一种渔业水下机器人的系统设计及模型研究
2018-05-16 09:19林礼群沈熙晟谌志新徐志强沈佳斌
渔业现代化 2018年2期
房 熊, 林礼群, 沈熙晟, 谌志新, 徐志强, 沈佳斌
(1中国水产科学研究院渔业机械仪器研究所,农业部远洋渔船与装备重点实验室,上海 200092;2海洋国家实验室深蓝渔业工程装备技术联合实验室,山东 青岛 266237;3中国水产科学研究院东海水产研究所,上海 200090)
中国现阶段可供开发的渔业资源面临过渡捕捞和渔场环境污染恶化的问题,大力发展用于近海生物资源修复的生态养殖渔业成为迫切需求。蓝色生态养殖首先需要专业的渔业探查及生物采样装备。水下机器人因具有安全、灵活、作业时间长和市场前景广阔等优点而受到各海洋大国的青睐。在欧、美和日本等海洋经济发达国家已经研制出用于养殖行业的水下机器人,并成功应用到了实际生产中,少数公司已推出了水下机器人系列产品以满足不同的需求[1-5]。国内由于起步较晚,在该领域内相关研究较少,更没有系列化的产品[6-7]。
本文围绕海洋渔业生态养殖发展对水下机器人的需求,针对现阶段用于水产养殖水下机器人技术门槛高、产品少、价格高等现状,开展渔业水下机器人系统设计与集成研究,对一些关键技术进行研究开发,产品主要用于海洋养殖环境监测、水生生物资源采集。
1 系统组成及形体特征
1.1 系统组成
根据前期调研结果,设定目标为一个小型有缆水下机器人(简称ROV)。控制台通过摄像机等设备进行水下生物、网箱养殖情况的观察,必要时可采集样本。该机器人具有重量轻、价格低、维修方便等特点[8]。其主要工作方式是通过一个带有导航系统(以超短基线作为位置传感器,并辅以其他姿态传感器、罗盘、深度计等)的ROV使摄像机潜到要求深度,寻找到要求的地点,把水下图像信息传给水面控制台,通过回传的图像信息作为反馈远程操纵ROV,从而寻找水下观察目标并采样。
整个系统分为水上、水下两个部分,通过电缆相连(图1)。水上部分由计算机控制软件系统、水上嵌入式控制系统(控制箱)和电源组成;水下部分由水下控制器、密封舱、推进器、浮力模块、照明灯、摄像机和各类传感器等组成。

图1 系统结构组成图
1.2 形体特征
