
基于模糊控制的光伏发电双FLC控制器设计
2018-05-17 01:02秦正林邓运化寇宇峰
电力科学与工程 2018年4期
秦正林, 邓运化, 寇宇峰
(1. 山东中实易通集团有限公司,山东 济南 250000;2. 国网辽宁省电力有限公司 检修分公司,辽宁 沈阳 110000)
0 引言
随着我国经济的持续中高速发展,用电负荷不断增长。同时一次能源的日益短缺和全球性环境问题的日益暴露也给以火力发电为主体的能源消费模式带来了巨大的挑战[1-2]。光伏发电技术因其能源分布的广泛性和发电过程中的零污染性而得到学术界的广泛研究。
但光伏发电因其能源属性的不确定性而存在弊端,光伏电池板上所接受的光照强度对其发电功率有决定作用,因此光伏发电输出因天气的不确定性而具有随机性,该随机性给光伏并网运行带来了挑战。如何在光照不确定性的前提下,实现清洁能源的最大程度利用,已经成为了当前学者研究的热门问题[3]。
关于光伏最大程度发电的控制研究,必须以对光伏电池板输出特性的深入研究为基础。文献[4]对单硅晶光伏电池输出特性进行了详细介绍,并给出了不同光照强度下光伏电池板的输出特性,即在光照强度确定的条件下,光伏电池板的有功功率—直流工作电压曲线(Ppv-Upv曲线)是一条具有单峰值的曲线。可通过对并网换流结构的控制,调节光伏电池板的出口工作电压Upv,改变光伏电池板的输出功率Ppv。当调节光伏电池板的工作电压,使其对应输出功率为该光照强度下的曲线峰值时,此时的工作电压即为最大功率点电压。但随着光照强度的变化,最大功率对应的电压值也不同,通过控制策略使光伏电池板的出口工作电压追踪最大功率点对应的电压值,即能实现功率的最大输出,该方法又被成为最大功率点追踪法(Maximum Power Point Tracking,简称MPPT)[5]。
