基于HALCON的透明玻璃边缘提取方法研究
2018-05-17 06:02高子鑫李兆同
电子测试 2018年8期
高子鑫, 李兆同
(上海理工大学光电信息与计算机工程学院,上海 ,200093)
0 引言
在现代工业检测中,工业零件测量越来越重要,所以,准确的提取零件边缘是必不可少的一个环节。在透明玻璃的检测中,由于透明玻璃会产生阴影边缘,所以在提取其边缘时,采取有效方法排除阴影边缘产生的干扰尤为重要。在传统方法中,先用Roberts算子、Sobel算子、Prewitt算子、Laplacan算子等[1],提取边缘,然后进行图像增强,提高真边缘和阴影产生的干扰边缘的对比度,然后阈值选出透明玻璃真边缘,但是这种方法鲁棒性较差。
本文在传统提取边缘的方法基础上,提出了一种的基于灰度差值的方法来排除阴影边缘产生的干扰,获得透明玻璃真边缘。经过与传统方法实验对比分析,基于灰度差的方法不仅成功的提取了透明玻璃边缘,而且还具有很高的鲁棒性。
1 图像预处理
图像预处理在数字图像处理中占有重要位置,其作用是为下面的图像处理做准备。本文用德国著名机器视觉厂商MVtec公司开发的一套有完善的数字图像处理的机器视觉软件HALCON对图像进行处理。它不仅提供功能全面的视觉处理库,而且还提供了几乎所有的最先进和最新的技术算法和算子,其包含了一千多个独立的函数[2]。目前该软件广泛应用于工业自动化监测检测、遥感探测、遥感监控、医学图像的分析等方面。由于HALCON软件为我们提供了较好的界面窗口,可以直接读取透明玻璃图像。

图1 透明玻璃图像

图2 阴影产生的干扰边缘和真边缘
1.1 把彩色图像RGB转化成单通道灰度图像
对图像处理而言, RGB是最为重要和常见的颜色模型, 它建立在笛卡尔坐标系中[3]。RGB颜色空间就是说图像上的每一个像素由R(红色)、G(绿色)、B(蓝色)来表示,这三种色也叫三基色,三种基色是相互独立的[4]。自然界的任何颜色都可以用它们的组合来表示,那么24比特位彩色图像用RGB颜色空间描述的话,就是每个像素由8位的R分量,8位的G分量,8位的B分量。其中黑色位于原点处,白色离位于原点最远角上,并且每一通道的灰度值范围都是0-255,下图是归一化后的彩色模型,其值都在[0,1]范围内。

图3 RGB彩色模型
上图的三个坐标轴分别是R,G,B通道,空间上每一点的颜色值就取决于这三个坐标值的大小,并且由它们各自的大小共同构成像素的颜色值,这就是RGB三坐标的含义。在HALCON中,用decompose3(Image,R,G,B)把发票图像分成R、G、B三个单通道图像,对比之后选取R通道图像。
1.2 图像增强
按特定的需求将图像中感兴趣的特征有选择的突出,减少或降低不需要的特征,提高图像的可分析度是图像增强的主要内容。图像增强的目的主要有两个:一是改善图像的视觉效果,提高图像的清晰度;二是将图像转化成一种更适于人类或机器进行分析处理的形式[5]。
f( x, y) f( x, y) g( x, y)首先对R通道图像进行图像均值滤波。均值滤波是一种局部空间域的处理算法,均值滤波对噪声进行了求均值运算, 在某种程度上对噪声进行了平滑[6]。设原始图像是,对的每个像素点取一个领域S,计算中所有像素的灰度级的平均值,将其作为领域平均处理后的图像的像素值。即

g( x, y) f( x, y)式中S是预先确定的领域,M为领域S中像素的点数。当然均值滤波也可用空间卷积的方式来描述,把平均化处理看做是一个作用于大小为M×N图像h(r, s)上低通滤波器,该滤波器的脉冲响应是m×n阵列[5]。于是滤波器输出的图像为可以用卷积表示:

其中 F ( X, Y ) 增强后的图像结果,T是对比度系数。通过图像增强,从而使图像的对比度增强[7]。
1.3 提取亚像素边缘
亚像素边缘检测技术是一种新的高精度的图像边缘处理与检测技术,其本质是通过软件算法来人为地提高检测系统的分辨率[8]。目前几种常用的亚像素边缘提取方法,包括空间矩法、灰度矩法、Zernike 矩法和数字相关法等。亚像素级边缘和像素级边缘对比,如图4所示。