水下机器人形体的选择一般要考虑4个特点:阻力小,航行性能好,足够的强度,便于总体布置,良好的工艺性。在形体设计中,框架型的结构设计是指所有搭载的设备都固定在一个框架内,这种形体的机器人总体布置方便,便于加挂和换装。但由于没有考虑流体阻力的影响,其在水下运行过程中能量消耗较大,大多是应用于有充足动力供应的有缆式水下机器人。此类水下机器人通常航速较小,因此移动中的流体阻力因素考虑较少,且大多通过岸基或母船供能[9-11]。
考虑到渔业水下机器人的主要作用是观察及监测,其工作环境靠近海岸线,涉水深度较浅。因此在初始对于水下机器人的形体设计中倾向于采用框架结构设计,充分利用其结构简单、布置方便的特点,然后在框架结构中搭载各种模块,从而达到水下机器人的工作要求。
2 推进系统设计
2.1 推进器布置
推进器是渔业水下机器人非常重要的核心部件,其作用是为整个水下机器人提供前进的推动力。根据渔业水下机器人的作业需求、运动性能要求和低成本、民用化的经济型目标,采用如图2所示的布置方案,水平面内双推进器平行布置,垂直面内单推进器布置。这种布局方式有3个自由度,可以产生的推力和力矩为:
∑TX=T1+T2
∑TZ=T3
∑MZ=a(T1+T2)
(1)
式中:TX—X方向上的推力,N;T1—第一推进器的推力,N;T2—第二推进器的推力,N;TZ—Z方向上的推力,N;MZ—扭矩,N·m;T3—垂直推进器的推力;a—推进器推力到水下机器人中心位置的距离,m。
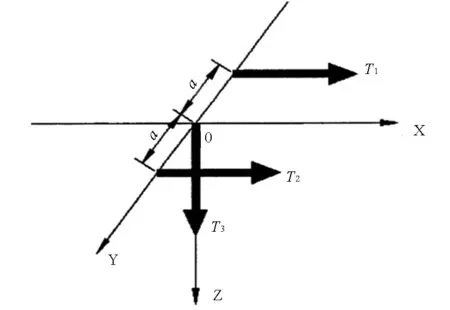
图2 推进器布置方式
2.2 推进器设定
根据ROV本体受到的总阻力可计算推进器功率,再根据布置方式确定推进器选型[12]。其阻力计算公式为:
(2)
式中:Rt—推进器总阻力,N;Ct—本体总阻力系数,其值一般在3.5×103~4.9×103;ρ—流体质量密度,kg/ m3;v—航行速度, m/s,S—机器人本体的湿表面面积,m2;Rf、Rw、Re—分别表示摩擦阻力,兴波阻力,粘压阻力,单位都为N。
总阻力主要与本体的形状、表面粗糙度以及附体的情况有关,包括摩擦阻力Rf、兴波阻力Rw和粘压阻力Re。