光伏发电的MPPT控制法因能实现新能源的最大可能出力而得到该领域学者的广泛关注和研究。文献[6]基于对光伏电池板输出特性的研究指出,不同光照条件下最大功率点电压值变化不大,将电压控制在该值,基本可以保证光伏输出在最大功率点附近,称为“固定电压法”。但固定电压法对最大功率点缺乏跟踪性,因此不能很好地适用于光照强度频繁改变的环境。文献[7-9]设计控制器持续给系统以一定步长的较小扰动量,该扰动量可以是系统的工作电压偏量、工作电流偏量或者占空比偏量,然后通过输出功率反馈或电流电压增量反馈,与前一步数值进行比较,决定后一步扰动的方向,称为“扰动观察法”,即当前应用最广泛的MPPT控制策略。但该控制策略以扰动和方向判断作为追踪的基本手段,其稳态扰动不可消除,加之光照条件的变化引发输出功率的瞬态变化,当DC/DC电路控制器和并网逆变器控制器设计不当时,易造成输出电压振荡和功率大幅波动,为并网运行的稳定性带来隐患[10]。当前光伏并网DC/DC电路和并网逆变器的控制主要采用结构简单、成本低廉的PI控制器。该控制器的参数具有固定性,不能兼顾大扰动时的调节快速性和小扰动下的低超调要求,在光伏并网控制中存在一定的缺陷[11]。
本文对光伏MPPT控制策略进行展开研究,深入分析了光伏DC/DC电路和并网逆变器的控制结构,以模糊控制理论设计了FLC控制器,并用仿真比较了所设计的控制器与PI控制器的优劣,该研究将为光伏并网控制提供一定的参考价值。
1 MPPT控制原理
一般的光伏发电系统由光伏电池板、DC/DC电路及其控制系统、并网逆变器及其控制系统和直流滤波器、交流滤波器等附加器件组成,具有调度能力的光伏发电系统还应配备一定容量的储能装置。其中并网逆变器用于将光伏输出的直流电转换为工频交流电,实现与大电网的并网运行;DC/DC电路用于将光伏输出低直流电压等级部分与逆变器的高直流电压等级部分连接。
如前文所述,光伏电池输出特性曲线是一条具有唯一最大值的近抛物线,且随着光照强度的变化,该曲线峰值也在发生偏移,如图1所示。
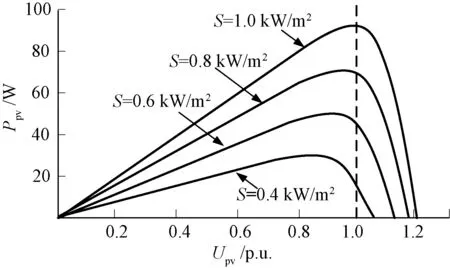
图1 光伏电池板输出特性
由图1可知,在确定光照条件下,光伏输出电流为出口工作电压的函数,即认为Ipv=Ipv(Upv),已知功率计算公式为:
Ppv=Upv·Ipv(Upv)
