
Simulink和GUIDE结合实现ABS仿真
2018-05-26 07:31欧光李小静刘祥斌
汽车实用技术 2018年8期
欧光,李小静,刘祥斌
(1.青岛世亚精密管件有限公司,山东 青岛 266426;2.青岛理工大学,山东 青岛 266520)
引言
1 ABS控制模型
对制动系统采用计算机技术建模并进行动态仿真,已成为当今汽车制动系统设计、生产中的一个重要发展趋势。Matlab/Simulink就是一个集建模、仿真和分析为一体的软件包,直观简单、功能强大等优点使它在许多领域得到了广泛应用。此外,Matlab还提供了一套可视化的图形用户界面GUIDE(Graph User Interface Development Environment),用户无须进入Simulink工作环境就能很容易直接的操控模型参数和显示仿真结果。
该研究中以单轮制动系统为例,充分利用 Simulink和GUIDE各自强大的功能实现单轮系统动态仿真,数据输入方便,仿真图形一目了然。
1.1 数学模型
在对单轮汽车制动防抱死系统(ABS)进行 PID控制时,首先必须建立其数学模型,并假设:1)车轮承受载荷始终不变,即Fz为常数;2)空气阻力和滚动阻力忽略不计,即Fw=Ff=0。简化后的单轮制动力学模型如图1所示。
其中单轮质量为m,车轮滚动半径为Rr,车轮角速度为w,车轮速度为vw,实际车速所对应的车轮角速度ww=vw/Rr,车轮转动惯量为Iw,地面制动力为Fxb,车轮制动力矩为Tb,滑移率为s,则系统的运动方程为:

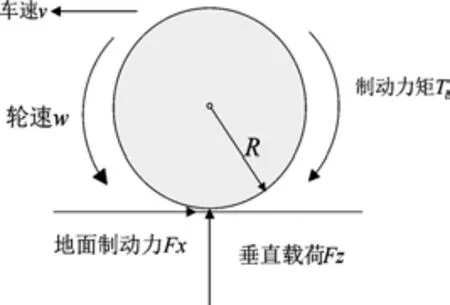
图1 单轮制动力学模型Fig.1 Single-wheel system dynamics model
1.2 PID控制模型
PID控制是根据目标值r(t)与实际输出值y(t)构成控制误差e(t),e(t)=r(t)-y(t),即PID的控制规律表示为:

仿真中,以滑移率s作为控制目标,设滑移率目标值为s0,则控制误差为e=s0-s,因此应用PID的控制规律可表示为:

所以ABS控制器原理就是根据ABS动态系统最终确定出KP、KI、KD的值,使车轮的实际滑移率以最快的方式接近目标滑移率s0。
2 Matlab/Simulink模型仿真
在Matlab/Simulink下建立ABS单轮PID控制模型,文件名为simulate,如图2所示。该模型中,目标滑移率s0为输入参数,实际滑移率s为输出参数,将s0-s输入到PID模块中,并通过路面附着系数和车速的相关计算对其进行控制,使车辆获得最佳的制动效能,缩短制动距离。

