
基于MK60DN512的电磁智能小车的硬件设计
2018-05-17 08:17:24
福建质量管理 2018年11期
(贵州大学电气工程学院 贵州 贵阳 550025)
一、引言
随着单片机技术的不断发展[1],能够自动进行轨迹识别的智能小车得到了广泛应用[2]。本文设计了这样一种智能寻迹小车,该智能车通过对电磁传感器所采集的数据进行处理,再根据车模驱动上两个编码器所采集的数据来调整小车的方位、速度、转向角等,进而控制小车舵机的转幅,使小车在最短的时间内稳定快速运行。本文采用MK60DN512作为系统的唯一核心控制单元,并进行信号采样、处理、传输数据等动作,产生PWM波控制电机的运行。
(一)系统硬件
系统硬件的整体框架如图1-1所示。
(二)核心控制部分
核心控制部分主体是由飞思卡尔公司提供的16位单片机MK60DN512,K60是一款针对汽车电子市场的高性能的32位单片机,具有速度快、功能强、成本低、功耗小等特点。K60作为整个智能车的“大脑”,将采集电感传感器、编码器等传感器的信号,运行控制算法,根据控制算法做出控制决策,驱动直流电机和伺服电机完成对智能车的控制[3]。
(三)传感器部分
通过感知外部世界的环境信息和车模自身的状态信息,使小车完成赛道的检测并获得控制数据,从而使得各部分能够协调工作。传感器模块包括多个电磁传感器以及编码器。
(四)人机接口
实现模式和参数选择、状态指示、实时监控以及数据传输与存储等人机交互功能,包括拨码开关、无线传输模块、LED状态灯等。
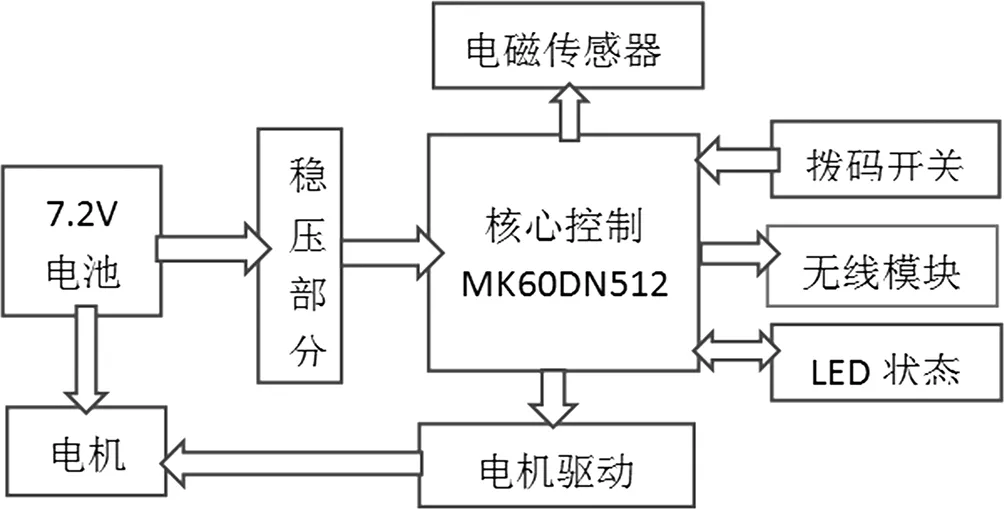
图1 整体框架图
二、各部分外围电路的设计
(一)电源部分
电磁车的电机需要7.2V或者更高的电压,其他部分需要5V的电压,由于该车模的电池提供7.2V-8V的电压,因此只需一片性能稳定的稳压芯片即可。电源分配图如图2所示。

图2 电源分配图
(二)核心控制部分
核心控制部分由单片机MK60DN512最小系统板和核心控制电路板组成。核心控制部分是整个系统的关键。其中的单片机最小系统板MK60DN512主要包括时钟、旁路电容、电源接口、烧录和调试接口、I/O接口。
(三)传感器部分
通过感知外部世界的环境信息和车模自身的状态信息,为小车完成赛道的检测与跟踪以及实现小车的快速行走提供所需要的信息。传感器部分主要由电磁传感器感知赛道信息,电磁车使用500线的欧姆龙光电编码器作为速度传感器,安装在车尾与传动齿轮啮合。
