
100%低地板有轨电车动力学性能分析
2018-05-24 07:08刘方伟牛悦丞杜成义
机械工程与自动化 2018年2期
刘方伟,李 芾,徐 凯,牛悦丞,杜成义
(西南交通大学 机械工程学院,四川 成都 610031)
1 低地板有轨电车
100%低地板有轨电车是一种地板面高度在350 mm~400 mm以下的轨道交通车辆。其地板面高度低,乘客上下车十分方便。低地板有轨电车每小时单向运输能力一般为2万人次左右,介于地铁和公共汽车之间,属于中等运能的一种公共交通形式,既可作为大型城市交通系统中的辅助系统,又可作为中小城市交通系统中的主要运输系统。
目前我国100%低地板有轨电车的应用越来越广泛。图1为五模块100%低地板有轨电车,前后为动力车,其次为浮车,两浮车之间为非动力车。

图1 五模块100%低地板有轨电车
2 车辆主要参数及动力学模型
本文所研究的100%低地板有轨电车为我国自主开发的,该有轨电车总体采用五模块结构,车辆前后两端为带有司机室的动车车体,中间为拖车车体和两节浮车车体,动车和拖车下分别为动力转向架和非动力转向架。车辆运行时车体受到的横向力、纵向力和垂向力由3台转向架共同承受。所计算100%低地板有轨电车采用的编组形式和铰接方式如图2所示。
2.1 低地板车辆铰接方式
现行低地板车辆连接铰型式基本为固定铰、转动铰、自由铰三种。相邻车体之间的下铰采用固定铰,固定铰具有绕x、y、z轴的转动自由度,动力学建模时在joint中利用球铰来实现固定铰的功能。相邻车体之间的上铰采用转动铰,转动铰能够绕着z轴旋转,并且还能承受纵向力和横向力,在模拟车体之间的转动铰连接时,采用约束Constraints中的自定义铰实现,限制x、y方向的平移。利用固定铰和转动铰的组合,使得相邻两车体之间只有相对摇头的自由度。为了使车辆顺利通过竖曲线,在一个浮车车体和拖车车体之间采用了自由铰。自由铰的主要功能是用来限制相邻车体之间的侧滚运动,在模型中通过设置一个横向的拉杆来实现,拉杆的一端通过在joint中利用球铰来与拖车车体连接,另一端通过约束Constraints中的自定义铰来连接到浮车上。
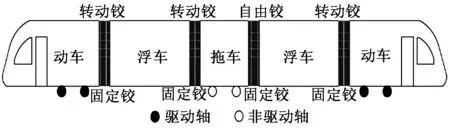
图2 低地板车辆编组形式和铰接方式
2.2 转向架结构
该低地板有轨电车采用小轮径传统轮对转向架来实现低地板,其转向架包括两台动力转向架和一台非动力转向架。动力转向架采用无摇枕轴箱外置式结构。一系悬挂为对称锥形橡胶弹簧;二系悬挂采用沙漏橡胶弹簧,坐落于轮对上方侧梁处的二系弹簧座上。采用单牵引拉杆装置来实现车体和转向架之间纵向力的传递。电机和齿轮箱为一体式结构,通过抱轴轴承支承在车轴上,并通过弹性吊杆悬挂在侧梁和横梁的吊座处,电机斜对称布置在转向架前后端。转向架设置有两套磁轨制动装置和一轴一盘的轴盘制动装置。非动力转向架与动力转向架不同之处在于其没有电机和齿轮箱,每根轴都有两个轴盘制动器,布置在车轴的两端。低地板车辆的主要参数如表1所示。
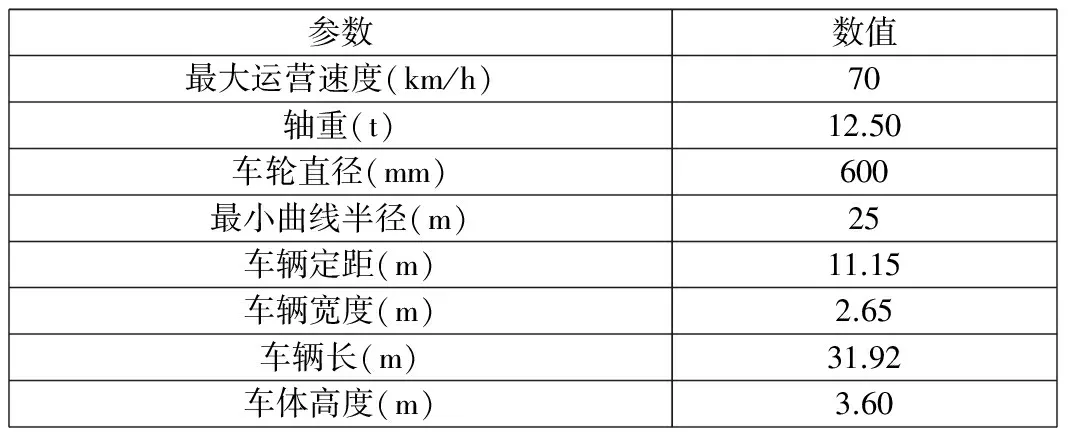
表1 低地板车辆主要参数
3 车辆动力学性能分析
3.1 车辆运行稳定性
将车辆以不同速度先通过一段具有美国V级线路不平顺的轨道,之后车辆通过无激励轨道。轮对通过有激励部分会产生一定横移量,后在无激励部分进行衰减,经过一段时间后观察轮对横移量在激振后是否收敛来判断车辆的蛇行稳定性。
计算工况为空车工况和重车工况,计算步长选取为5 km/h,计算结果如图3所示。由图3可知,车辆的临界速度在空车和重车工况下分别为125 km/h和130 km/h,该车的稳定性满足运营要求。
3.2 车辆运行平稳性
车辆在运行中车体的横向振动加速度ay(m/s2)
和垂向振动加速度az(m/s2)不能超过下列极限值:
ay≤2.5.
(1)
az≤2.5.
(2)
根据GB5599—85规定,车辆的运行平稳性还应满足Sperling平稳性评价指标,其计算公式为:
(3)
其中:W为平稳性指标;a为振动加速度;f为振动频率;F(f)为频率的修正系数。
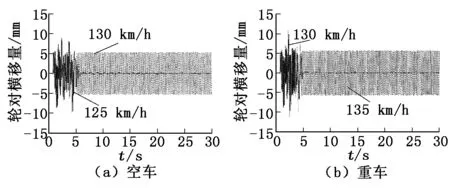
图3 临界速度计算
由于该车采用了浮车的结构形式,使得车体之间的振动相互关联的同时又存在着差异。在计算时,传感器的设置如图4所示。1号、7号Mark点位于司机室座椅正下方;2号、6号Mark点位于动车转向架正上方车体地板面;3号、5号Mark点位于浮车车体正中央地板面;4号Mark点位于拖车车体正中央地板面。

