
串联机械臂伺服控制系统的研究
2018-05-24 07:09李占贤
机械工程与自动化 2018年2期
黄 健,李占贤
(华北理工大学 河北省工业机器人产业技术研究院,河北 唐山 063210)
0 引言
伺服系统是构成自动化体系的基本环节,是自动控制系统的一个分支,近几十年来,伴随着微电子技术和计算机技术的飞速发展,以及电力半导体和电机制造技术的巨大进步,使得伺服技术在许多高科技领域都有发挥,尤其在机器人研究领域更是得到广泛应用[1]。目前机器人开发朝着智能机器人的方向发展,要求机器人能完成更加复杂和更加精细的工作。这就使得机器人的研究在高水平上进行,同时也对机器人控制性能提出了更高要求[2],伺服控制技术就成了其中的关键技术之一,因此本文对串联机械臂伺服控制系统进行了研究。
1 机械臂
机械臂结构如图1所示。该空间机械臂主要由安装底座、大臂、小臂、手腕、手爪顺次串联组成。安装底座和大臂之间、大臂和小臂之间、小臂和手腕之间均构成转动副[3],手腕和手爪之间没有相对转动。其中安装底座、大臂和小臂均在一个平面内,而手腕则垂直于该平面,手爪与手腕也是互相垂直的关系。机械臂各连杆相互连接的关节轴分别由伺服电机驱动,一共使用3个伺服电机,电机驱动关节轴转动,从而使各关节转动。各关节的运动累积可以使手爪完成一定的动作。
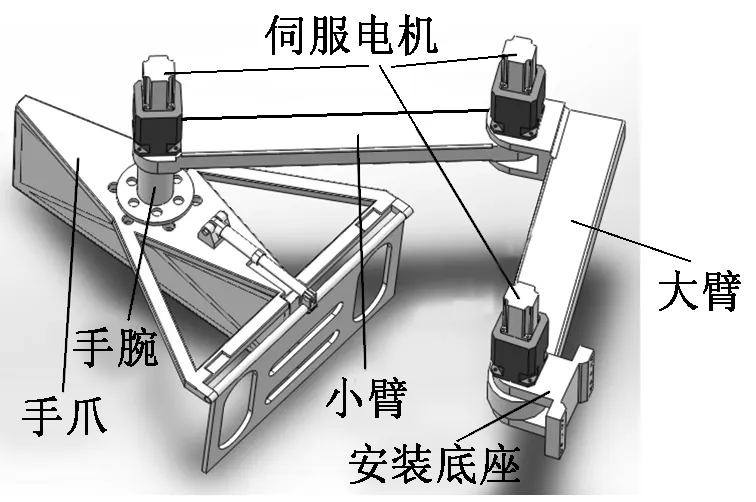
图1 机械臂结构
2 控制系统
查阅机电系列设计手册和各商家的产品使用说明书,选择西门子品牌的电气硬件。该串联机械臂的控制系统主要由SIMOTION运动控制模块、SINAMICS S120驱动模块和伺服电机组成[4],与之相配套的设备还有直流24 V电源、装载有SIMOTION SCOUT软件的PC机以及电源线和通讯线等。
SIMOTION控制模块主要具有逻辑控制功能(PLC)、运动控制功能以及其他工艺功能。SIMOTION有3种硬件平台,即基于控制器的SIMOTION-C、基于PC的SIMOTION-P和基于驱动的SIMOTION-D[5]。
SINAMICS S120驱动模块包括用于单轴的AC/AC变频器和用于公共直流母线的逆变器,它由电源模块和电机模块组成。电源模块又分为基本型(BLM)、智能型(SLM)和主动型(ALM)。电机模块即为逆变单元,分为书本型和装机柜型,其中书本型又分为单轴电机模块和双轴电机模块。 SINAMICS S120模块化系统设计的大量部件和功能之间具有相互协调性,因此用户可以组合使用,以构成最佳方案[6]。用直流24 V电源给控制模块供电,装载有SIMOTION SCOUT软件的PC机用来编写控制程序,将其下载到控制器模块中控制伺服电机。通讯线通常使用DRIVE-CLiQ电缆,用它来传递信号,实现信息的传输、交流与反馈。
3 用SIMOTION SCOUT软件配置硬件
3.1 配置控制模块
SIMOTION有三种硬件平台,本文选择SIMOTION D,它是基于驱动的运动控制系统,其中集成了SINAMICS S120伺服驱动器的一个驱动单元,它有多种型号,本文选取了D425,具体参数见表1。

