
后轮主动转向汽车前馈控制器研究对比分析
2018-05-24 07:08崔高健李绍松张增帅窦景雷任晓光
机械工程与自动化 2018年2期
崔高健,李 斌,李绍松,张增帅,窦景雷,任晓光
(长春工业大学 机电工程学院,吉林 长春 130012)
0 引言
熟练驾驶传统前轮转向汽车(2WS)的驾驶员都清楚,传统前轮转向汽车在转弯时容易发生侧滑、甩尾等危险情况,四轮转向汽车(4WS)能提高汽车的行驶安全性,所以有必要对四轮转向汽车的安全性、操作性及稳定性进行研究。
后轮主动转向汽车(四轮转向汽车的一种类别)具有不改变驾驶员的传统驾驶感觉,同时又能实现四轮转向、保证行车安全的优点。本文以后轮主动转向汽车为研究对象,在建立后轮主动转向汽车二自由度模型的基础上搭建两种不同的控制策略,通过仿真软件Carsim与Matlab/Simulink进行联合仿真,对两种前馈控制器的有效性进行对比分析。
1 后轮主动转向汽车前馈控制器搭建
在传统的前轮转向系统中,转向轮为汽车前轮,驾驶员与转向系传动比共同决定转向角的大小,方向盘转角与传动比的比值即为转向角,汽车后轮基本不转[1]。而后轮主动转向汽车在不改变传统汽车前轮和方向盘之间机械连接的前提下,通过线控系统将后轮引入转向系统参与转向。后轮主动转向汽车的转向控制系统是一个闭环系统,可以根据转向盘转角及车辆的运行状态判别出驾驶员的转向意图,计算出实现该转向目的所需的后轮转角,改善车辆的操作稳定性[2]。
1.1 汽车二自由度车辆模型的建立
在研究后轮主动转向汽车的操作稳定性时,一般将汽车简化成线性二自由度车辆模型进行分析,利用该模型可以得到普遍适用性结论[3]。为便于研究,建立运动微分方程时通常做以下设定:①不考虑转向系统的影响,直接以前轮转角作为输入;②不考虑悬架的作用,车身只作平行于地面的平面运动,沿z轴的位移、绕y轴的俯仰角和绕x轴的侧倾角均为零;③假定汽车x轴方向的前进速度u不变;④侧向加速度限定在0.4g以下;⑤驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用[4-5]。
简化后得到的汽车二自由度车辆模型如图1所示。
图1中,δf、δr为汽车前、后轮转向角;β为汽车车身质心侧偏角;ωr为汽车车身横摆角速度;v为汽车行驶速度;a、b分别为质心到汽车前、后轴的距离;l为汽车前、后轴的距离;Fyf、Fyr分别为前、后轮的侧向力;CG为汽车质心;vf、vr分别为前、后轮速度;αf、αr分别汽车前、后轮的侧偏角。

图1 汽车二自由度车辆模型
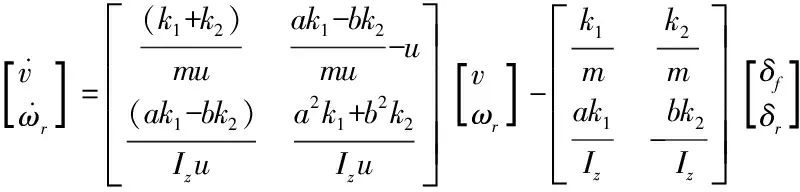
在上述假设下,根据牛顿定律推导出力和力矩方程,则汽车二自由度车辆模型可表示为:
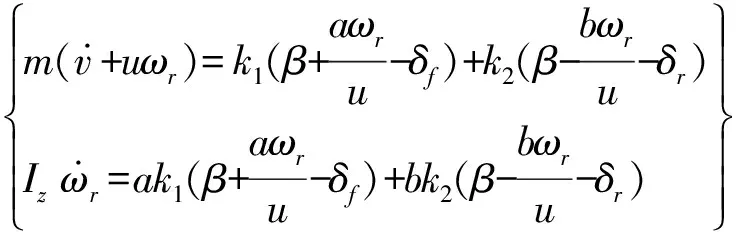
(1)
其中:m为汽车整车质量;k1、k2分别为汽车前、后轴等效侧偏刚度;Iz为汽车转动惯量。
线性二自由度车辆模型是研究后轮主动转向汽车操作稳定性的基础,在此基础之上可得到后轮主动转向汽车前轮转角前馈比例控制方法与横摆角速度反馈比例控制方法。
1.2 后轮主动转向汽车前轮转角前馈比例控制及模型搭建
前轮转角前馈比例控制能保证后轮主动转向汽车在稳态时使质心侧偏角恒为零,则式(1)可改写为:
(2)