(1)
式中:Ipv、Upv分别为为光伏电池板的输出电流和输出端直流工作电压;Ppv为光伏实时输出功率。对公式(1)进行求导可得:
(2)
“导纳增量法”即是依据公式(2)中结论,判断Ipv/Upv+ΔIpv/ΔUpv的符号的正负以判断光伏直流工作电压相对最大功率点电压的方向,并使得直流工作电压进一步向最大功率点方向扰动:符号为正,当前工作电压小于最大功率点电压,增加正向扰动;符号为负,当前工作电压大于最大功率点电压,施加反向扰动减小工作电压值。
2 光伏并网控制结构
输出端直流工作电压的调节和扰动主要依靠DC/DC电路的调节,工作机制如图2所示。

图2 DC/DC电路
该升压电路利用“稳态条件下,电感两端的电压在一个开关周期内平均值为0”的原则。电压有如下关系式:
Upvton+(Upv-Ucov)toff=0
(3)
式中:Ucov为逆变器直流侧电压;ton和toff分别为触发开关S周期内开通时间和关断时间。由式(3)可进一步推导出电压关系式:
(4)
式中:D=ton/(toff+ton),为触发开关S的占空比。
通过控制D即可实现对光伏输出端电压的控制,基于此,MPPT控制策略下DC/DC电路的控制系统设计如图3所示[12]。
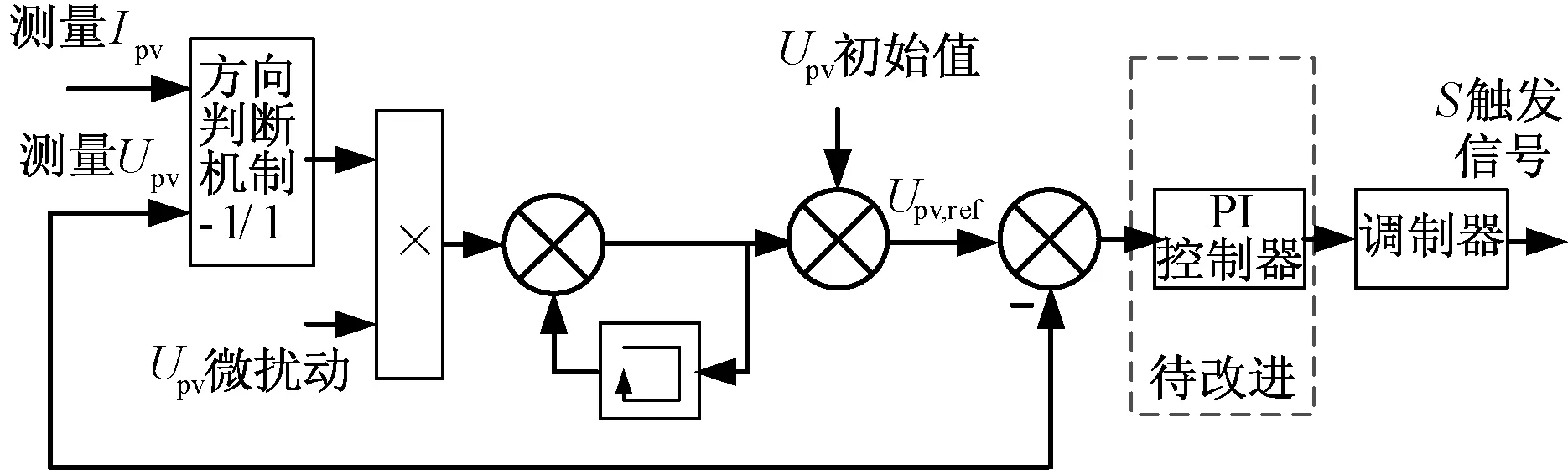
图3 DC/DC电路的控制系统
逆变器作为直流与交流的换流装置,需保证直流端电压的稳定,而当前光伏研究中的逆变站多采用具有开关全控性的电压源换流器(Voltage Source Converter,VSC),其控制结构通常采用电压—电流双环控制结构,外环用于追踪目标直流电压,内环用于保证电流控制的直接性和快速性,结构如图4所示[13]。

图4 逆变器控制系统
当前光伏发电并网的DC/DC电路和并网逆变器的控制主要采用PI控制器,该控制器因结构简单,成本低廉等特点而被广泛应用。但因为PI控制的局部收敛特性,导致其在光照波动和扰动追踪方面响应能力有限。尤其是当光照发生较大跃变时,其控制表现出较大的超调量和较长的调节时间。PI控制器超调过大,易引起光伏并网设备在最大功率点附近的往复振荡和直流电压大幅波动,对光伏并网的稳定运行不利;而较长的调节时间,使得控制器不能快速跟踪最大功率点,造成光伏出力的浪费,不利于新能源尽最大可能出力。
