一种用于天线面形恢复测量的无人机导航方案
2018-05-22 05:23何凯文
上海理工大学学报 2018年2期
何凯文, 叶 骞
(上海交通大学 机械与动力工程学院,上海 201100)
新疆奇台将建设110 m口径大型射电望远镜QTT[1]。为保证观测效率,须对其反射面进行实时测量和闭环修正。对于巨型天线,目前多采用远场测量方案[2]。近年来出现了使用无人机进行近场测量的新方法。该方法让无人机携带电磁发射源,在近场平面上飞行并收集位置数据,天线保持静止并收集无人机发出的电磁信号。面形恢复算法利用该信号结合位置数据才可解析出天线的变形,因此,必须获得无人机的位置信息。
针对无人机定位问题,目前部分研究专注于位置传感器的创新,例如使用无线信号的强弱值推算位置[3]。但由于无线信号强度具有有色噪声,导致此法误差较大。更加主流的做法是用视觉里程计辅助传统IMU+GPS导航系统[4],或者单纯利用SLAM对无人机进行定位和控制[5-8]。此法精度较高,但需要较强的计算能力。此外,更加直接的方法是使用差分GPS (GPS-RTK)测量[9]。这种方法技术成熟,容易实现。
理论上,使用差分GPS直接定位便可获得较高精度的位置数据。但对于天线测量工况,单纯使用差分GPS仍面临很多问题。首先,GPS对卫星信号强度非常敏感。由于天线的遮挡,差分GPS极有可能丢失部分卫星信号,大大影响测量精度。其次,由于机载RTK运算能力的限制,其数据频率普遍较低,不能达到面形恢复的数据密度要求。
为了解决上述问题,需要在飞机上加入另一个绝对位置传感器。双目视觉传感器搭配SLAM算法,由于精度较高,且除光照等条件外对其他因素不敏感,因而非常适合加入此导航系统。为了解决数据频率和GPS受到干扰时的数据可信度急剧下降的问题,必须加入数据融合算法提高数据密度,增加系统可靠性。适用于此应用场合的融合算法有粒子滤波器[10](PF)、扩展卡尔曼滤波器[11-13](EKF)和无损卡尔曼滤波器[14](UKF)等。由于机载计算能力有限,为了保证系统可靠性,本文采用EKF。
差分GPS和视觉传感器相对常规GPS精度更高,常规EKF在此条件下有固有缺陷。一方面,与高精度传感器相对的测量噪声协方差应设置较小值,以使数据权重大,这样容易造成滤波结果趋近直接测量值。另一方面,由于无人机使用环境复杂,系统噪声和测量噪声急剧变动,常规卡尔曼滤波缺乏对噪声的估计[15-17],可能在后期造成滤波器发散。
相关研究表明,在卡尔曼滤波器中加入自适应模块能够缓解上述问题。目前普遍采用的自适应EKF算法有强跟踪自适应滤波器[18]、Sage-Husa自适应滤波算法[19]、模糊自适应卡尔曼滤波器[20]等。强跟踪自适应滤波器通过在协方差阵中加入衰减因子,使信息序列趋向相互垂直,并且在线调节滤波增益阵。此法对模型不确定系统以及参数时变系统表现出更好的鲁棒性。Sage-Husa自适应滤波算法设计噪声统计估计器估计噪声特性,并将统计信息用于最优预测,改善EKF对变噪声系统的估计性能。其基本使用方法有两种:一种是设置遗忘因子,对计算出的噪声统计信息进行加权处理;另一种是设置比例因子,将方差初值和估计值进行加权。后者在结果的震荡幅值上优于前者,并且可以利用比例因子对其性能进行灵活调整,整体性能更好[21]。
本文基于Sage-Husa算法进行改进,提出一种适用于含有差分GPS和视觉传感器,具有较高可靠性的自适应扩展卡尔曼滤波器。为验证此方案的可行性,本文以六轴无人机作为实验平台,使用ROS进行统筹计算和控制,并搭配GAZEBO仿真平台对自适应卡尔曼滤波器进行参数整定。自适应EKF算法由机载计算机实时计算,并可实时传输位置数据,有望实现天线主动面实时闭环修正。
1 机载传感器架构及系统模型简介
1.1 系统架构
本文所采用的模型有15个状态变量,如图1所示。滤波器一共有5个输入模块,分别对应惯性测量单元、高度计(气压计)、常规GPS、差分GPS和视觉传感器。飞控的加速度计、陀螺仪和地磁计一同组成IMU,提供对应信息,常规GPS作为辅助传感器,对其位置进行差分后作为速度观测量。差分GPS提供水平方向位置信息,视觉传感器提供水平位置和高度信息。上述传感器得到的数据分别导入常规EKF,单独使用差分GPS作为位置估计的常规EKF和本文提出的自适应EKF进行融合,并将自适应EKF的结果导入位置控制器进行闭环控制。