(3)
运用仿真软件Carsim与Matlab/Simulink搭建前轮转角前馈比例控制联合仿真模型,如图2所示。

图2 前轮转角前馈比例控制模型
1.3 后轮主动转向汽车横摆角速度反馈比例控制及模型搭建
汽车横摆角速度反馈比例控制考虑到横摆角速度这一动态信息并将其作为反馈信息给系统,则式(1)可改为:

(4)
(5)
运用仿真软件Carsim与Matlab/Simulink搭建横摆角速度反馈比例控制联合仿真模型,如图3所示。
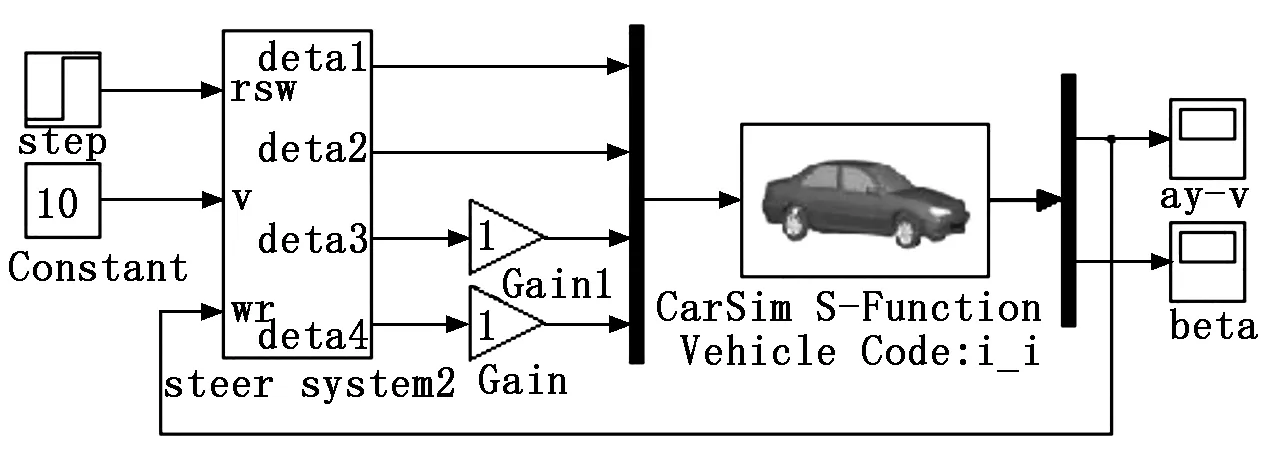
图3 横摆角速度反馈比例控制模型
2 仿真对比实验及分析
通过角阶跃和连续正弦实验分别考察上述两种前馈控制方法的有效性。利用Carsim与Matlab/Simulink进行联合仿真,在Carsim中搭建整车控制模型,其相关技术参数如表1所示。
对于车辆动力学控制主要有轨迹保持和稳定性控制两类任务,通常用侧偏角来描述轨迹保持好坏,用横摆角速度来描述稳定性问题,侧偏角、横摆角速度相互耦合,在研究中须根据实际情况有所侧重[6]。车辆在转弯时,为获得良好的操纵稳定性,β应等于或趋近0;并且为了减少四轮转向汽车驾驶员的心理负担,应使车辆的ωr接近于传统前轮转向车辆在相同条件下的稳态值[7]。

