机扫加电扫复合跟踪模型及仿真分析
2018-05-17 06:02王成
电子测试 2018年8期
王成
(91245部队4分队,辽宁葫芦岛,125000)
0 引言
相控阵雷达具备突出的多目标跟踪能力,目前已经广泛应用在导弹防御、航天及常规靶场测控系统中。为了弥补电波束搜索空域的不足,系统设计时将相控阵电波束扫描和精密天线座机械扫描相结合,在保证高精度跟踪目标的同时实现半球空域覆盖,扩大搜索跟踪范围,完成多目标的捕获跟踪。此种方式称之为机械扫描加电波束扫的复合跟踪方式,简称机扫加电扫复合跟踪。
机扫加电扫主要有三种模式:(1)相控阵与机械复合自动跟踪主目标:此种跟踪方式下,相控阵电子回路及天线法线机械回路同时闭合,阵面法线通常对准主目标,主要是为了保证对主目标的连续跟踪。(2)相控阵自动跟踪多目标中心:此种跟踪方式下,将多个目标的角度重心作为相控阵天线法线跟踪的对象,机械和电波束回路同时闭合,主要是为了最大限度的保证对多个目标的连续跟踪。(3)相控阵手控跟踪:在相控阵手控跟踪下,天线机械回路手控控制,电波束回路自动跟踪,一般在搜索目标和早期跟踪时采用此种方式。

图1 雷达坐标系
1 坐标系转换
相控阵测量雷达数据处理过程中涉及到的坐标系主要包括阵面余弦坐标系、阵面直角坐标系和球坐标系。三种坐标系定义如图1所示。
Az为球坐标系下目标方位角;E为球坐标系下目标俯仰角;Nt为正北与垂直于阵面的平面之间夹角;T为阵面的倾斜角。
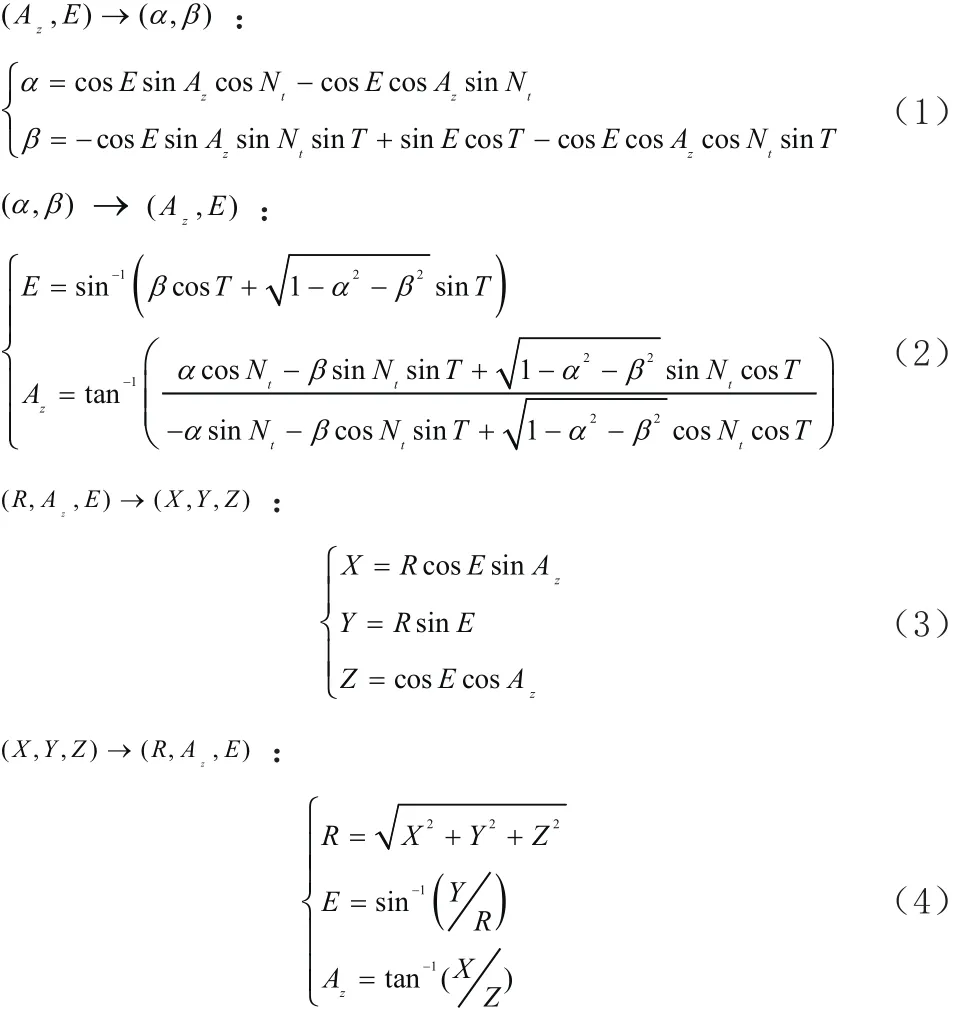
各坐标系之间转换公式如下:
2 跟踪控制方式
在相控阵测量雷达复合跟踪过程中,主控机完成目标跟踪回路闭合,同时控制伺服方位和俯仰机构运动。在相控阵与机械复合自动跟踪主目标的工作方式下,主控机在球坐标系下闭合角度回路,完成对主目标的角度闭环跟踪,计算出主目标在球坐标下的位置(Az,E),并将(A,E)作为控制量发给伺服系统,保证天线阵面法线始终跟踪主目标;跟踪目标位置以及实时获得天线的方位和俯仰角编码(Nt,T)计算出波控码,控制电波束指向主目标。工作原理如图2所示。