当下潜深度大于1/3潜体长度时,可以不计兴波阻力。本设计中,由于水下机器人的下潜深度远远大于机器人本体长度,所以在阻力计算中兴波阻力均不需要考虑。查阅相关资料确定阻力系数。根据水下机器人总体尺寸,其湿表面面积约为1.5 m2,假设航速v=0.4 m/s,为保证顺利驱动,留有一定余量。取余量系数1.2,得总阻力Rt=118 N, 推进器所需最小功率P=47.2 W。
3 水下机器人数学模型
3.1 坐标系建立
为了描述ROV的运动,首先必须建立适合描述运动的坐标系和运动参数。ROV的操纵运动相当于刚体在流体中受重力和水动力作用的一般运动,因此在坐标系和运动参数的选取中,必须考虑到刚体力学和流体力学的特点。根据国际水池协会推荐的造船与轮机工程学会术语公报的体系,建立两种坐标系:固定坐标系和运动坐标系。如图3所示,ROV的运动可由运动坐标系表示成沿三根轴的移动和绕各轴的转动,即6个自由度的运动。
运动坐标系原点相对于固定坐标系的速度U在运动坐标系上的3个投影分量称为纵向速度u、横向速度v和垂向速度w;机器人绕原点的角速度口在运动坐标系上的3个投影分量称为横摇角速度p、纵摇角速度q和摇舷角速度r;作用在机器人上的外力在运动坐标系上的3个分量称为纵向力X、横向力Y和垂向力Z;作用力对于原点的力矩在运动坐标系上的3个分量称为横摇力矩K、纵倾力矩M和摇舶力矩N。运动坐标分量参数和运动分量见表1。
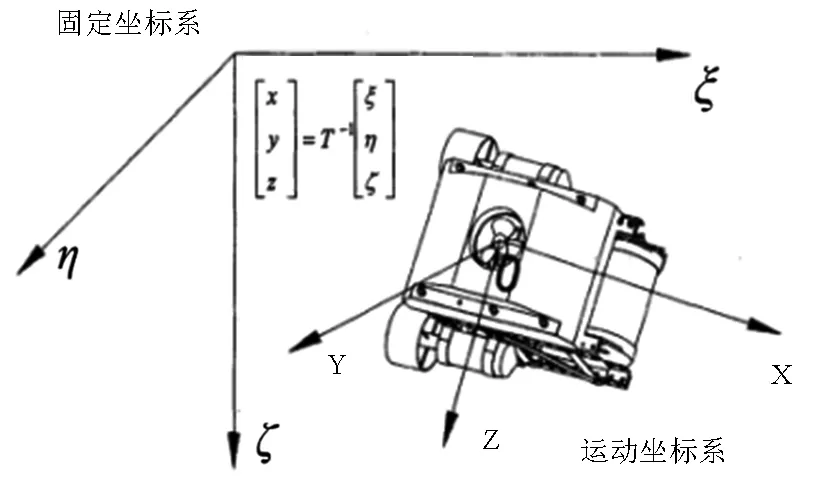
图3 固定坐标系和运动坐标系示意图
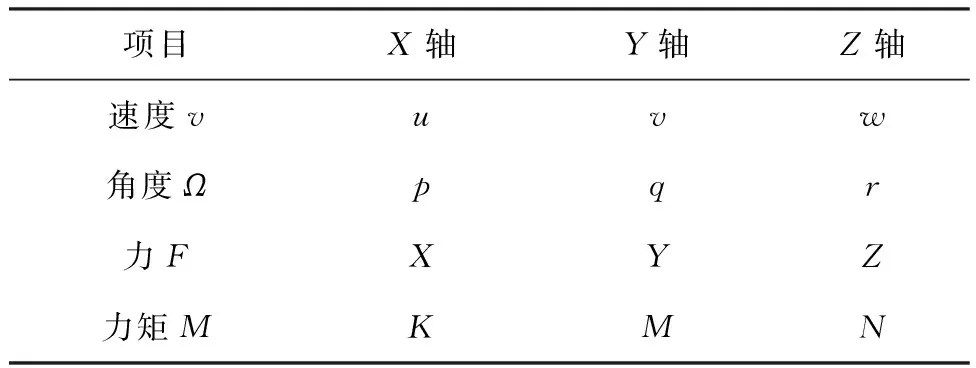
项目X轴Y轴Z轴速度vuvw角度Ωpqr力FXYZ力矩MKMN
3.2 ROV运动方程
根据刚体动力学理论可知,ROV的空间6个自由度运动方程见式(3)。当运动坐标系的原点0与机器人重心重合时,平动方程和旋转方程可以简化成式(4)。
(3)
(4)
解方程关键要素为运动分析简化及受力分析,包括静力、推进力、水动力计算。ROV在水中运动时受到多个力或力矩的作用,主要可分为:
