速性能及其控制策略的研究[D].哈尔滨:哈尔滨工业大学,2003.
[3] 付永领,陈宝琦.两轴电动转台的设计与控制[J].自动化与仪器仪表,2013(4):91-94.
[4] 胡祐德,曾乐生,马东升.伺服系统原理与设计[M].北京:北京理工大学出版社,1993.
[5] 谢剑英,贾青.微型计算机控制技术[M].北京:国防工业出版社,2008.
猜你喜欢
机械设计与制造(2022年4期)2022-04-28 04:32:10
经济技术协作信息(2020年27期)2020-02-28 21:03:27
科学与财富(2019年18期)2019-07-10 04:15:51
科技视界(2019年11期)2019-06-20 01:22:08
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41
电子机械工程(2015年2期)2015-09-15 15:41:55
新媒体研究(2014年21期)2014-12-16 20:45:26