图2 相控阵自动跟踪多目标中心原理图
相控阵自动跟踪多目标中心、相控阵手控跟踪过程与控阵与机械复合自动跟踪主目标类似,主要区别在于伺服控制量的生成。
3 码盘精度对目标跟踪误差的影响
目标跟踪过程中,主控机根据照射波位以及目标角度误差,完成目标角度回路的闭合,生成目标角度滤波值和预测值。同时,主控机读取当前时刻的伺服码盘值,根据预测的目标角度信息,生成下周期控制波束照射的波控码。由公式(1)、(2)可知,在目标跟踪过程中,码盘读取的误差会直接影响到目标角度指向,从而影响目标角度跟踪误差。对码盘噪声误差对系统精度的影响进行了仿真分析。通过100次蒙特卡洛仿真,统计了伺服码盘精度引起的角度跟踪误差,见表1。
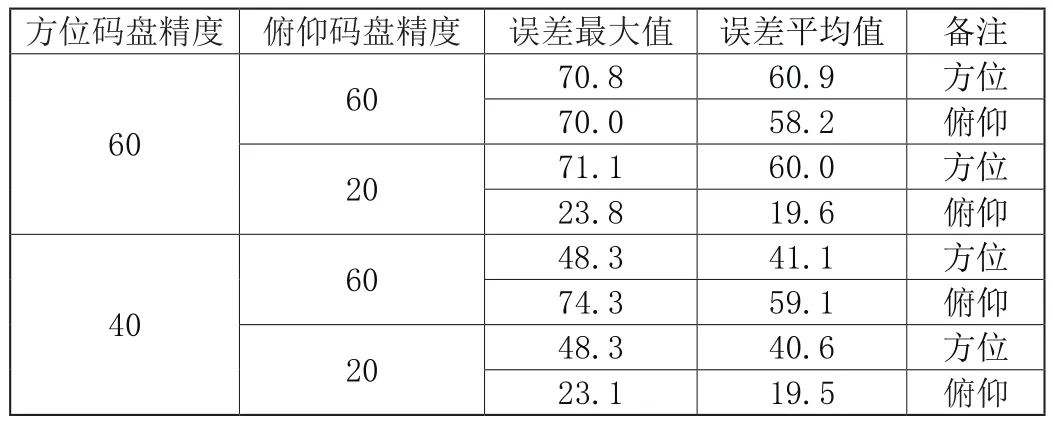
表1 码盘精度对角跟踪误差的影响 单位:秒
4 机扫加电扫复合跟踪模型
(1)目标航路模型
假设目标的运动是等速、等高的直线运动,已知R0是目标向雷达方向运动的最大距离,单位为m,V是目标运动的速度,单位为m/s,P是航路捷径,单位为m,H是目标的高度,单位为m,A是方位角、E是仰角,单位为弧度,则运动方程可下式给出:


(2)角误差提取模型
采用比幅单脉冲测角方法测角。理想情况下天线形成的波束A和B可用如下公式表达:

其中:k=2.783是和天线半功率点有关的常数;波束分离角θpa≅0.4×θ3,θ3是天线波束半功率点的宽度,提取的角误差信号公式如下:
式中符号Re表示在计算结果中只选取复数的实数部分。
(3)伺服控制模型
机扫加电扫复合跟踪雷达的伺服系统为随动系统,这就要求伺服具有快速响应特性、高跟踪精度和宽调速范围。雷达伺服系统一般都使用电流回路、速度回路、位置回路的三回路的闭环控制方式。
三闭环位置随动系统的简化框图如图3所示,其中Guide_P为期望位置,APR、ASR、ACR 分别代表位置、速度、电流校正环节。

图3 三闭环随动系统简化模型
某雷达伺服系统连续时间传递函数如下:

该伺服系统对应方位和俯仰阶跃响应如图4所示。
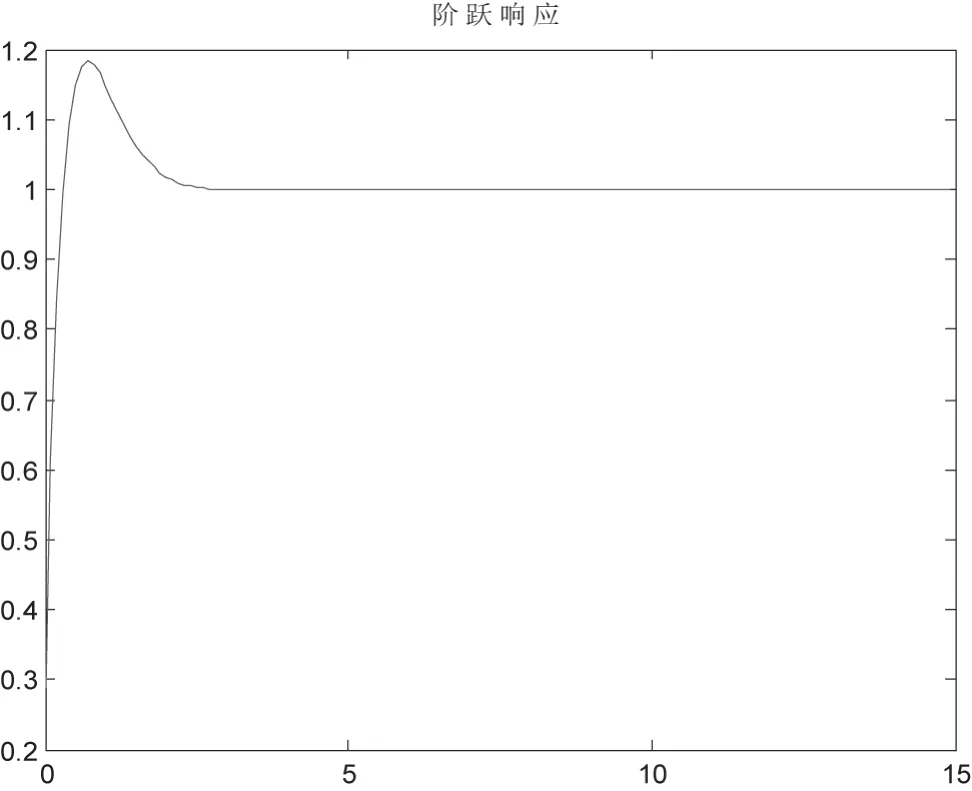
图4 伺服系统方位和俯仰阶跃响应
(4)回路闭合模型
相控阵雷达在复合跟踪时,涉及到两个回路:电扫描回路和伺服控制回路。电扫描角度回路闭合时,既可在阵面余弦坐标系下闭合,也可在球坐标系下闭合,波束回路闭合一般采用α−β滤波器来实现。主控在跟踪过程中将控制量发给伺服系统,伺服系统驱动天线掉转。
α−β滤波器是相控阵雷达常用的一种滤波器,它的优点是简单,适应性较强,易于工程实现,滤波器的方程如下:

值,是K时刻的测量值,是K时刻的速度平滑值,T是滤波周期,α和β是滤波器的系数。
5 仿真分析结果
目标参数为初始距离50km、航捷为10 km、飞行高度4.5 km、绝对飞行速度为1.5km/s。目标角度、角速度、角加速度变化曲线,如图5所示。

图5 (a) 目标方位和俯仰角变化曲线
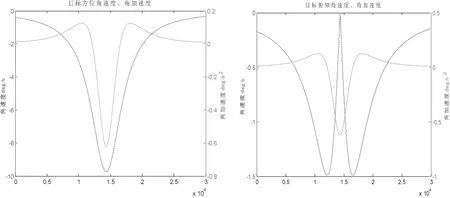
图5 (b) 目标角速度、角加速度变化曲线
跟踪过程中,球坐标系下进行角度回路闭合,采用相控阵自动跟踪主目标工作方式。角度跟踪误差与目标运动角加速度之间的关系如图6所示。
目标跟踪过程中,伺服方位和俯仰滞后量与角加速度之间的关系见图7。

图6 角误差与加速度关系曲线

图7 伺服滞后量与角加速度关系
目标运动速度较快,伺服方位和俯仰随动有滞后,造成了伺服位置滞后。由于雷达系统采用了机扫加电扫的复合跟踪模式,电波束扫描弥补了伺服动态特性的不足,保证了目标连续跟踪,目标跟踪航迹如图8所示。

图8 复合跟踪目标测量值
6 结束语
本文主要介绍了相控阵雷达机扫加电扫跟踪的三种工作方模式,对雷达目标航路、角误差提取模型、伺服控制模型、系统跟踪过程进行建模,仿真分析了机扫加电扫复合跟踪效果,并对影响相控阵电扫描跟踪的角度随机误差项进行分析,对主控机回路闭合算法和工作流程进行了简要介绍。可作为雷达系统进行设计时的参考。
参考文献
[1]黄槐,齐润东,文树梁.制导雷达技术[M].北京:电子机械工业出版社,2006.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
电子机械工程(2022年2期)2022-04-25
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
舰船电子对抗(2021年1期)2021-04-15
电子制作(2019年24期)2019-02-23
测控技术(2018年12期)2018-11-25
电子测试(2018年15期)2018-09-26
系统工程与电子技术(2016年4期)2016-08-24
北京航空航天大学学报(2016年4期)2016-02-27