图4 亚像素级边缘和像素级边缘
在HALCON中用算子edges_sub_pix可直接获得亚像素级精度边缘。
2 提取透明玻璃真边缘
透明玻璃的阴影会产生干扰边缘,为了准确的获得玻璃真边缘,有以下两种方法:一种是传统方法,一种是本文提出的基于边缘线两边灰度差值的新方法。
2.1 传统方法
传统方法是先提取边缘轮廓线,然后通过图像,来增大阴影边缘线和真边缘线之间的对比度,抑制玻璃阴影产生的干扰边缘,最后通过阈值分割和特征选择获得透明玻璃真边缘。

图5 传统方法流程
2.2 基于灰度差的方法
通常在灰度图像中, 目标内部的灰度值一般是连续变化的, 而其边缘两侧的灰度值则存在较大的突变。基于灰度差值的方法利用这种特性来实现的。首先对图像进行增强,扩大图像对比度,然后提取其亚像素边缘轮廓,最后,计算提取的每条边缘轮廓线两边的灰度差值,通过对比灰度差值来排除阴影产生的干扰边缘,获得透明玻璃真边缘。
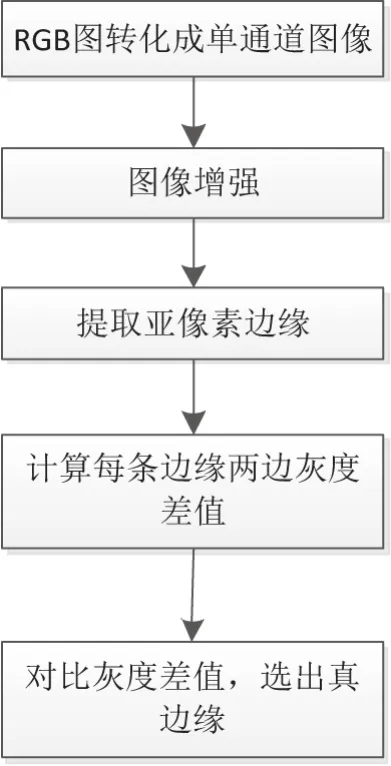
图6 基于灰度差值方法
在HALCON中利用算get_grayval_contour_xld来计算边缘线两边的灰度差值,然后通过比较灰度差值大小来排除阴影产生的干扰边缘,获得透明玻璃真边缘。结果如下图中红色线部分。

图7 基于灰度差值方法提取真边缘
3 实验结果对比分析
以下是对透明玻璃图像分别采用传统的方法和基于灰度差值的方法进行边缘提取,能正确提取边缘图像张数的结果统计表格。

表1 正确提取边缘结果数据
从表中可以看出。传统方法只能对一小部分透明玻璃图像提取边缘,而基于灰度差值的方法能提取绝大部分透明玻璃图像的边缘。
4 结语
通过对比分析,本文提出的基于灰度差值的方法能够很好的排除透明玻璃阴影产生的干扰边缘,获得真边缘,并且鲁棒性很高。但是由于本次实验的样本数量不大,其方法还有待进一步优化。
参考文献
[1]王文丽.各种图像边缘提取算法的研究[D].北京交通大学,2010.
[2]金贝.基于HALCON 的机器视觉教学实验系统设计[D].北京:北京交通大学,2012:1- 29.
[3]杨璟,朱雷. 基于RGB颜色空间的彩色图像分割方法[J].计算机与现代化,2010,08:147-149+171.
[4]王一冰.基于机器视觉的玻璃瓶缺陷检测与抓取系统研究[D].长春工业大学,2016.
[5]谢凤英.数字图像处理及应用[M].北京:电子工业出版社,2014.6.
[6]吴建华,李迟生,周卫星.中值滤波与均值滤波的去噪性能比较[J].南昌大学学报(工科版),1998,01:33-36+62.
[7]史玉林,李飞飞,孙益顶. 基于均值滤波和小波分析的图像去噪[J].电子测量技术,2008,08:140-142+157.
[8]杨兵兵.亚像素图像边缘检测方法研究[D].大连理工大学.2015.
猜你喜欢
数学物理学报(2021年2期)2021-06-09
高师理科学刊(2020年2期)2020-11-26
文苑(2020年11期)2020-11-19
应用数学(2020年2期)2020-06-24
中国诗歌(2019年6期)2019-11-15
数学年刊A辑(中文版)(2018年2期)2019-01-08
中成药(2017年6期)2017-06-13
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数学物理学报(2016年3期)2016-12-01
数学大王·中高年级(2016年4期)2016-05-14