图1 导航系统架构示意图Fig.1 Navigation system structure diagram
1.2 系统模型
设从机体坐标系b到导航坐标系n的旋转矩阵为

式中,分别表示3个姿态角。本文采用的非线性模型转移公式如下:
式中:P代表位置向量,即E代表姿态角向量,即和分别为位置速度和加速度向量;为角速度向量;dt表示计算间隔时间。式(1)~(5)由牛顿运动定律配合三维旋转公式变换得到。
2 自适应卡尔曼滤波器
2.1 数据融合的时间策略
此自适应扩展卡尔曼滤波器主要解决两个问题:a. 充分利用差分GPS和视觉传感器,将数据进行有效融合;b. 增加数据密度,提高系统实时性。由表1可知,各传感器的数据频率和精度各不相同。精度较高的双目视觉里程计和差分GPS,其频率只有5 Hz,而气压计和IMU为30 Hz。如果让EKF等待所有数据到达才计算,将不能满足系统实时性以及数据密度的要求。考虑到机载计算机的计算能力,通过实验发现,卡尔曼滤波器工作频率为20 Hz时最高效。
本文对如下两种时间策略进行了对比:
a. 仅使用差分GPS数据作为绝对位置数据,在中途的运算过程中,RTK没有更新数据,则认为观测数据不变;
b. 间隔采用差分GPS和视觉里程计的加权平均数据(当前时刻数据权重0.9,上一时刻数据权重 0.1)。
对于第二种策略,系统每一个完整运行周期为0.2 s,图2为其运行示意图。30.1 s时,差分GPS数据更新,并与上一时刻视觉里程计数据加权平均后作为观测值;30.15 s时,传统GPS数据更新,采用30.1 s的加权平均值作为位置观测数据;30.2 s时,视觉里程计的数据更新,与30.1 s差分GPS数据加权平均,作为位置观测数据;30.25 s时,传统GPS数据更新,采用30.2 s采集的加权平均值作为观测数据,至此完成一个运行周期。此策略相当于用2个5 Hz传感器合成1个10 Hz传感器。

表1 传感器静态测试性能数据Tab.1 Static test performance data of the sensor

图2 时间策略运行示意图Fig.2 Time strategy running diagram
2.2 数据震荡问题
若使用常规EKF,为了让融合结果向正确结果收敛,差分GPS和视觉里程计的过程噪声方差设置值应当远小于传统GPS和气压计。两个高精度传感器的权重相近,但它们的数据并不总是相近。因此滤波器输出值可能会在差分GPS和双目视觉传感器的数据之间震荡,如图3所示。
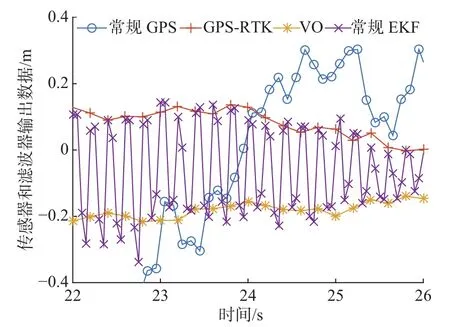
图3 数据震荡示意图Fig.3 Data concussion diagram
此外,GPS信号还非常容易受环境影响。如果测量噪声方差阵为常量,则当差分GPS数据发生较大变动时,系统输出值将随之偏离正确值,无法收敛。
在测量过程中,差分GPS和视觉里程计的数据会随机地相互靠近或远离。间隔采用差分GPS和视觉里程计本质上是给观测值加入时变噪声,使之成为变噪声序列。
2.3 自适应扩展卡尔曼滤波器
为了解决上述问题,充分利用差分GPS和视觉里程计的数据,必须在常规EKF中加入改进的带噪声统计估计器的Sage-Husa自适应滤波器。
文献[17]给出了Sage-Husa提出的无偏递推噪声统计估计器公式,系统噪声方差估计公式为