表1 SIMOTIOND4x5技术参数
SIMOTION D425内部集成了一个CU320,可以控制6个伺服轴,它与外部非集成的CU320有相同的功能。因为本文需要控制3个伺服轴,选择D425足以满足使用要求。集成D425配置图如图2所示。
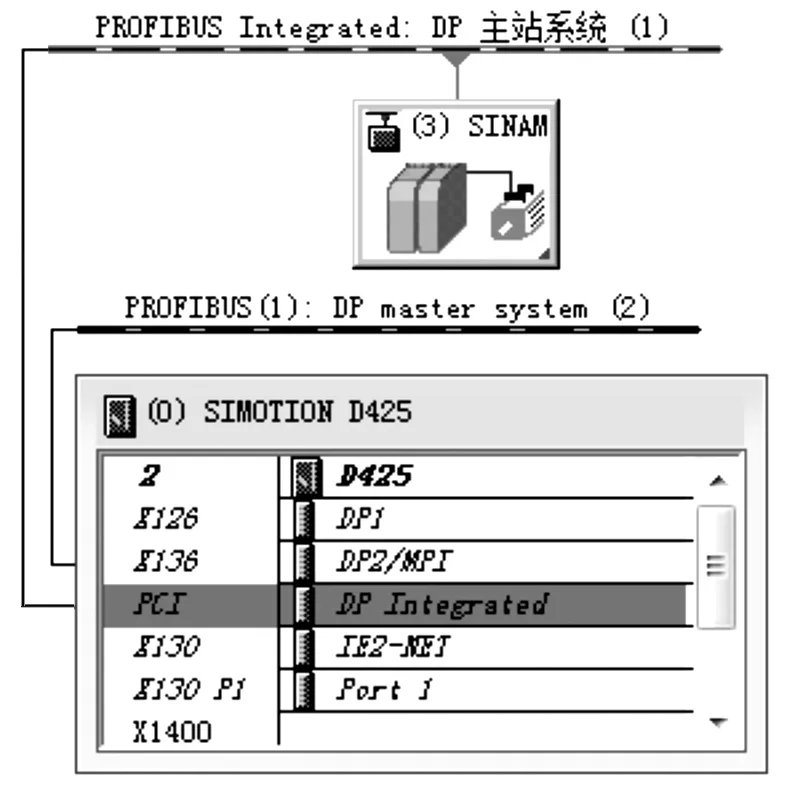
图2 集成D425配置图
3.2 配置驱动模块
3.2.1 电源模块
电源模块Supply1的订货号为6SL3130-7TE21-6Axx,参数如图3所示。

图3 电源模块Supply1参数
电源模块Supply2的订货号为6SL3130-7TE21-6Axx,参数如图4所示。
3.2.2 电机模块
(1) 双轴电机模块。双轴电机模块控制大臂和小臂电机,订货号为6SL3120-2TE15-0Axx,参数如图5所示。
(2) 单轴电机模块。单轴电机模块控制手腕电机,订货号为6SL3120-1TE13-0Axx,参数如图6所示。
3.3 配置伺服电机
为使机械臂在工作面上推动水泥袋运动,取水泥袋与工作面摩擦因数μ=0.5,水泥质量m=50 kg,大臂质量m1=5 kg,小臂质量m2=5 kg,手爪的质量m3=3 kg。认为质心在各连杆几何中心,l1、l2、l3分别为各连杆质心到水泥袋质心的距离,其中l1=1 100 mm,l2=600 mm,l3=300 mm。取减速器传动效率η=90%,安全系数为1.2,一个工作行程时间为Δt=1.5 s。