图4 传感器设置位置
我国有轨电车线路基本为新修线路,且条件较好,故在计算车辆运行平稳性时选用美国V级谱。车辆以不同速度通过已设定的轨道激励,计算所得的空车和重车平稳性结果分别如图5和图6所示。

图5 空车工况下各测点横向、纵向平稳性指标

图6 重车工况下各测点横向、纵向平稳性指标
由图5可以看出:空车工况下车辆横向平稳性指标随速度的增加出现较大波动,其原因是该有轨电车为浮车型结构,模块之间的运动自由度与整体式车体的车辆不同,再加上变化的轨道激励作用使得其横向平稳性指标出现较大波动;其垂向平稳性指标随速度的增加而增加。由图6可以看出:重车工况下车辆横向平稳性指标的变化也是随速度的增加波动较大,其原因与空车工况类似;其垂向平稳性指标随速度的增加而增加。
GB 5599—85标准规定,车辆运行平稳性通过平稳性指标W进行评定,其评判标准如表2所示。
由计算结果可以得出,在美国V级线路上运行时,在80 km/h速度范围内,车体横向平稳性指标最大值为2.66,垂向平稳性指标最大值为2.65,在GB5599—85规定的2.5~2.75范围内,满足新造客车达到良好等级的标准。

表2 车辆平稳性评判标准
3.3 曲线通过安全性
低地板有轨电车运行在城市线路中,其线路显著的特点是小半径曲线较多。根据GB50490—2009《城市轨道交通技术规范》,为提高曲线通过速度,并满足乘客舒适度的要求,规定允许未被平衡横向加速度0.4 m/s2是乘客舒适度的基本临界点。由于有轨电车与其他车辆共用路权,曲线不易设置超高,在没有超高的曲线情况下车辆承受离心力与速度之间的关系为:

(4)
其中:R为曲线半径;m为车辆质量;a1为离心加速度。
由未被平衡横向加速度应该小于0.4 m/s2可以得到在不同半径时车辆限速v:
(5)
该100%低地板有轨电车通过曲线的最小半径为25 m,根据式(5)得出通过该曲线时限制速度为11.4 km/h。在SIMPACK中曲线的设置为:直线段长50 m,缓和曲线长度为15 m,圆曲线长度为39.25 m,曲线半径为25 m,在轨道上施加美国V级线路不平顺,分别计算空车工况和重车工况下各轮对轮轨横向力、轮轴横向力、脱轨系数、轮重减载率等动力学指标。
4 结论
根据对100%低地板有轨电车的建模和动力学性能计算与分析得出以下结论:
(1) 该100%低地板有轨电车空、重车工况下蛇行临界速度都远高于其最大运营速度,故其具有良好的运行稳定性。
(2) 该100%低地板有轨电车横向和垂向平稳性都良好。
(3) 该100%低地板有轨电车在通过最小半径为25 m曲线时,各轮对的曲线通过性能指标都满足要求。

表3 空车工况下曲线通过性能

表4 重车工况下曲线通过性能
参考文献:
[1] 李刚,李芾,黄运华.100%低地板轻轨车辆的发展与运用[J].机车电传动,2013(4):51-56.
[2] 李明,戴焕云,丁磊.70%低地板轻轨车建模及动力学分析[J].交通运输工程学报,2004,4(2):50-52.
[3] 杨阳,李芾,夏迎旭,等.70%低地板车辆几何曲线通过及其动力学性能研究[J].铁道机车车辆,2015,10(5):92-95.
[4] 李玉青,陈康,张江,等.100%低地板轨道车辆的动力学分析[J].地铁与轻轨,2016,8(4):67-71.
[5] Harry hondius.All-low-floor cars dominate orders[J].Railway Gazette International,1993(6):62.
[6] 王福天.车辆系统动力学[M]. 北京:中国铁道出版社,1994.
[7] Masuda,Tamotsu.Development of low floor light rail vehicle[J].Japanese Railway Engineering,2004(152):15-18.
猜你喜欢
铁道车辆(2021年1期)2021-08-30
数学物理学报(2021年3期)2021-07-19
科学与生活(2021年29期)2021-03-24
科技与创新(2020年19期)2020-10-09
哈尔滨铁道科技(2020年4期)2020-07-22
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
制造技术与机床(2019年12期)2020-01-06
铁道标准设计(2019年7期)2019-07-10
西南交通大学学报(2018年5期)2018-11-08