式中:k表示时刻;为k时刻系统噪声协方差矩阵最优预测值;为k时刻卡尔曼增益矩阵;为测量残差一步预测值;为k时刻协方差矩阵最优预测值;为非线性系统方程的泰勒展开一阶项对应的转移矩阵。
测量噪声方差估计为

式中:为k时刻系统测量噪声协方差矩阵最优预测值;为非线性测量方程的雅可比矩阵。
式(6)~(7)的本质是对噪声统计信息进行算术平均。随着k增大,测量噪声和系统噪声都将趋于某固定值。此值包含前k个时刻的噪声统计特性,对噪声的估计表现出较好的性能。由于输入的观测值带有时变噪声,因而当噪声变动时,此估计器不能快速跟踪噪声变化。从优化性能考虑,应当重视新近数据。现将改进的自适应算法详述如下。
设系统方程:

式中:是系统k时刻状态向量;是系统k时刻测量向量;表示系统非线性方程;表示测量方程;为系统噪声序列;为测量噪声。满足的条件为
式中:E表示期望;cov表示协方差;为k时刻系统噪声最优预测值;为k时刻测量噪声最优预测值;为
将式(6)~(7)简化后可得
传感器采样全周期(所有传感器都更新一次数据)为0.2 s,而卡尔曼滤波器运行周期为0.05 s。因此希望当前时刻的噪声计算受到前3个时刻的影响。用a1和a2分别表示对测量噪声协方差阵和过程噪声协方差阵添加的比例因子,将Sage-Husa采用的公式改进如下:
式中,为按照简化后的Sage-Husa噪声统计公式进行计算的最优预测值作为初值,其取值与常规EKF采用的系统和测量协方差阵相同。对于两个矩阵,由于以4次卡尔曼滤波器计算为周期进行,所以在计算这两个矩阵时加入前面3次计算的结果,进行平均。实验发现,此自适应EKF的初值敏感程度低于常规EKF,只要比例因子a1和a2设置恰当,此噪声模型会自动调节。
此卡尔曼滤波器的运行过程与常规扩展卡尔曼滤波器相似,只是在传统方法的基础上增加了噪声统计估计器相关项(考虑到机载运算能力,本文直接采用线性化方程进行计算)。
a. 预测阶段。
在状态一步预测时加入系统噪声预测:

在协方差一步预测时加入系统噪声方差估计:

其中,和由上一轮对实变噪声统计计算得到。
b. 更新阶段。
计算最优卡尔曼增益阵时加入测量噪声方差预测:


和为上一轮计算得到的测量噪声估计值。
最后进行最优状态估计与协方差更新,与常规卡尔曼滤波相同。

3 多传感器数据融合实验
3.1 仿真实验
仿真时同时运行3种滤波器:采用第二种时间策略的常规EKF;采用第一种时间策略、仅使用差分GPS数据的常规EKF;采用第二种时间策略的自适应EKF。后文将它们分别简称为常规滤波器、差分GPS常规滤波器和自适应滤波器。
仿真过程中,在真值基础上加入与真实传感器特性相同的噪声作为测量值。图4为仿真情况下的设定轨迹、真实轨迹和滤波器输出轨迹的三维对比图。
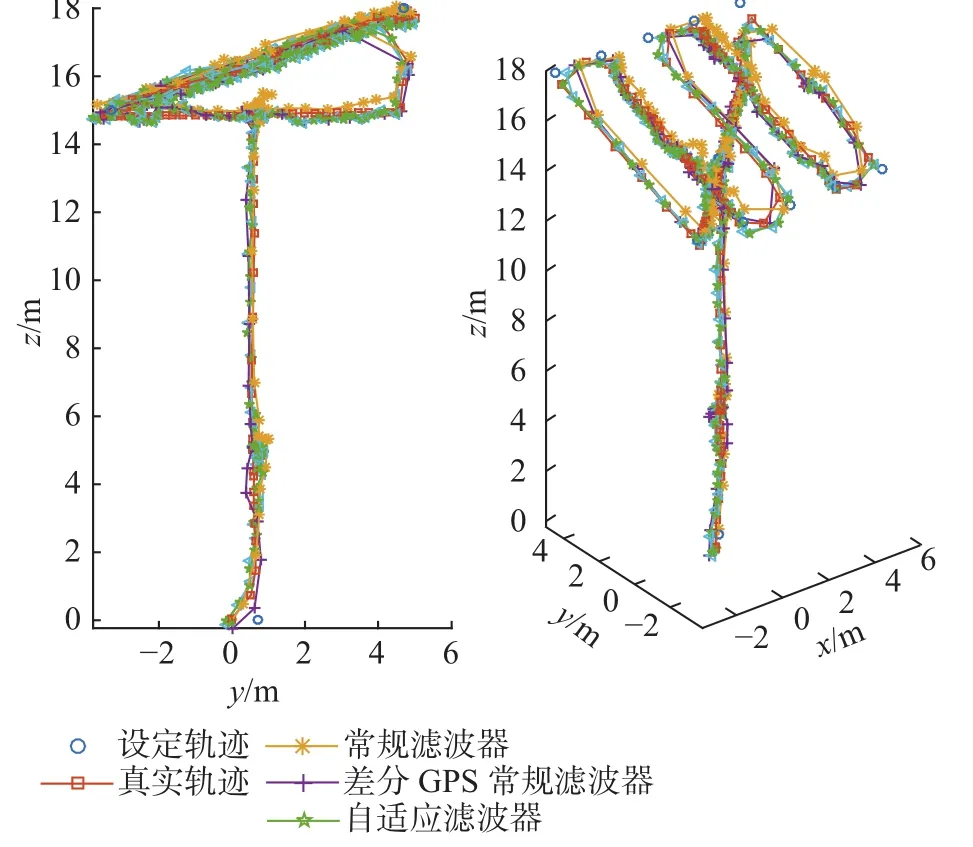
图4 仿真轨迹图Fig.4 Trajectories in the simulation
考虑天线工作时口径面为一斜面,因而将测试轨迹设置在一个与口径面平行的斜面上,如YZ坐标系的图像(图4左图)所示。经过多组仿真实验可知,当a1=0.05~0.07,a2=0.05~0.06时,自适应滤波器效果最好。图5是各传感器和滤波器输出的X轴位置随时间变化的曲线。