图4 电源模块Supply2参数
3.3.1 大臂电机及其减速器选型计算
大臂转动惯量:
工作时大臂转动角度Δω=20°,所用时间Δt=1.5 s。
大臂电机启动转矩:
水泥袋摩擦产生力矩:
T12=μmgl1=275 N·m.
总力矩T1=T11+T12=276.89 N·m,取T1=300 N·m。
则减速器所需输出最小转矩为:
Tmin1=1.2T1=360 N·m.
选择减速器型号为PS142,传动比i1=100∶1。
则伺服电机需输出力矩为:
选择大臂电机订货号为1FT7044-5AF7x-1xxx,参数如图7所示。

图5 双轴电机模块参数

图6 单轴电机模块参数
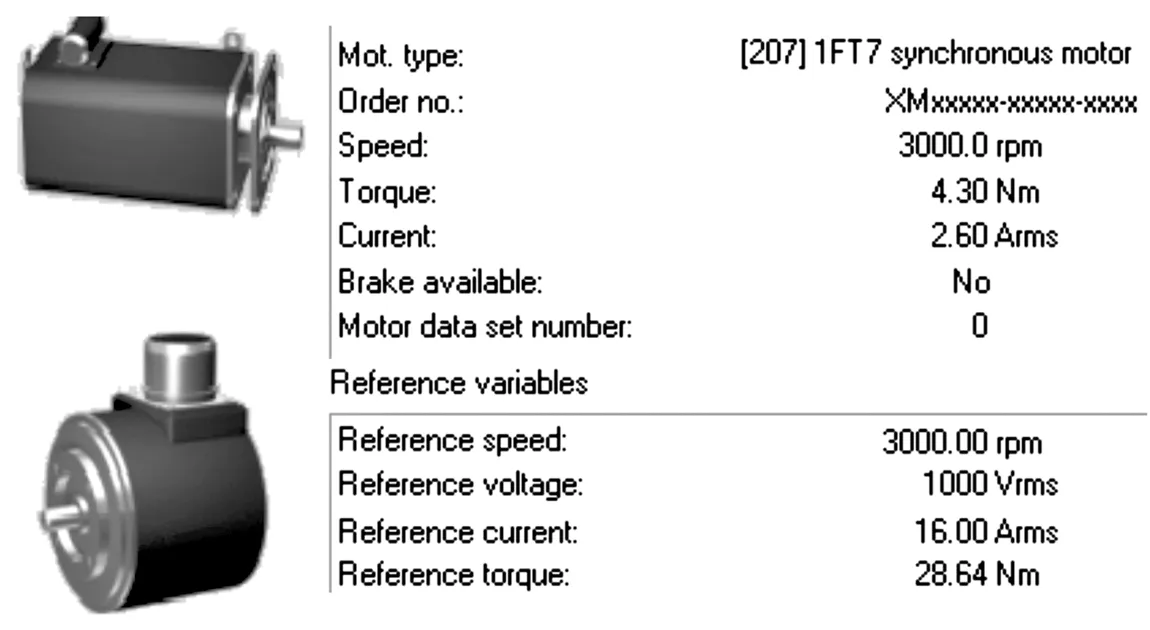
图7 大臂电机参数
3.3.2 小臂电机及其减速器选型计算
小臂转动惯量为:
工作时小臂转动角度从ω0=0°到ω1=150°,所用时间Δt=1.5 s。
小臂电机启动转矩为:
水泥袋摩擦产生力矩为:
T22=μmgl2=150 N·m.
总力矩T2=T21+T22=153.61 N·m,取T2=170 N·m。
则减速器所需的输出最小转矩为:
Tmin2=1.2T2=204 N·m.
选择纽士达特公司生产的行星减速器,其型号为PS115,传动比i2=100∶1。
则伺服电机需输出的力矩为:
选择小臂电机订货号为1FK7042-2AF71-1xxx,参数如图8所示。