(四)执行机构
执行机构主要包括电机驱动、电机。电机驱动电路制作在核心控制板上,单片机输出PWM信号通过电机驱动控制电机的转速;电机驱动使用H全桥电路,两路H全桥电路驱动两路电机。如下图所示为H全桥电路原理图。
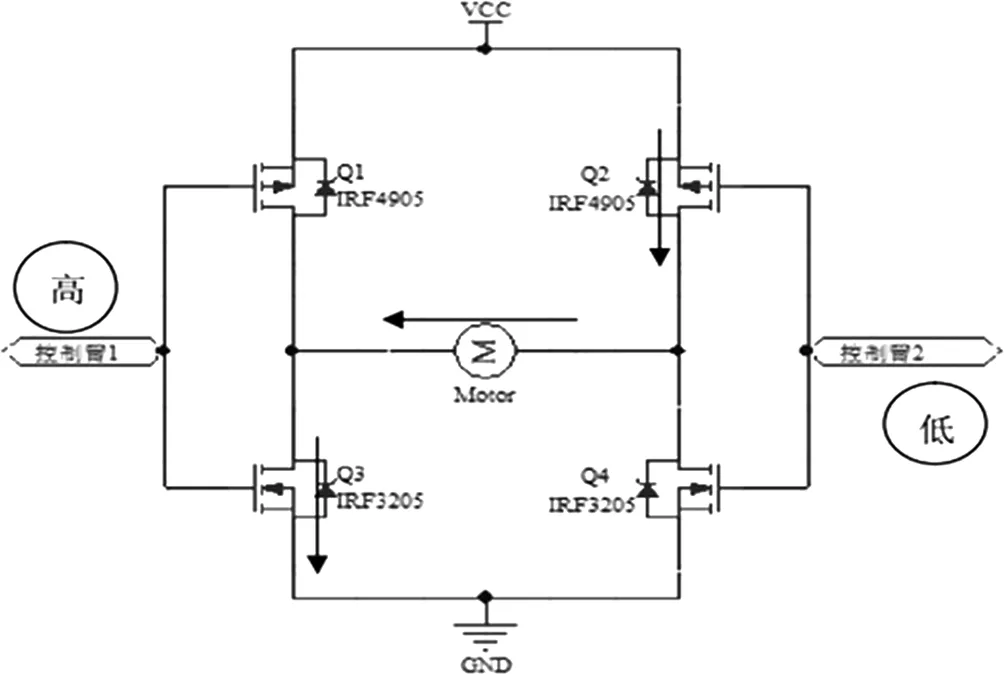
图3 H全桥电路原理图
(五)人机接口
人机接口主要用于单片机与调试者之间的交互,4位拨码开关可以用于调整速度和相关参数,8位LED用于显示当前车速状态,无线模块用于用于实时传输数据[4]。
三、结束语
本文介绍了智能车寻迹小车硬件系统各个模块的设计,实现了电磁车的基本功能。首先,要想进一步提高电磁车的速度,在机械设计部分就必须考虑各硬件间结构的相互整合,在安装过程中尽量降低小车的重心,降低小车的底盘,并对其转向结构作出优化,最大限度的提升小车的速度,其次,需要考虑的是对电磁传感器安装高度的调整,以便电磁传感器在一个合理的高度采集到最佳的电磁信号。
【参考文献】
[1]卓晴,黄开胜,邵贝贝.学做智能车——挑战“飞思卡尔”杯[M].北京:北京航空航天出版社,2007.
[2]谭浩强.C语言程序设计[M].北京:清华大学出版社,2006.
[3]王威.HCSI2微控制器原理及应用[M].北京:北京航空航天大学出版社,2007.
[4]韩彩霞.单片机并行I/O口的扩展方法[J].微型机与应用,2013,32(24):28-30.
猜你喜欢
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
中国生物医学工程学报(2019年4期)2019-07-16 08:04:16
文苑(2018年22期)2018-11-19 02:54:18
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
电子制作(2018年8期)2018-06-26 06:43:02
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:46
电子设计工程(2017年20期)2017-02-10 03:39:29
电子器件(2015年5期)2015-12-29 08:42:24
电测与仪表(2014年13期)2014-04-04 12:04:18