图5 仿真实验X轴输出对比图Fig.5 Comparison of the X-axis simulation outputs
将74~79 s的图像放大,如图6所示。虚线表示常规滤波器数据在两个传感器之间震荡。差分GPS常规滤波器输出数据仅在差分GPS数据周围波动,精度反而不如直接测量结果。受益于噪声估计器,图中最贴近真实轨迹的实线便是自适应滤波器数据。表2是仿真阶段各传感器和滤波器输出数据误差的统计信息。
标准差的柱状对比图如图7所示。从误差标准差数据可以看出自适应滤波器在X,Y,Z 这3轴的数据波动最小,最贴近真实值。表2 仿真数据误差统计信息
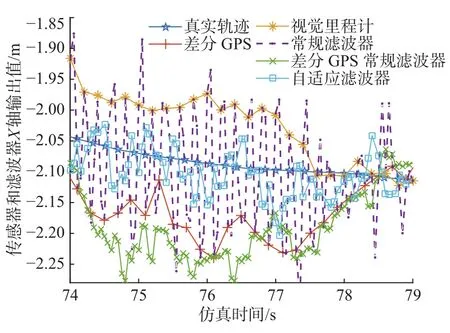
图6 仿真实验X轴输出放大图Fig.6 Enlarged figure of X-axis simulation outputs
Tab.2 Error statistic information in the simulation
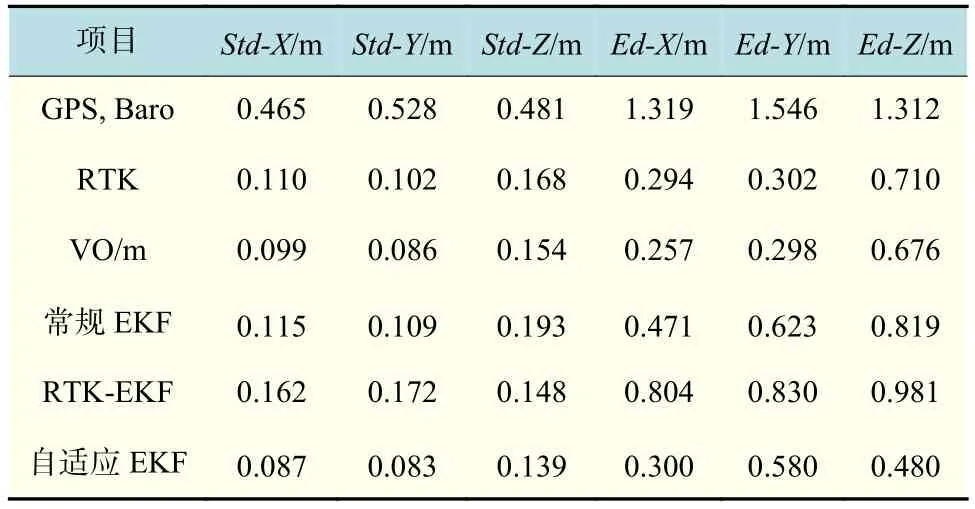
注:表中RTK-EKF即差分GPS常规滤波器。
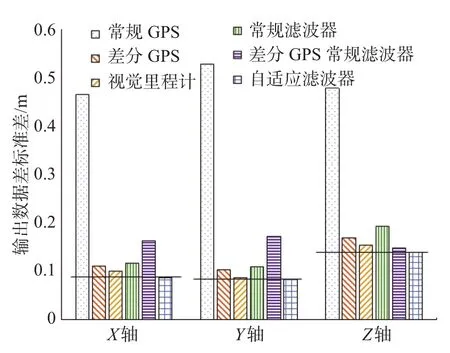
图7 误差标准差对比图Fig.7 Comparison of MSE
3.2 实际飞行测试
本文采用的实验平台如图8所示。由于飞机的计算能力有限,在实际飞行测试时只在飞机上运行自适应滤波器程序。无人机在测量时依照航点飞行,航点间隔0.2 m,在航点之间会以非常缓慢的速度飞行。图9~10便是在此真实测量状态下的轨迹(图9为俯视图,图10为左视图)。由于飞行缓慢,加上风扰,导致真实飞行轨迹与设定航迹之间偏差最大达到1 m左右。

图8 六轴无人机实验平台Fig.8 Six-axis UAV experimental platform
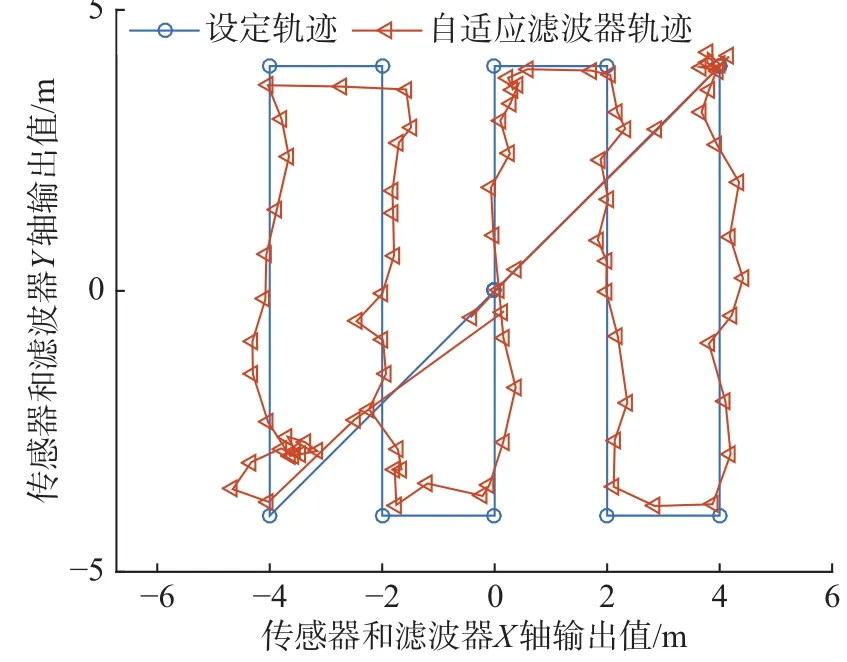
图9 设定轨迹与滤波器输出轨迹对比(X-Y轴)Fig.9 Comparison of the preset trajectory and filter output trajectory (X-Y Axis)