(1)水动力,即流体动力。在ROV上安装的推进器推动周围的水运动的时候,水会产生一个对ROV 本体的反作用力。假定流畅特性是不变的,则水动力为运动状态和操纵特性的函数[14-15]。水下机器人在空间运动中的水动力和力矩用广义水动力G表述为:
G=(X′Y′Z′K′M′N′)T
(5)
(2)推力。推进器产生的推力是推动ROV运动的主要动力,同时也是ROV运动控制的控制量[16-18]。计算时把每个推进器的推力分别投影到3个坐标轴上,然后每个方向上的总推力等于各个投影推力的总和。且根据水平推进器到坐标轴的垂直距离,可以计算出推力的合力在3个坐标上的力矩大小。
(3)静力。ROV所受的静力包括重力和浮力。
(4)干扰力。由风、浪、流以及其他潜水器运动产生的干扰力也是一种流体动力,会干扰ROV的正常运动[19-21],为简化计算,不考虑风、浪、流引起干扰力。
4 三维模型建立
根据水下机器人的螺旋桨电机集成模块、电子舱内的电路板摄像头及照明集成模块的选型及尺寸要求,通过运用三维设计软件Pro-E建立3种水下机器人潜器模型。
4.1 模型I
模型I:主要由3个管式螺旋推进器、电子舱、电池舱、把手等组成(图4)。
电池舱除了提供系统电源外,还有改变系统配重以调整潜器平衡的作用,形式简单,但集成要求及工艺较高。
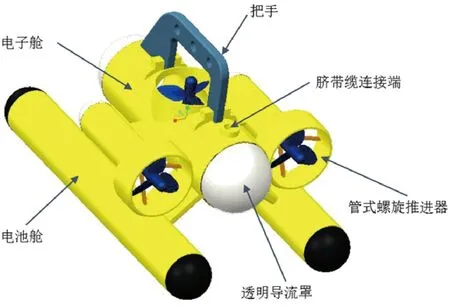
图4 模型I
4.2 模型II
模型II:既具有推进功能又兼具行走功能(图5)。底部安装的两个螺旋推进器可以快速推进潜器运动,当需要缓慢移动时可以利用底部的履带进行行走,这样在复杂的水下环境中该型的潜器也能顺利运动。与此同时,该型潜器采用纯框架式结构,内含电池舱,通过浮力模块调整重心,其最大特点是便于搭载传感器和作业设备,通过模块化的设计可以搭载多种高清摄像头,方便使用者多角度观察水下情况,并且采用通用化的接口设计,使用者在需要时可以换装机械手臂,从而在水下可以进行机械运动,大大提高了潜器的实用性。基本能够满足渔业水下机器人的使用要求,因此,在设计中选择该型水下机器人作为样机生产的原型。通过使用新型复合高分子材料既保证了模型的整体强度要求又大大减轻了潜器的整体重量。
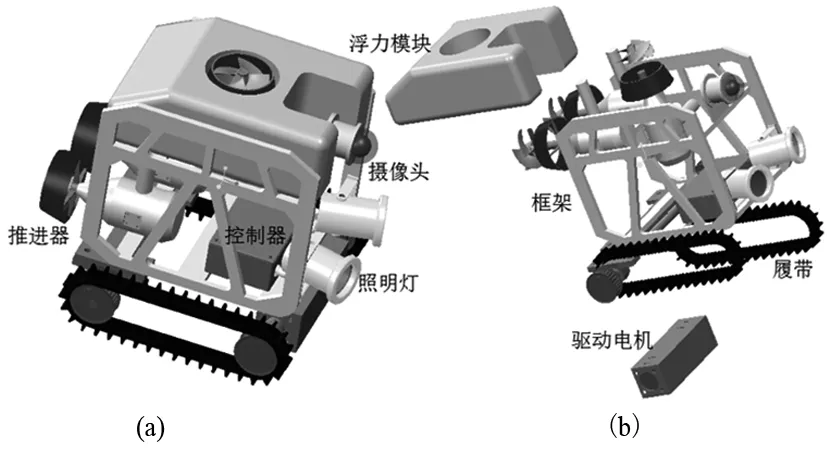
图5 模型II
