
同轴并联式混合动力客车动力系统仿真研究
2018-05-26 07:31欧鹏飞冯乾隆张洋森
汽车实用技术 2018年8期
欧鹏飞,冯乾隆,张洋森
(长安大学汽车学院,陕西 西安 710064)
前言
同轴并联式混合动力汽车将电机轴作为传动轴的一部分,既可以施加电动机的转矩,又可以传递发动机的转矩,结构简单,易于实现[1-3]。由于混合动力客车控制策略难以设计,同时控制策略参数的优化往往需要大量的实车试验来完成,给车辆的开发带来了极大的成本。设计与实车运行状况相符的动力系统仿真模型可以实现对控制策略的验证以及动力系统匹配优化的功能,优化设计流程,缩减设计周期,对车辆动力系统的开发具有一定的意义。
本文基于逻辑门控制提出了一种应用于同轴并联式混合动力客车的控制策略,并通过仿真分析验证本文设计的控制策略的有效性。
1 同轴并联式HEV控制策略
同轴并联式 HEV控制策略在驱动情况下,低速时以纯电动驱动车辆,速度达到逻辑门限值 20km/h后发动机开始工作,电机辅助提供剩余转矩或者吸收发动机发出的多余转矩给电池充电,从而使发动机工作在最佳工作区间,同时发挥电动机低速高扭的特性。同轴并联式 HEV 控制策略:根据加速踏板信号来判断当前车辆工作在驱动状态还是制动减速状态,将驱动转矩或制动转矩根据当前系统的状态分配给发动机、电动机、发电机以及机械制动,各动力部件的输出转矩改变车辆状态,如图1所示。

图1 控制策略流程图
1.1 驱动转矩分配规则
根据车辆状态、电池状态以及整车需求转矩的不同,可将驱动转矩的分配规则分成以下六种情况讨论:
(1)若V<20km/h且SOC>40%,为纯电动模式,发动机需求转矩T*ICE=0,电动机需求转矩等于车辆行驶的需求转矩即T*m=Tref。
(2)若V<20km/h且电池需要充电,此时发动机应该介入工作,由于此时发动机处于低效率区间,动力系统工作在发动机直接驱动模式,发动机的需求转矩T*ICE=Tref,电机需求转矩T*m=0。
(3)若V>20km/h,Tref<TICE_max,且SOC>40%,为发动机直接驱动模式,发动机转矩满足车辆行驶需求,不需电动机辅助,发动机需求转矩T*ICE=Tref,电动机需求转矩T*m=0。
(4)若V>20km/h,Tref<Tice_max且电池需要充电,此时动力系统工作在轻载发电模式,发动机的需求转矩等于车辆需求转矩加电池充电转矩即T*ICE=Tref+Tbatt,电动机的需求转矩等于发动机转矩减车辆需求转矩即T*m=Tref-TICE,此时电动机为发电状态,T*m为电机充电转矩。
(5)若V>20km/h,T*ICE_max>Tref且SOC>40% ,此时为联合驱动模式,发动机需求转矩等于最大转矩即T*ICE=T*ICE_max,此时电动机处于驱动状态,T*m为电机助力转矩。
(6)若V>20km/h,T*ICE_max>Tref,电池需充电,此时电动机停止工作,发动机直接驱动电动机需求转矩T*m=0。
1.2 制动转矩分配规则
混合动力汽车制动过程中有再生制动,复合制动和机械制动3种制动工作模式。如果电池SOC较高(一般>80%)或车速低于一定值(5km/h)或者紧急制动时,总制动力矩全部由机械制动力矩提供。如果满足条件SOC<80%、车度高于以及制动强度低于0.7,则以再生制动为优先制动[8]。若电动机当前转速下最大转矩Tm_max>Tbrake_ref,则电动机再生制动,否则采用复合制动。为实现最大能量回收,让电动机工作在当前转速最大转矩状态,有T*m=Tm_max,T*mech=Tbrake_ref-Tm。
2 仿真结果及分析
2.1 仿真结果
仿真初始条件为:电池SOC为40.29%,车速为零,加速踏板信号设置如图2所示。

图2 加速踏板信号

图3 车速
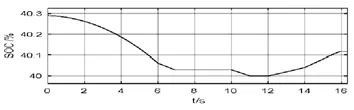
图4 电池SOC

图5 离合器
以下仿真实现了同轴并联式HEV动力系统纯电动模式、发动机单独驱动模式、发动机电动机联合驱动模式、轻载发电模式和再生制动五种运行模式,以及部分制动行驶工作模式,接下来按照模型运行的时间顺序对不同工作模式下的加速踏板信号、电池SOC状态、车速以及发动机电动机转矩分配情况进行分析。
(1)从0到6.9s,系统处于纯电动工作模式。车速从零开始加速,电池SOC从40.29%逐渐降低,车辆处于电动机单独驱动状态,发动机不提供转矩,此时有TM=Tref,TICE=0。
(2)从6.9s到10s,系统处于发动机单独驱动模式。车速达到 20km/h后继续加速,此时发动机可以提供车辆行驶所需的全部转矩,电动机停止工作,仅发动机工作,此时TICE=Tref,TM=0 。

