
基于模糊PID的电动汽车用永磁同步电机矢量控制仿真研究
2018-05-26 07:31袁亚登孟辉磊冯乾隆刘新亮
汽车实用技术 2018年8期
袁亚登,孟辉磊,冯乾隆,刘新亮
(长安大学汽车学院,陕西 西安 710064)
前言
近几年,随着环境污染的加重以及能源危机的出现,发展电动汽车成为了汽车工业的转型方向。因此,对电动汽车驱动控制系统研究具有重大的理论和实际意义。永磁同步电机具有结构简单、功率密度高、制造成本低、过载能力强,低损耗、快响应等优点,在新能源汽车等领域得到了广泛的应用。目前存在许多永磁同步电机的控制算法,有PID控制、BP控制等,PID控制策略作为传统控制领域最具代表性的一种控制策略,因其结构简单、控制精度高、控制性能稳定等优点,在各领域内得到了应用[1]。而对PMSM伺服控制系统,具有非线性的特性,特别是新能源汽车工况复杂,电机启动频繁,运行环境多变,传统的固定增益的PID控制器是一种线性控制策略,无法很好地满足的永磁同步电机高精度、快响应的控制要求,因此应选取满足其特点的控制策略。
目前,人们采用较多的是PID控制与其他控制策略结合,形成智能的复合控制策略,实现了对增益参数的智能校正,使电机伺服系统的鲁棒性得到增强,从而获得较好的控制效果,使电动汽车的稳定响应特性大大加强。模糊控制是一种典型的智能控制方法,对于参数的非线性变化有着较强的自适应性。他的控制并不依赖于被控对象,同时也具有较高的控制精度本文对 PMSM 采取空间矢量的控制策略以及模糊控制与传统PID控制相结合的控制算法,通过模糊控制对传统PID控制的参数进行自整定,并采用MATLAB 分别构建传统PID 控制模型与模糊PID闭环模型,通过对比两种控制模式下永磁体同步电机的仿真结果,可知模糊PID控制模式下的永磁同步电机的性能得到了提升[2]。为实际控制系统的设计和实现提供了理论基础和参考。
1 永磁同步电机d-q轴数学模型
在建立坐标轴数学模型前,先做以下假设:①磁路为线性,忽略铁心饱和;②忽略涡流和磁滞损耗;③磁场近似呈正弦分布,忽略边端效应;④气隙分布均匀,磁回路与转子位置无关,即各相绕组的电感与转子的位置无关;⑤三相线圈绕组完全对称,且各个参数均相同[3]。根据上述假设,以及永磁同步电机的物理模型,选取wm和iq(wm为转子机械角速度)为状态变量,并且采用id=0(iq,id分别为q,d轴电流)的矢量控制策略,这样就得到简化的三相永磁同步电机的动态数学模型如式(1)所示。

式中:P为微分算子;iq为q轴电流;wm为转子机械角速度;R为定子电阻;Lq为电机q轴电感;φf为永磁体磁链;pn为电机极对数;B为摩擦系数;J为折算到电机主轴上的等效转动惯量;uq为q轴电压;TL为折算到电机主轴上的等效负载转矩。因此,进一步得到电机简化模型的结构,如图1所示。

图1 电机简化模型结构图
2 PMSM矢量控制系统
在分析永磁同步电机d-q轴数学模型的基础上,采用矢量控制策略,建立PMSM矢量控制系统如图2所示。其中,SVPWM 为空间矢量脉宽调制。iq为转矩电流、id=0为实际励磁电流,该控制系统包含1个速度外环和2个电流内环,电流环采用传统的PID控制方式,为了增强系统的鲁棒性及抗干扰能力,速度环则采用基于模糊PID 的控制器。从图中可以看出,速度环经过模糊自整定的PID控制器进入电流环,电流环通过对直轴电流id和交轴电流iq的解耦控制,实现了电流分量的单独控制,并最终实现转矩控制的目的。

图2 PMSM矢量控制系统
3 模糊PID控制器参数自整定
3.1 模糊PID控制器的基本原理
由于常规的PID控制器不具有在线调节参数的功能,无法满足控制器参数在线自整定的要求。为了提高转速外环的性能,本文将常规控制器与模糊PID控制理论相结合,将不同时刻输出转速与给定转速的误差e及误差变化率ec为输入变量,通过模糊处理器处理后,产生修正量△Kp、△Ki、△Kd通过式(2)对PID 的比例、积分、微分系数进行修正,实时调节PID参数Kp,Ki,Kd,以适应不同时刻的控制需求,其原理如图4所示。
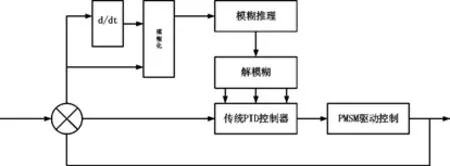
图3 模糊PID控制器原理图

其中Kp0,Ki0,Kd0为最初调整好的PID控制器参数。
3.2 输入参数的模糊化及模糊集合的建立
设控制器的输入量为x,范围为,将该取值范围称为物理论域[4]。为了控制器设计以及后期修改的方便,通常将物理论域量化为离散论域进行处理。如何选择模糊控制器的输入变量的量化因子和输出控制量的比例因子非常重要。现将输入误差e和误差变化率ec以及输出量△Kp、△Ki、△Kd,都定义在离散论域(-3,3)上,则实际输入值x与离散论域值b之间的换算关系可通过式(3)得出。

其中k为量化因子,这里k的取值为:

如果b不为整数,则按四舍五入取整,然后便可以将离散论域模糊化,将离散论域的每个值设置模糊集合,各模糊集合可设置为正大(PB)、正中(PM)、正小(PS)、零(ZE)、负小(NS)、负中(NM)、负大(NB)。设各输入输出均服从三角形隶属度函数曲线,如图4所示。