3 基于模糊控制的FLC控制器设计
模糊控制技术(Fuzzy Logic Control,FLC)因为不依赖于被控对象的精确建模工作,且控制参数可依照模糊隶属关系而随时变化,具有抗干扰性强和鲁棒性能优越等特点,因而被广泛应用于风力发电系统[14-15]。现依据模糊控制原理对光伏发电系统中图3和图4所示的控制器进行设计,使得所设计的模糊PI控制器根据所输入的偏差及偏差变化率实时改变控制器的比例参数和积分参数,提高系统动态性能。FLC控制器包括“模糊化”、 “模糊推理”、 “模糊库”、 “去模糊化”等结构,其基本设计步骤为:
(1)确定模糊变量的赋值表,确定论域内元素(误差e,误差变化率de)对模糊语言变量的隶属度;
(2)依照光伏并网系统的实际运行情况和经验值确定模糊控制规则表,进行模糊库建立;
(3)通过相关仿真,验证控制器“去模糊”的响应效果。
以DC/DC电路的PI控制器为例进行FLC控制器设计,假设e元素论域为 [-100,100],de元素论域为[-1000,1000],对应的模糊子集为:误差e、误差变化率de={NB,NM,NS,ZO,PS,PM,PB},其元素分别代表{负大、负中、负小、零、正小、正中、正大}。本文选取高斯函数和三角函数相结合的隶属度函数。当偏差大时用高斯函数,偏差不大时用三角函数。对于非线性、时变及难用精确传递函数描述的光伏并网系统,依据基本经验,假设误差和误差变化率的隶属函数相同,如图5所示。
则所对应的模糊PI控制器中比例参数Kp和积分参数Ki的模糊规则如表1和表2所示。
模糊推理选用Mardani型,整理可得FLC控制器的比例、积分增益分别为:
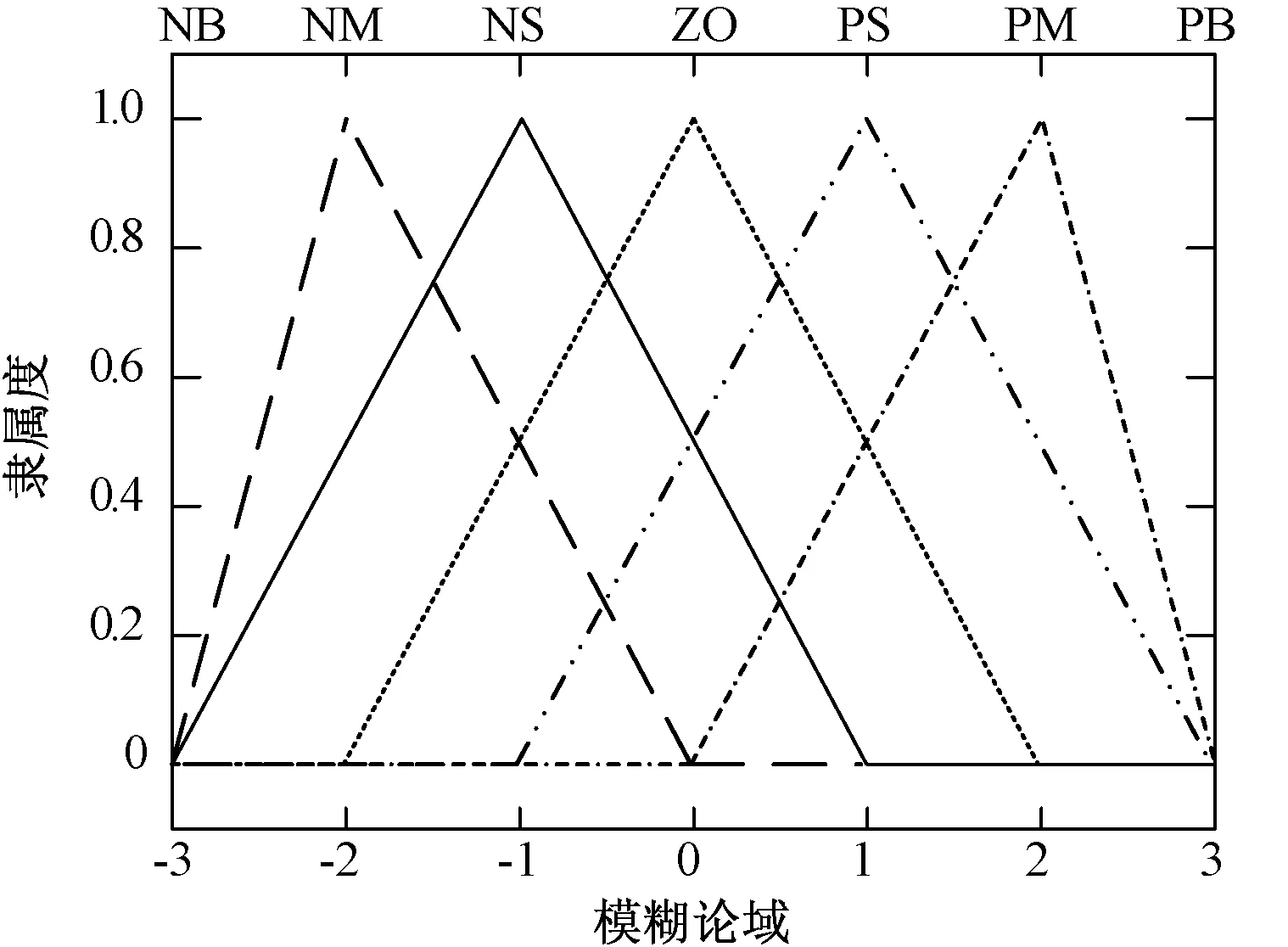
图5 误差隶属函数