图2 ABS仿真系统Fig.2 ABS simulation system
仿真所用参数:车轮质量m=50kg,车轮转动惯量Iw=5kg.m2,车轮半径Rr=0.5m,制动初速度v0=25m/s,其中最佳滑移率s0=0.2,峰值附着系数uh=1,制动抱死时的附着系数ug=0.7,确定PID调节的一组最佳参数为KP=100,KI=0.01,KD=4。
3 利用GUIDE实现仿真参数的输入
在 MATLAB的命令窗口输入"guide"命令,即可进入MATLAB的图形用户界面开发环境,选择新建一个空白图形用户界面,然后用鼠标将所需要的控件拖动到编辑区进行编辑和布局,如图3所示。
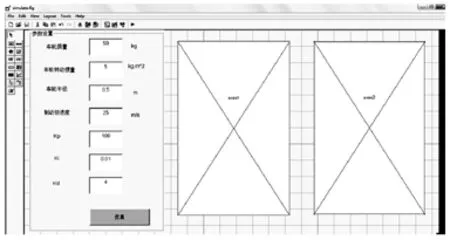
图3 GUIDE布局图Fig.3 GUIDE interface layout
编写代码
右击仿真按钮,在view callbacks后的子栏目中选中call back,即可调出按钮的回调函数,在后面添加代码如下:
m=str2num(get(handles.mass_edit,'String'));%获取质量,因为获取的string是一个字符串,需要使用str2num将其转换为数值
Iw=str2num(get(handles.Iw_edit,'String'));%获取转动惯量
Rr=str2num(get(handles.Rr_edit,'String'));%获取车轮半径R0=str2num(get(handles.v_edit,'String'));% 获取制动时初速度
KP=str2num(get(handles.Kp_edit,'String'));%获取积分系数
KI=str2num(get(handles.KI_edit,'String'));%获取比例系数
KD=str2num(get(handles.KD_edit,'String'));%获取微分系数
options =simset('SrcWorkspace','current');%设置Simulink从当前工作空间运行
sim('simulate',[],options);%仿真模型
%绘制图形
axes(handles.axes1);%将 axes1设置为当前坐标系,便于绘制滑移率曲线
plot(tout,slp);% 绘制滑移率曲线
xlabel('Time(sec)');
ylabel('Relative Slip');
Title('Slip');
axes(handles.axes2);% 将axes2设置为当前坐标系,便于绘制实际车轮角速速和实际车速对应的角速度曲线
plot(tout,yout);% yout模块save format为array
xlabel('Time(sec)');
ylabel('speed(rad/sec)');
Title('Vehicle speed and wheel speed');
点击仿真按钮,获得的车轮滑移率和车速曲线如图3所示,数据输入方便,人机交互性较好。
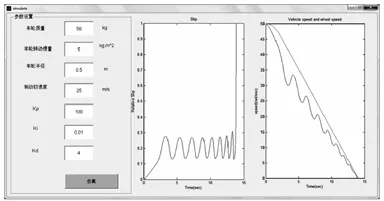
图4 ABS的仿真结果图Fig.4 Simulation results With ABS
注意:所建的.Fig文件必须和.mdl文件必须在同一目录下,最好放在同一个文件夹,因为通过edit编辑框中得到的参数是字符型的,所以必须进行字符型和数值型转化(str2num()),否则会出错。
4 结论
PID控制有效地稳定车轮滑移率在目标值附近,获得了较理想的制动力,较好地改善了汽车制动时的制动效能与方向的稳定性。利用Simulink和GUIDE相结合,充分发挥了二者的优点,人机交互性好,数据输入方便、仿真图形清晰。
参考文献
[1] 喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.
[2] 冯鉴,郭世伟.基于 Simulink的机械系统可视化建模仿真分析[J].煤矿机械, 2002(6) .
[3] 施阳.MATLAB语言精要及动态仿真工具 Simulink [M].西安:西北工业大学出版社,1999.
[4] 夏玮.控制系统仿真与实例详解[M].北京:人民邮电出版,2008.
[5] 黄全安,于良耀,吴凯辉,张永辉. ABS控制器开发装置系统与设计[J].电子产品世界. 2007(07) .
[6] 孙兵凡,高津利. 汽车 ABS动态性能试验台的设计[J].科技资讯.2009(12) .
[7] 董良.汽车ABS台架检测理论与技术研究[D].长安大学 2005.
[8] 张为,丁能根,余贵珍,王伟达,徐向阳. 汽车 ABS电子控制单元综合性能测试试验台[J].农业机械学报. 2009(09) .
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
数学大王·低年级(2021年2期)2021-02-21
环球慈善(2019年6期)2019-09-25
汽车维修与保养(2019年1期)2019-05-05
汽车观察(2019年2期)2019-03-15
汽车电器(2018年12期)2019-01-04
小猕猴智力画刊(2018年7期)2018-08-08
汽车维护与修理(2018年1期)2018-04-04