图10 设定轨迹与滤波器输出轨迹对比(Y-Z轴)Fig.10 Comparison of the preset trajectory and filter output trajectory (Y-Z Axis)
图11 则是飞机在不设置航点,连续飞行时测得的X轴各传感器和滤波器输出值对比图和轨迹俯视图(右上角小图)。其中,差分GPS常规滤波器和自适应滤波器数据使用采集数据离线运行得到。由图11可知常规滤波器效果与仿真相似,即在差分GPS和视觉里程计间震荡。差分GPS常规滤波器的数据仅受差分GPS的影响,而自适应滤波器的数值在差分GPS和视觉里程计之间,曲线较平滑。
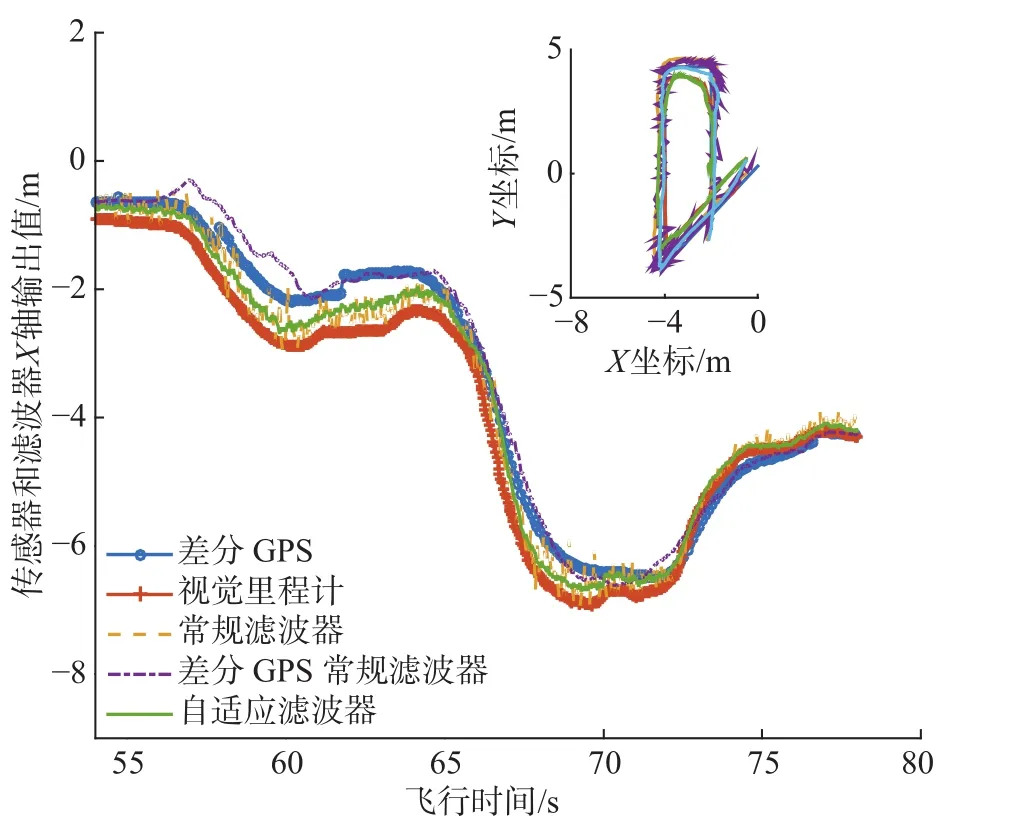
图11 连续飞行实验X轴输出对比Fig.11 Comparison of X-axis outputs in the continuous flight test