4.3 模型III
模型III为流线型水下机器人(图6)。除了包含水下可视系统和各类环境监测传感器外,其主要特点是腔体两侧翼内设置高度集成的垂向推进器,腔体内两侧设置有前进方向推进器。腔体内推进器在推进过程中,由于在腔体内外产生压强差,进而产生吸力。因此这种水下机器人兼具渔业养殖环境监测及吸取网箱死鱼的作用,预期在网箱养殖领域应用前景可观[22-23]。但在实际生产加工中会遇到许多困难。
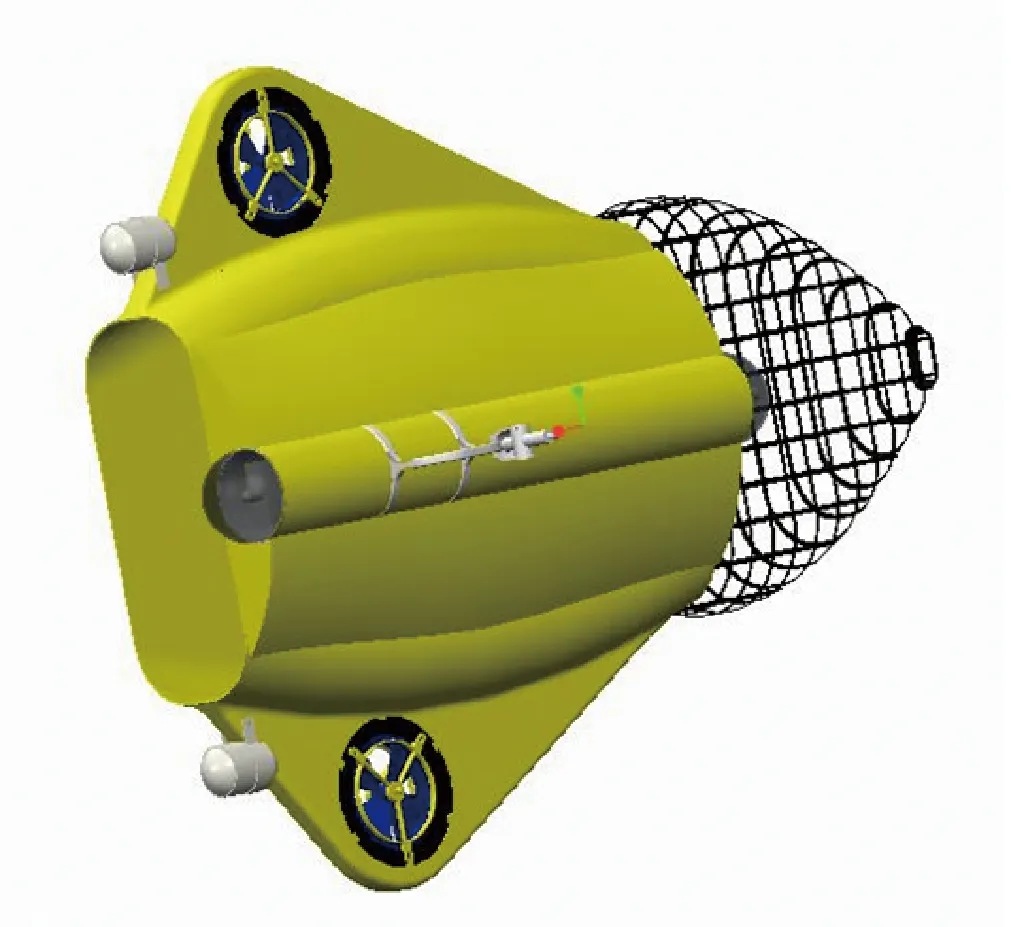
图6 模型III
5 渔业水下机器人样机试制
根据以上分析和论证,通过对几种水下机器人外部结构的分析并结合实际情况,设计及优化了渔业水下机器人,并且试制了样机(图7)。

图7 渔业水下机器人样机
该机器人采用框架结构,尾部采用双螺桨推进器作为动力装置,前段集成了温度传感器、压力传感器、2组高清摄像头(图8)、LED灯等设备。中间部分LAN板上集成了通讯系统模块,在CPU主板上集成了主控CPU、LDE驱动、电压传感器、电子罗盘等。在电源板上安装了各个模块的电源集成板。在驱动电源板上安装了主电源、电池充放电模块等。考虑到实际需要,可以换装水下操作手臂,该手臂可以完成夹取、伸缩、旋转等动作(图9)。

图8 渔业水下机器人摄像头

图9 渔业水下机器人手臂
渔业水下机器人完成样机试制后,进行了水下耐压测试,以检测机器人各个零件是否满足水下工作条件,并进行运行检测。试验表明,水下机器人能较好满足水下工作要求,水下运行时没有出现腐蚀、失效等问题,通过高清摄像头可以方便、清晰地观察到水下环境。通过各个传感器的反馈可以掌握水下环境数据资料。
6 结论
通过运用三维设计软件Pro-E建立了3种渔业水下机器人模型,并完成了样机试制。试验结果表明,该机器人满足压力测试及水池模拟要求,通过摄像头及机械手臂模块的嵌入,可以方便地观察和处理水下事务。通过对渔业水下机器人的推进系统和ROV模型的研究,给出了相关力学方程和力学参数,建立了多种机器人实体模型,为渔业水下机器人的设计与制造提供参考。
□
参考文献
[1] 李弘哲.水下机器人发展趋势[J].电子技术与软件工程,2017(6):93-96.