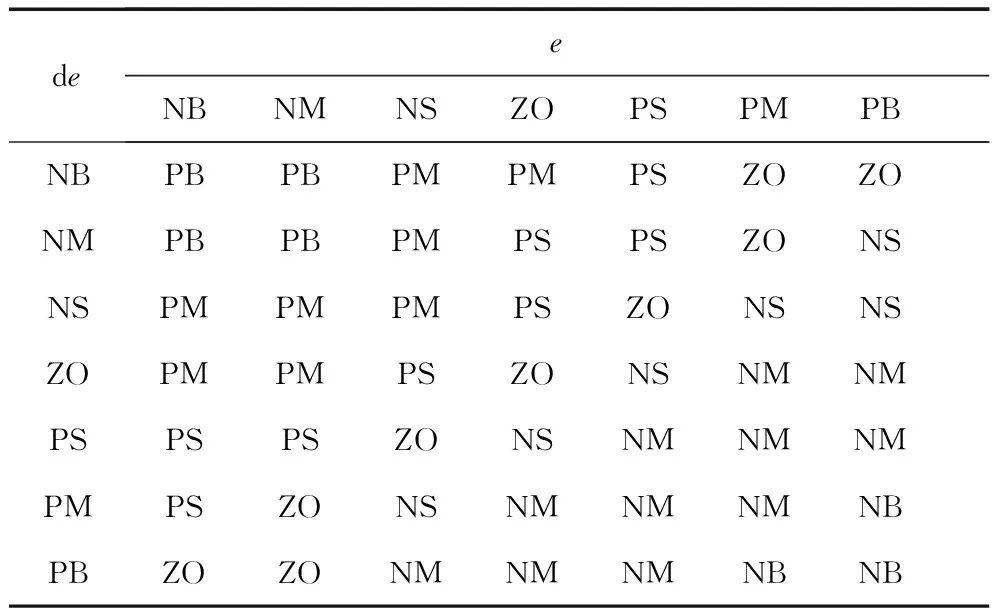
deeNBNMNSZOPSPMPBNBPBPBPMPMPSZOZONMPBPBPMPSPSZONSNSPMPMPMPSZONSNSZOPMPMPSZONSNMNMPSPSPSZONSNMNMNMPMPSZONSNMNMNMNBPBZOZONMNMNMNBNB
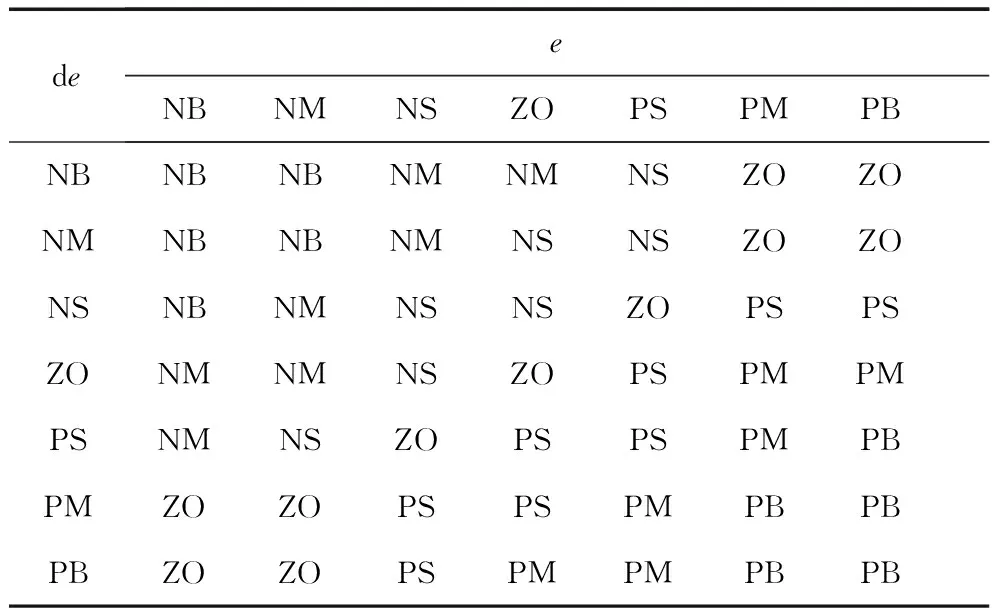
表2 积分参数变化量ΔKi模糊规则表
(5)
式中:Kp0和Ki0分别为比例、积分增益初始值。
由以上设计得到FLC控制器,该控制器因具有灵活的参数调整主动权,对被控对象的建模精度要求不高,因此相较于传统的固定参数PI控制器,拥有更为优越的控制性能。
将FLC控制器应用于DC/DC电路和逆变器控制结构,可实现以下控制目标:当误差偏大时,系统进入暂态过程,控制器可以增大Kp减小Ki,从而使系统的动态响应更加敏感,快速消除误差;当误差较小时,系统需抵抗稳态干扰,控制器可以增大Ki减小Kp,提供系统的稳态性能,防止超调。
4 仿真验证
利用MATLAB/SIMULINK搭建“光伏电池板— DC/DC电路—逆变器—大电网”的光伏并网系统。设计逆变器交流侧电压380 V,直流侧电压550 V,MPPT人为扰动量为0.05 V,逆变器控制采用图4所示双环结构;光伏电池用5×8个受控直流源代替,其控制信号为光照强度和温度的逻辑函数,所设计的单光伏的输出特性如图2所示;现光照强度以一个G(s)+N(s)的信号源代替,以G(s)模拟长时间尺度光照波动(如天气变化),单位为kW/m2:

(6)
N(s)模拟短时间尺度光照波动,设计该函数为自0.3 s处触发,步长为0.02 s,数值为[0.05,-0.03,0.01,0.07,-0.04,-0.02,-0.06,0.05,0,0.02]的数列,单位为kW/m2。
比较光照强度函数波动下,PI控制器控制下和FLC控制器控制下光伏输出功率和逆变器直流端电压的波形,如图6所示。