3.3 弱GPS信号的实验数据分析
在楼宇间的空旷场地进行弱GPS信号条件下的实验(考虑到实验的危险性,此实验只在地面移动飞机),测得X轴数据随时间变动的图像如图12所示。
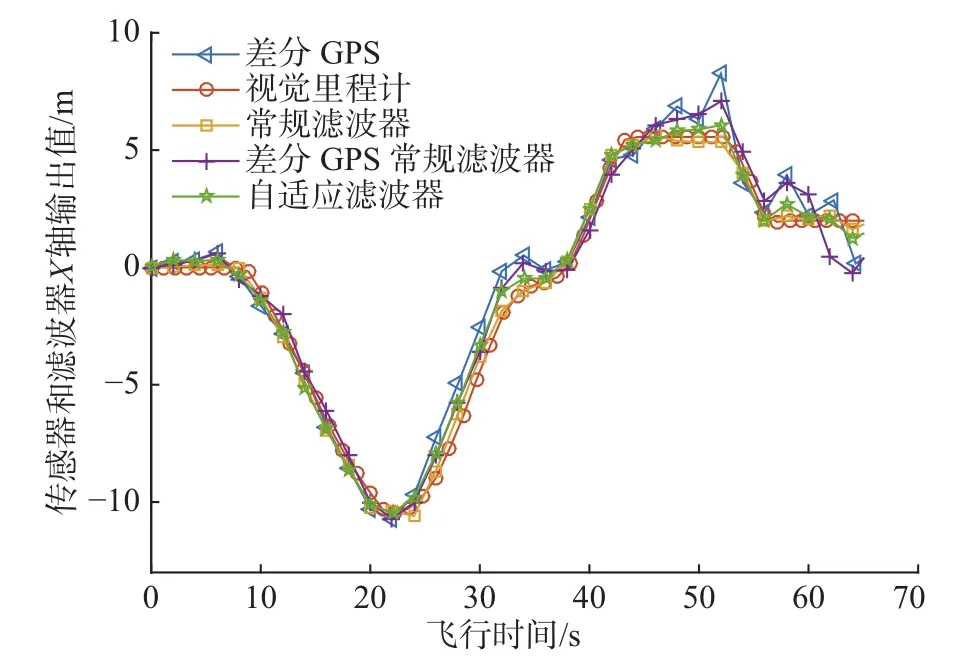
图12 弱GPS信号实验X轴输出对比Fig.12 Comparison of X-axis outputs in the weak GPS signal test
楼宇对GPS信号影响较大,由图12可知差分GPS和常规GPS数据都出现一定波动,甚至丢失信号。此时可信度最高的数据为视觉里程计。由图13可知,当差分GPS数据剧烈波动时,差分GPS常规滤波器依然跟随它,导致较大的数据偏差。而由于加入了自适应噪声调整模块,虽然仍受一定影响,但自适应滤波器的数据更加趋向于稳定的视觉里程计。此情况间接表明,自适应滤波器能够在某传感器数据出现波动时趋向更加可信的数据,从而保证了位置测量精度和系统可靠性。