[2] 钟正新.用于水产养殖的行走式水下电视摄像装置[J].渔业现代化,1990(6):4-7.
[3] 陈石娟.水下机器人[J].海洋与渔业,2013(7):48-53.
[4] 关长涛,崔国平,李娇,等.多视角深水网箱水下监视器的研制[J].渔业现代化,2008,35(1):10-15.
[5] 江凯贤,韩超.机器人ROV在海洋工程水下的施工技术研究[J].工程技术,2016(5):235-240.
[6] 刘珍娜,秦婧文.浅谈仿生水下机器人的发展现状[J].山东工业技术,2018(1):201-206.
[7] 李弘哲.水下机器人发展趋势[J]. 电子技术与软件工程,2017(6):93-95.
[8] 魏延辉,田海宝,杜振振.微小型自主式水下机器人系统设计及试验[J].哈尔滨工程大学学报,2014(5):566-570.
[9] 蒋磊,郝静如.超小型水下机器人本体的研究[J].机械设计与制造,2009(12):176-179.
[10]王秋琰.水下机器人控制系统及设计分析[J].中国战略新兴产业,2017(20):110.
[11]杨建华,田守业.水下机器人运动控制系统设计与实现[J].电子产品世界,2017,24(1):33-36.
[12]季册,张凯临.一种基于微小型水下机器人推进器的控制系统设计[J].中国水运,2012,12(7):82-84.
[13]杨建华,田守业等.水下机器人运动控制系统设计与实现[J].电子产品世界,2017(1):33-36.
[14]王志东,窦京,凌宏杰,等.一种开架式水下机器人流体动力特性研究[J].机械工程与自动化,2015(3):7-9.
[15]陈宇茹,陈敏. CFD在水下机器人压力场分析中的应用[J].中国机械,2016(1):45-46.
[16]胡坤,徐亦凡,王树宗.基于水动力系数敏感性指数的水下航行器运动方程简化研究[J].武汉理工大学学报(交通科学与工程版),2008,32(2):358-361.
[17]胡健,李聪慧,张维鹏,等.基于CFD 的桨舵水动力干扰研究[J].应用科技,2017,44(3):5-11.
[18]李龙,张宏伟,王延辉.无人自治水下航行器外形及推进系统优化设计[J].机械设计,2017(5):23-29.
[19]徐德明.有限元素法建立水泵流体动力学问题计算格式[J].渔业现代化,1993(2):2-9.
[20]阮晓亮.多约束状态下UUV推进轴系模态分析[J].水雷战与舰船防护,2014(2):51-55.
[21]汪小翔,许靖峰,李徐,等.艇模水下阻力试验方法研究与数值验证[J].舰船科学技术,2016(4):42-46.
[22]黄晨冉,程细得,刘祖源等.基于RANS的水下潜器空间运动操纵水动力分析[J].武汉理工大学学报(交通科学与工程版),2017,41(5):833-838.
[23]陈健,吴家鸣,徐灜,等.立式翼型主体拖曳式水下潜器的设计及操纵性能[J].海洋技术学报,2015(4):1-6.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
当代水产(2022年7期)2022-09-20
今日农业(2022年14期)2022-09-15
导航定位学报(2022年2期)2022-04-11
舰船科学技术(2021年12期)2021-03-29
当代贵州(2020年26期)2020-08-21
世界农药(2019年4期)2019-12-30
当代陕西(2018年12期)2018-08-04
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21