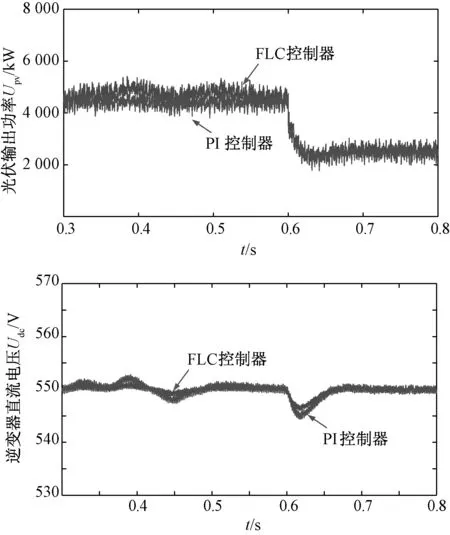
图6 两种控制器下的光伏输出
由图6可知,两种控制器均能实现光伏并网的MPPT控制。但FLC控制器不仅可以实现快速调节,而且相比于传统PI控制器拥有更好的控制表现:
(1)应用FLC控制器的光伏并网结构拥有更高的功率输出值。这是因为相比于传统PI控制器,FLC控制器对光照强度的变化更加敏感,能以更短的时间追踪当前光照条件下的最大功率点,更快地实现当前光照强度下的最大功率输出,因此具有更高的功率输出量。
(2)应用FLC控制器的光伏并网结构拥有更平稳的直流电压波形。首先,在DC/DC电路控制中,FLC控制器超调量衰减更快,减少了最大功率点追踪过程中的电压振荡幅度,使得光伏输出尽快达到新稳态;其次,在逆变器控制中,FLC控制器可以更加有效地维持电压稳定,并抵抗了功率的波动对直流系统稳定性带来的干扰,具有更强的控制能力。
仿真验证了FLC控制器在逆变器电压调节和DC/DC电路最大功率点追踪方面的控制优越性。
5 结论
本文基于对光伏电池板输出特性及光伏并网控制基本结构的深入研究,介绍了光伏并网的MPPT控制策略及该控制策略的实现途径;并根据光伏发电对光照强度的依赖性和因之产生的功率波动性,指出当前PI控制器的缺陷;基于以上分析,本文根据模糊控制原理,设计了FLC控制器,该控制器因具有灵活的参数调整主动权,对被控对象的建模精度要求不高,因此相较于传统的固定参数PI控制器,拥有更为优越的控制性能;将该控制器应用于逆变器电压调节和DC/DC电路在最大功率点追踪,仿真验证了其相对于PI控制器的优越性。特别是在光照强度频繁变化的工况下,光伏双FLC控制可以得到更平稳的电压波形和更高的功率输出,有利于增强光伏的并网稳定性和实现新能源的最大可能出力。该控制器的设计将为光伏并网控制提供更为有利的手段,从更高层次看,该控制器的设计将为新能源发电与并网运行提供更多的技术参考。
参考文献:
[1]王成瑞,赵达薇.中国各省市能源结构的聚类分析[J]. 电力科学与工程,2007,23(2):27-29.