表1 搭建整车控制模型的相关技术参数
2.1 角阶跃输入动态仿真实验
角阶跃输入动态仿真实验主要考察汽车的转向特性以及车身的侧偏特性,从而确定车辆的稳定性。设车辆行驶速度分别为80 km/h和10 km/h,前轮输入参考值为3°的角阶跃信号,起跃时间为1 s,总仿真时间为10 s[8]。得到仿真结果如图4~图7所示。

图4行驶速度为80 km/h时横摆角速度与时间的关系图5行驶速度为80 km/h时质心侧偏角与时间的关系
2.2 连续正弦输入动态仿真实验
连续正弦实验是为进一步验证控制器的跟踪效果。设车辆行驶速度分别为120 km/h和10 km/h,前轮为正弦输入,正弦幅值为27(无量纲),频率为0.2 Hz,仿真时间为10 s[9]。得到的仿真结果如图8~图11所示。

图6行驶速度为10 km/h时横摆角速度与时间的关系图7行驶速度为10 km/h时质心侧偏角与时间的关系图8行驶速度为120 km/h时横摆角速度与时间的关系
由图4~图11可知,与传统前轮转向汽车相比,低速转向时,后轮主动转向汽车稳态横摆角速度大、质心侧偏角小,这表明转过相同的弯道时,后轮主动转向汽车在行驶过程中可以少打方向盘,转向灵活的同时轨迹保持能力强;高速时,后轮主动转向汽车的稳态横摆角速度要小,这表明在同样的弯道上行驶时,后轮主动转向汽车比传统前轮转向汽车需要多打方向盘不断地进行自动修正,减小驾驶员误打方向盘的可能,提高了汽车的主动安全性。

图9行驶速度为120 km/h时质心侧偏角与时间的关系图10行驶速度为10 km/h时横摆角速度与时间的关系图11行驶速度为10 km/h时质心侧偏角与时间的关系
3 结语
本文建立了后轮主动转向汽车二自由度汽车模型,同时搭建了两种前馈控制器的仿真模型。在汽车二自由度车辆模型的基础之上,对后轮主动转向汽车的两种前馈控制方法进行了对比分析和理论研究,重点对前轮角阶跃输入、连续正弦输入下后轮主动转向汽车的稳态响应进行了分析。仿真结果表明:这两种控制方法均改善了后轮主动转向汽车的操纵稳定性,且从综合情况来分析横摆角速度反馈比例控制方法既能保证汽车的良好稳定性,又能提高汽车的灵活性与机动性。
参考文献:
[1] 田承伟.汽车电控四轮转向控制策略研究[G]//2007中国汽车工程学会年会论文集.上海:中国汽车工程学会,2007:5.
[2] 宗长富,左建令,陈煜,等.汽车前轮电子转向控制算法研究[J].汽车工程,2003(增刊1):86-91.
[3] 张辉.基于主动四轮转向系统的高速汽车侧风稳定性控制研究[D].杭州:浙江大学,2014:26-28.
[4] 余志生.汽车理论[M].第4版.北京:机械工业出版社,2006.
[5] Wang R,Hu C,Wang Z,et al.Integrated optimal dynamics control of 4WD4WS electric ground vehicle with tire-road frictional coefficient estimation[J].Mechanical Systems & Signal Processing,2015,60-61:727-741.
[6] 沈扬风.四轮转向汽车的建模与仿真分析[D].武汉:武汉理工大学,2011:44-47.
[7] 周佳.四轮转向系统控制策略对比研究[D].北京:北京理工大学,2015:38-42.
[8] L Pascaliecal.Improving Vehicle Handling and Comfort Performance Using 4WS Vehicle[N].SAE Paper,2003-01-0961.
[9] 杜峰.基于线控技术的四轮主动转向汽车控制策略仿真研究[D].西安:长安大学,2009:58-63.
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物理教学探讨(2018年1期)2018-02-13
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
汽车文摘(2014年10期)2014-12-13
中国自行车·骑行风尚(2014年4期)2014-10-10