图8 小臂电机参数
3.3.3 手腕电机及其减速器选型计算
手腕电机输出力矩约为小臂电机输出力矩的60%,可得手腕电机输出力矩为:
Tout3=0.6Tout2=1.362 N·m.
选择手腕电机订货号为1FK7034-2AF21-1Axx,参数如图9所示。
综上所述,选型电机详细参数如表2所示。
4 结语
该串联机械臂伺服控制系统的核心是SIMOTION D控制模块和SINAMICS S120多轴驱动模块。
该控制模块是具有高度集成化的系统,把CPU集成到其中节省了空间,提高了设备的利用效率。驱动模块是高度模块化的系统,各组成模块都有系列产品可供选择,根据使用要求合理选择各模块,然后拼接在一起使用。伺服电机可以实现精确定位,可用于精度要求很高的场合。整套控制系统可以使机械臂精准实现预定动作。
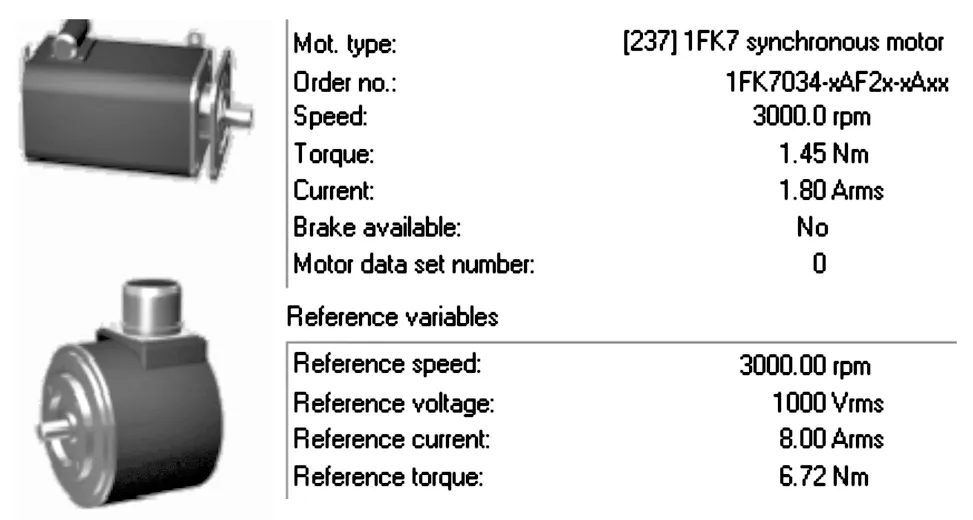
图9 手腕电机参数

电机订货号额定转速r/min额定转矩N·m额定功率kW大臂1FT7044⁃5AF7x⁃1xxx30004.31.35小臂1FK7042⁃2AF71⁃1xxx30002.60.8手腕1FK7034⁃2AF21⁃1Axx30001.450.5
参考文献:
[1] 王耀南.机器人智能控制工程[M].北京:科学出版社,2004.
[2] 范永,谭民.机器人控制器的现状及展望[J].机器人,1999(1):75-80.
[3] 熊有伦.机器人技术基础[M].武汉:华中理工大学出版社,1996.
[4] 郭庆鼎,王成元.交流伺服系统[M].北京:机械工业出版社,1994.
[5] 刘苗,杨文明,梅江平.基于SIMOTION的高速装箱机的控制系统开发[J].机器人技术与应用,2015(4):31-33.
[6] 杜强,李继方.基于S120驱动控制系统的多电机共直流母线实验系统的研究[J].通信电源技术,2011(5):36-39.
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
微特电机(2020年11期)2020-12-30
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
载人航天(2016年4期)2016-12-01
电子制作(2016年1期)2016-11-07
综合智慧能源(2014年1期)2014-09-10