[2]颜苏莉,孙婧豪. 我国光伏产业的发展现状、存在问题及解决之道[J]. 华北电力大学学报(社会科学版),2016,99(1):9-12.
[3]张华彬,杨明玉. 基于天气类型聚类和LS-SVM的光伏出力预测[J]. 电力科学与工程,2014,30(10):42-47.
[4]李琦,辛恩承,徐睿,等. 常规太阳能电池低倍聚光条件下的特性研究与应用[J]. 智能电网,2016,4(7):670-673.
[5]胡静,张建成. 基于数值方法的光伏发电系统MPPT控制算法研究[J]. 电力科学与工程,2009,25(7):1-6.
[6]VEERACHARY M. Fourth-order buck converter for maximum power point tracking applications [J]. IEEE Transactions on Aerospace and Electronic System, 2011, 47(2):896-911.
[7]FEMIA N, PETRONE Q, SPAGNUOLO G, et al. Optimization of perturb and observe maximum power point tracking method[J].IEEE Transations on Power Electron, 2005, 20(4):963-973.
[8]陈力,胡钋,吕国峰,等. 基于改进电导增量法的 MPPT 机制分析与仿真研究[J]. 智能电网,2017,5(2): 172-177.
[9]李岚,佟轶. 光伏发电中光伏电池变步长导纳增量法最大功率追踪[J]. 电气技术,2012(6): 37-40.
[10]陈权,李令冬,王群京,等. 光伏发电并网系统的仿真建模及对配电网电压稳定性影响[J]. 电工技术学报,2013,28(3): 241-247.
[11]刘桂花,石桐,马田源,等. 弱电网下光伏并网逆变器自适应准PRD控制方法[J]. 电网技术,2017,41(1): 112-117.
[12]程军照,吴夕科,李澍森,等. 采用Boost的两级式光伏发电并网逆变系统[J]. 高电压技术,2009,35(8): 2048-2052.
[13]DIVSHALI P H, HOSSEINIAN S H, ABEDI M. A novel multi-stage fuel cost minimization in a VSC-based microgrid considering stability, frequency, and voltage constraints[J]. IEEE Transactions on Power Systems,2013,28(2):931-989.
[14]SIMOES M G, BOSE B K. Fuzzy logic based intelligent control of variable speed cage machine wind generation system[J]. IEEE Transaction on Power Electronics, 2010, 12(1):87-95.
[15]郭鹏.模糊前馈与模糊 PID 结合的风力发电机组变桨距控制[J].中国电机工程学报,2010,30(8):123-127.
猜你喜欢
太阳能(2022年7期)2022-07-30
军事文摘(2021年18期)2021-12-02
新能源科技(2021年8期)2021-04-02
辐射防护(2020年3期)2020-07-15
知识就是力量(2017年12期)2018-01-15
科学与财富(2017年23期)2017-09-24
电测与仪表(2016年24期)2016-04-12
中国光学(2015年5期)2015-12-09
电源技术(2015年2期)2015-08-22
电测与仪表(2015年20期)2015-04-09
