
六关节工业机器人伺服电机选型方法
2018-05-24 07:09吴文杰石旗勇
机械工程与自动化 2018年2期
吴文杰,石旗勇
(浙江万丰科技开发股份有限公司,浙江 绍兴 312500)
0 引言
进入21世纪,国内工业机器人发展迅速,特别是2012年之后,国内工业机器人得到国家有关部门的重视和高等院校的重点研发,研发和制造工业机器人的厂家越来越多[1]。工业机器人是集机械、电子、控制和计算机技术为一体的高科技产品,是一个复杂的机电系统,研发过程中,伺服电机的正确选型是核心问题之一。目前,针对六关节工业机器人伺服电机选型计算问题,已经有不同文献提出了不同方法。例如:康国坡、陈新度、夏鸿建[2]以六自由度喷涂机器人为研究对象,通过建立机器人关节电机峰值预估模型计算关节峰值扭矩,再以峰值扭矩为依据进行电机选择的方法;刘海涛、梅江平、赵学满等[3]提出以机器人末端执行器的速度和加速度预估机构中伺服电机转子惯量、额定转速及峰值转矩从而选择电机的方法。但是,这些电机选型方法工作周期长,计算量和校核量均较大,在企业实际开发设计过程中很难操作。
为减少伺服电机选型计算量,缩短工作周期,本文以六关节工业机器人为研究对象,提出了基于机器人主要设计指标的伺服电机参数选型计算方法,选型计算量和校核量较小,并将其应用于具体产品设计,取得良好效果。
1 六关节工业机器人分析
六关节工业机器人各关节传动链通常是由电机+减速器构成的,电机为动力源,减速器起降速增力的作用。因而,在机器人各关节设计过程中,电机和减速器的选型是相互影响的,需要综合考虑。某企业开发的六关节机器人如图1所示,本文以该机器人手腕伺服电机选型计算为例进行论述,其他各关节计算方法类似。
2 电机功率与转速匹配
六轴关节机器人手腕负载额定功率Pe(kW)为:
Pe=(Tpl·n)/9 550.
(1)
其中:Tpl为允许负载转矩,Nm;n为负载额定运动速度,r/min。