图4 三角形隶属度函数曲线图
3.3 模糊控制规则的建立
在实际控制中,为了保证不同的偏差e和偏差变化率ec,系统会有较好的性能,需要根据一定的规则来调整PID的三个参数,基本规则如下:
(1)当e很大时,系统应取较大的比例系数Kp和较小的Kd加快系统的响应。
(2)当e中等大时,此时会有两种情况出现:①若e和ec同号,被控量朝着偏离给定量的方向变化,为了使系统响应具有较小的超调,Kp和Kd应取得大一些,Ki应取得适当大;②若e和ec异号,被控量朝着接近给定值的方向变化,此时应逐渐减小Kp,Ki和Kd。

表1 △Kp参数的模糊规则表

表2 △Ki参数的模糊规则表

表3 △Kd参数的模糊规则表
(3)当e较小时,为了使系统有良好的稳态性能,此时应适当弱化比例和微分的作用。并加强积分的作用,可以将Ki设为最大值。
根据上述规则,并进行大量的实验调试后,可以得到调整量△Kp,△Ki和△Kd的控制规则表,分别如表 1、表 2、表3所示。
3.4 模糊推理与输出变量的解模糊化
根据量化后的e和ec,得到相应的模糊变量[5]。再利用面积中心法则解模糊运算得到相应的PID的修正量△Kp、△Ki和△Kd,再根据式(2)计算出不同时刻系统需要的 PID参数需求,进而使被控制的 PMSM 具有更好的动态与静态性能[6]。
根据以上分析,在 MATLAB/Simulink仿真模型中,利用fuzzylogic工具箱建立模糊控制器如下图所示。

图5 模糊控制器设计图
利用建好的模糊控制器,在 MATLAB/Simulink中建立模糊PID控制器,具体结构图如图6所示。

图6 模糊PID控制器模型
4 系统仿真及结果分析
4.1 仿真模型的建立
为了检验设计的合理性,根据建立的模糊PID控制器模型,在 MATLAB/Simulink环境下建立永磁同步电机空间矢量控制系统仿真模型如图7所示。其中A、B、C分别为永磁同步电机的电源接口,g为逆变器信号控制端,m为电机的转速转矩等信号的输出。ia,ib,

图7 永磁同步电机空间矢量控制系统仿真图
ic分别为永磁同步电机的定子电流[7]。
4.2 参数的设定

图8 突加负载时转速仿真实验图
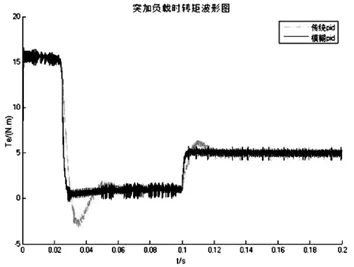
图9 突加负载时转距仿真实验图
系统中所用的电机额定功率P=10kW,额定转矩T=50N.m,定子电阻R=0.22Ω,永磁体磁链,定子轴电感,定子转动惯量J=0.006,电机极对数Pn=2,采样周期TS=0.0000002s,逆变器直流母线电压 Ud=380V,仿真时间设定为 0.2s,最大仿真步长设置为0.000001s,负载转矩TL在0.1s时从1N·m突变到额定转矩5N·m。得到电机转速、转矩与传统PID控制对比如图7、图8所示。
对比图8、图9可知,与传统PID相比,空载启动时,模糊PID控制的调整时间从0.022s降低到0.018s,并且转速无超调,转矩几乎无脉动,突加负载时,模糊PID控制的调整时间更短,转速无超调且转矩脉动很快衰减。
5 结论
本文针对永磁同步电机,提出了模糊控制与PID控制相结合的控制算法,并对其采用空间矢量控制策略分别建立了传统PID和模糊PID的空间矢量的仿真模型,并对永磁同步电机突加负载时的响应特性进行了仿真研究,实验结果表明,对于永磁同步电机,与PID控制相比,模糊自整定PID控制启动平稳、无太大的超调,有快的响应特性,在突加负载时运行较平稳,几乎没有波动,鲁棒性较强。表明基于模糊PID控制的永磁同步电机的矢量控制具有很好的动态特性。论文的研究为实际纯电动汽车与电机驱动控制系统的分析与设计提供了新的思路,对我国电动汽车及驱动控制系统的开发具有很好的参考价值。
参考文献
[1] 齐亮.基于滑模变结构方法的永磁同步电机控制问题研究及应用[D].上海:华东理工学,2013.
[2] 姚振明,胡霞.基于MATLAB的永磁体同步电机模糊PID控制仿真[J].安徽理工大学学报,2016(6).
[3] 袁登科,徐延东,李秀涛.永磁同步电机变频调速系统及其控制[M].机械工业出版社,2015:21-33.
[4] 刘杰,李允工,刘宇等.智能控制与 MATLAB 实用技术[M].科学出版社,2016:34-45.
[5] 李爱平,邓海洋,徐立云等基于模糊的 PMSM 控制仿真研究[J].中国工程机械学报,2013(11).
[6] M.Abroshan,J.Milimonfared, and et al.An Optimal Control for Saturated Interior Permanent Magnet Linear Synchronous Motors Incorporating Field Weakening [C], 13th Power Electronics and Motion Control Conference, EPE-PEMC 008:1117-1122.
[7] 鲍建成.永磁同步电机PID参数优化研究[J].计算机仿真,2012(04).
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
计算机仿真(2022年2期)2022-03-15
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
计算机应用与软件(2021年3期)2021-03-16
成都信息工程大学学报(2021年6期)2021-02-12