图6 电动机波形图
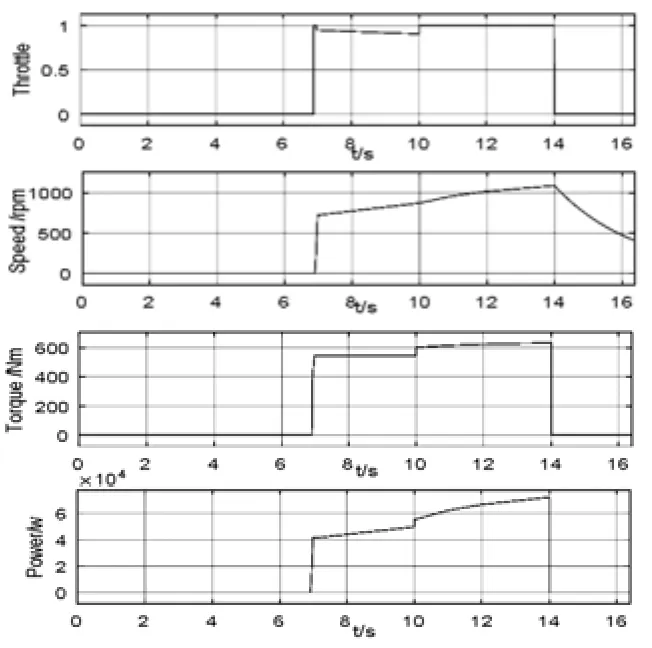
图7 发动机波形图
(3)从10s到11s,系统处于联合驱动模式。车速继续上升,电池SOC再次开始下降直到11s达到40%,此时车辆行驶需求转矩大于发动机所能提供的最大转矩,发动机与电动机联合驱动,TICE=TICE_max,TM=Tref-TICE。
(4)从11到 12s,系统处于发动机单独驱动模式。车速继续上升但加速度小于10s-11s时,此时SOC下降到40%并停止供电,电动机不再工作,TICE=Tref,TM=0。
(5)从12s到14s,系统处于轻载发电模式。车速继续升高,电池SOC也开始升高。车辆行驶需求的转矩小于发动机能提供的最大转矩,发动机一部分转矩直接驱动汽车,另外提供一部分转矩给电动机从而给电池充电,TICE=Tref+Tbatt,TM=TICE-Tref。
(6)从14s到16s,系统处于制动模式。加速踏板信号降低到-50%,车速开始下降,电池 SOC上升,发动机停止工作,电动机处于发电状态。此时处于复合制动状态,车辆的动能一部分通过电动机被转化为电能储存在电池中,另一部分通过摩擦制动转换为热能消耗掉。在16s时车速降低到5Km/h,制动模型从复合制动转变为机械制动模式。
以上仿真实现了所预期的工作模式,各工作模式下转矩的分配以及车速和电池SOC的变化符合转矩分配规则,仿真结果证明了所建模型的正确性以及控制策略的有效性。
3 结论
本文以同轴并联式混合动力客车动力系统为研究对象,设计了基于逻辑门转矩分配的控制策略,详细分析了动力系统驱动转矩分配规则和制动转矩分配规则,并且仿真实现了所预期的工作模式,各工作模式下转矩的分配以及车速和电池SOC的变化符合转矩分配规则,仿真结果验证了本文提出的控制策略的有效性。
参考文献
[1] De Leon N P. Design and simulation of a fast-charging station for plug-in hybrid electric vehicle (PHEV) batteries[J]. 2011.
[2] Bayram I S, Michailidis G, Devetsikiotis M, et al. Smart Vehicles in the Smart Grid: Challenges, Trends, and Application to the Design of Charging Stations[J]. 2012, 3:133-145.
[3] Syed F U, Kuang M L, Czubay J, et al. Derivation and Experimental Validation of a Power-Split Hybrid Electric Vehicle Model[J]. IEEE Transactions on Vehicular Technology, 2006, 55(6):1731-1747.
[4] Reid C, Blekhman D, Banales G, et al. Design and Development Process of a Parallel-Through-The-Road Plug-In Hybrid Electric Vehicle[J]. 2012.
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