图1 六关节工业机器人
允许负载转矩Tpl(Nm)由下式计算:
Tpl=MgL.
其中:M为最大负载质量,kg;L为负载质心到关节回转轴的距离,m。
所选电机的额定输出功率P须大于腕部负载额定功率,即P≥Pe。与此同时,关节最大运动速度与电机最大转速之间应满足如下关系:
(ω/6)·i≤nmax.
(2)
其中:ω为关节最大运动速度,(°)/s;i为关节总传动比;nmax为负载的最高转速,r/min。
3 电机转矩匹配
根据伺服电机的工作曲线,负载转矩应满足:当负载做匀速运动时,施加在伺服电机轴上的负载转矩应在电机的连续额定转矩范围内,即在工作曲线的连续工作区内。各关节系统折算到该关节伺服电机轴上的负载转矩TL(Nm)由下式计算:
TL=Tpl/(η·i·k)+Tz.
(3)
其中:Tz为关节自重引起的转矩,Nm;η为传动效率;k为经验系数,k一般取0.7~0.8。
按满足下式的条件选择伺服电机:
TL≤Ta.
(4)
其中:Ta为伺服电机的额定转矩。
4 电机惯量匹配及负载惯量的计算
为保证关节机器人有较高的轨迹精度,要求机器人具有较高的快速响应特性。负载惯量与电机的响应和快速转动加速时间(ACC)/减速时间(DEC)息息相关。因此,加在电机轴上的负载惯量的大小将直接影响电机的灵敏度以及整个伺服系统的精度[4]。当负载惯量是伺服电机的5倍以上时,会使转子的灵敏度受影响。因此,电机惯量JM和负载惯量JL必须满足:
1≤JL/JM≤5.
(5)
由电机驱动的所有运动部件都是电机的负载惯量,电机轴上的负载总惯量可以通过计算各个被驱动部件的惯量按下述规律将其相加得到,如表1所示。
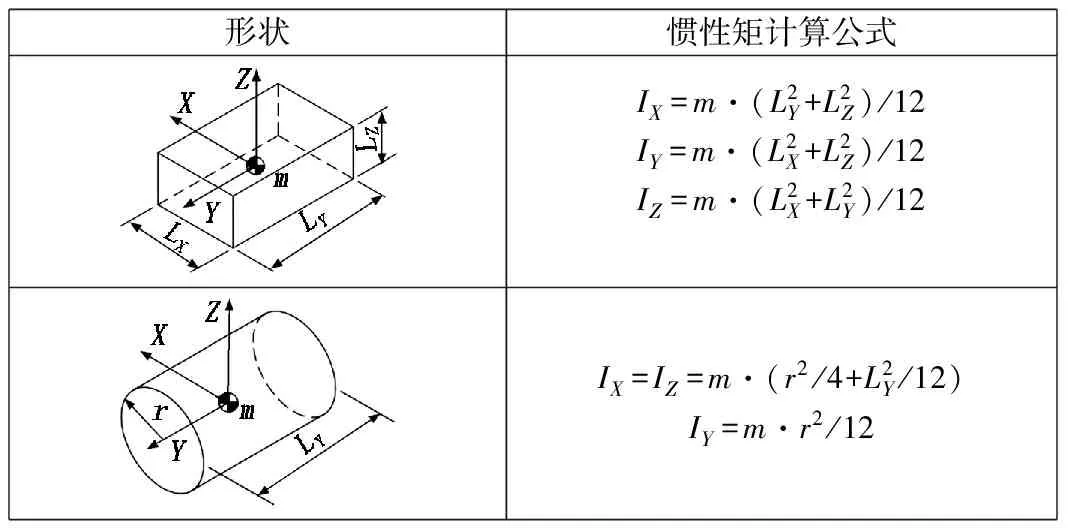
表1 主要形状惯性矩的计算公式
六关节工业机器人手腕(J4轴、J5轴和J6轴)负载如图2所示,其中各轴惯量可进行如下分解计算:
J6轴转动惯量为:

(6)
其中:I为对应轴的转动惯量;m为负载质量;X、Y、Z为负载质心到对应轴的距离。
J6轴负载换算到电机轴上的负载转动惯量为:
(7)
其中:iJ6为J6传动链总减速比。
J4、J5轴转动惯量会因为J6轴的姿势不同而发生变化,为了计算方便,可取:
IJ4=IJ5=max(IX,IZ).
其中:

(8)
IZ1+IZ2+IZ3+IZ4.
(9)
J4、J5轴负载换算到电机轴上的负载转动惯量为:
(10)
(11)
其中:iJ5为J5轴传动链总减速比;iJ4为J4轴传动链总减速比。

图2 六关节工业机器人手腕负载
5 结论
本文根据机器人设计主要技术指标,即最大功率、最大运动速度、最大允许力矩、最大允许惯量等,按照上述式(1)~式(4)的限定条件对各关节伺服电机进行选型计算,所选伺服电机在WF210工业机器人(如图3所示)产品上得到了应用验证,并实现了机器人产品所要求的运动特性和运动精度。

图3 WF210六轴工业机器人
参考文献:
[1] 赵从虎.50 kg工业机器人本体设计[J].中国科技投资,2014(7):265-266.
[2] 康国坡,陈新度,夏鸿建.基于动力学分析的喷涂机器人电机选型[J].机械设计与制造,2012(12):148-150.
[3] 刘海涛,梅江平,赵学满,等.一种2自由度球面并联机构动力学建模与伺服电机参数预估[J].中国科学,2008,38(1):111-124.
[4] 肖剑,马自勤.机床伺服电机的选型方法分析[J].机械研究与应用,2011(4):48-52.
猜你喜欢
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
现代电力(2022年2期)2022-05-23
防爆电机(2021年3期)2021-07-21
物理与工程(2019年2期)2019-07-09
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
郑州轻工业学院学报(社会科学版)(2019年1期)2019-04-12
中国惯性技术学报(2018年1期)2018-05-10
科学家(2017年1期)2017-04-11
制导与引信(2016年3期)2016-03-20