图13 弱GPS信号实验X轴输出放大图Fig.13 Enlarged figure of comparison of X-axis outputs in the weak GPS signal test
4 结 论
本文从工程应用角度出发,为满足天线主动面实时闭环修正要求,针对差分GPS和视觉里程计两种外部传感器数据频率低,GPS信号容易被天线遮挡而受干扰的问题,提出一种用于无人机的多传感器导航方案。此方案对Sage-Husa自适应扩展卡尔曼滤波器进行改进,内容包括传感器数据输入的时间策略、噪声统计特性算法,并通过仿真和实际飞行测试对系统的实际导航性能进行了对比验证,结论如下:
a. 自适应扩展卡尔曼滤波器通过融合各种传感器信息,将数据频率提高到20 Hz,并结合自动控制系统实现沿设定轨迹自动飞行,基本能够满足天线测量需要。
b. 弱GPS信号情况下的测试结果表明,自适应滤波器和视觉传感器的组合能够在一定程度上缓解差分GPS数据波动对系统造成的影响,其可靠性明显优于常规卡尔曼滤波器。
c. 本文对比了常规卡尔曼滤波器和改进的自适应滤波器。由于自适应模块加入,自适应滤波器在充分利用了高精度传感器的基础上,数据精度、稳定性和可靠性方面都优于常规滤波器。
参考文献:
[1]王娜. 新疆奇台110米射电望远镜[J]. 中国科学: 物理学力学 天文学, 2014, 44(8): 783-794.
[2]BAARS J W M, LUCAS R, MANGUM J G, et al. Nearfield radio holography of large reflector antennas[J]. IEEE Antennas and Propagation Magazine, 2007, 49(5): 24-41.
[3]LUO C B, MCCLEAN S I, PARR G, et al. UAV position estimation and collision avoidance using the extended Kalman filter[J]. IEEE Transactions on Vehicular Technology, 2013, 62(6): 2749-2762.
[4]ANGELINO C V, BARANIELLO V R, CICALA L. UAV position and attitude estimation using IMU, GNSS and camera[C]//Proceedings of the 2012 15th International Conference on Information Fusion. Singapore: IEEE,2012: 735-742.
[5]KIM J, SUKKARIEH S. Real-time implementation of airborne inertial-SLAM[J]. Robotics and Autonomous Systems, 2007, 55(1): 62-71.
[6]周璠, 郑伟, 汪增福. 基于多异类传感器信息融合的微型多旋翼无人机实时运动估计[J]. 机器人, 2015, 37(1):94-101.
[7]夏凌楠, 张波, 王营冠, 等. 基于惯性传感器和视觉里程计的机器人定位[J]. 仪器仪表学报, 2013, 34(1):166-172.
[8]曹美会, 鲜斌, 张旭, 等. 基于视觉的四旋翼无人机自主定位与控制系统[J]. 信息与控制, 2015, 44(2): 190-196.
[9]谢德胜, 徐友春, 万剑, 等. 基于RTK-GPS的轮式移动机器人轨迹跟随控制[J]. 机器人, 2017, 39(2): 221-229.
[10]RIGATOS G G. Nonlinear Kalman filters and particle filters for integrated navigation of unmanned aerial vehicles[J]. Robotics and Autonomous Systems, 2012,60(7): 978-995.
[11]HIDE C, MOORE T, SMITH M. Adaptive Kalman filtering for low-cost INS/GPS[J]. Journal of Navigation,2003, 56(1): 143-152.
[12]刘洪剑, 王耀南, 谭建豪, 等. 一种旋翼无人机组合导航系统设计及应用[J]. 传感技术学报, 2017, 30(2):331-336.
[13]安雷, 张国良, 张维平, 等. 移动机器人扩展卡尔曼滤波定位与传感器误差建模[J]. 信息与控制, 2012, 41(4):406-412.
[14]ABD RABBOU M, EL-RABBANY A. Non-linear filtering for precise point positioning GPS/INS integration[J]. IPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2014, XL-2: 127-132.
[15]王龙, 章政, 王立. 改进扩展卡尔曼滤波的四旋翼姿态估计算法[J]. 计算机应用, 2017, 37(4): 1122-1128.
[16]田易, 孙金海, 李金海, 等. 航姿参考系统中一种自适应卡尔曼滤波算法[J]. 西安电子科技大学学报, 2011,38(6): 103-107, 122.
[17]魏伟, 秦永元, 张晓冬, 等. 卡尔曼滤波系统和量测噪声自适应估计的关联性[J]. 测控技术, 2012, 31(12):98-103.
[18]YIN Z G, LI G Y, DU C, et al. An adaptive speed estimation method based on a strong tracking extended Kalman filter with a least-square algorithm for induction motors[J]. Journal of Power Electronics, 2017, 17(1):149-160.
[19]SAGE A P, HUSA G W. Algorithms for sequential adaptive estimation of prior statistics[C]//Proceedings of 1969 IEEE Symposium on Adaptive Processes (8th)Decision and Control. University Park, PA, USA: IEEE,1969.
[20]TSENG C H, LIN S F, JWO D J. Fuzzy adaptive cubature Kalman filter for integrated navigation systems[J]. Sensors,2016, 16(8): 1167.
[21]魏伟, 秦永元, 张晓冬, 等. 对Sage-Husa算法的改进[J].中国惯性技术学报, 2012, 20(6): 678-686.
猜你喜欢
数学杂志(2022年5期)2022-12-02
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年8期)2022-08-31
湘潭大学自然科学学报(2022年2期)2022-07-28
新世纪智能(数学备考)(2021年5期)2021-07-28
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
导航定位与授时(2016年6期)2016-03-16