虾夷扇贝苗计数装置的设计与应用
2018-05-16 09:19李明智张俊新赵学伟侯景元崔凯歌石旭东张雨薇
渔业现代化 2018年2期
李明智, 张俊新, 赵学伟, 侯景元, 崔凯歌, 石旭东, 陈 浩, 张雨薇
(1 大连海洋大学航海与船舶工程学院,辽宁 大连 116023;2獐子岛集团股份有限公司,辽宁 大连 116001)
随着扇贝底播增养殖模式的迅猛发展[1],为确保底播贝苗的存活率,养殖企业对底播海域的养殖容量更加关注[2-5],对单位海区的底播量提出了更高要求,而底播前贝苗的计数与统计是实现精准底播的重要前提。因此,研发高效合理的贝苗计数与统计装置对支撑扇贝产业的可持续发展具有重要意义。目前,养殖企业为了更加准确地掌握底播贝苗量,对底播前贝苗量进行抽标、计数与统计,然而贝苗计数与统计仍以人工计数为主,且往往在港口或海上进行作业。由于人工作业时间长,贝苗受到干露的影响,干露对其存活率产生较大影响[6-8]。计数准确高效、性能稳定可靠的贝苗计数装置已成为科研院所与养殖企业研发的重点。
目前,国内外研究重点集中在计算机视觉技术的开发。如杨晓光[9]设计了贝苗精选分级系统,但该设备对环境要求较高,不适用于高强度海上贝苗统计作业;马先英等[10]设计了自动分级与计数系统,通过海参在传送带上投影面积大小实现等级分选与计数,但该系统处理效率较低,不适用于海上贝苗统计作业;郭常有等[11]将图像处理技术用于扇贝自动分类,能够有效地完成扇贝的定位和尺寸识别,但同样存在处理效率低的问题,实际应用受限。文献[12]研发的牡蛎幼体计数装置,通过记录流体中牡蛎幼体在探测器上产生的阴影来进行计数与统计。李明智等[13]研发的扇贝苗分级计数装置,可实现高效分级与计数,计数误差约为4.5%。本文针对文献[13]的扇贝苗分级计数装置中计数与统计装置进行升级改造,其目的是进一步提高计数准确率和计数装置的自动化水平。
1 贝苗计数系统整体设计
贝苗计数系统由处理平台、传送排队装置、计数装置和系统控制模块4部分组成(图1)。其中,处理平台包括贝苗存放平台和除杂平台,均采用聚氯乙烯(PVC)材质的孔板(孔径分别为5 mm和10 mm,45°错排),实现贝苗计数前的存放与杂质(杂贝、碎贝壳等)去除,消除杂质对计数与统计准确性的影响。传送排队装置主要由同步齿轮传送带、OPG 61K200RGN-CF 型交流电机(配有OPG6GN10K 型齿轮减速器)和波浪式贝苗排队挡板等组成,可实现贝苗在传送过程中的自动排队。计数装置采用DQL32-2.5光幕计数传感器,信号输出方式为RS485,光轴间距2.5 mm,可有效检测尺寸为25~45 mm的贝苗,同时避开尺寸小于2.5 mm杂质对计数的干扰。系统控制模块包括光幕计数传感器输出485信号的接收和处理,数据采集显示及打印等。系统具体控制流程如图2所示。

图1 虾夷扇贝苗计数装置样机

图2 程序流程图
贝苗计数装置的工作流程如图3所示。计数与统计时将贝苗倒在处理平台上,杂质和海水可通过平台上排杂口和除水海绵进行处理,之后由可调节进料口(70 mm×30 mm)落入传送带上,传送过程依靠波浪式排队挡板组对贝苗进行排队,使贝苗逐个落入计数传感器,并通过系统控制模块实现贝苗的计数、统计与数据打印。
2 关键部件与控制系统设计
2.1 传送排队装置
贝苗计数与统计的关键在于保证贝苗逐一进入计数传感器,其关键是实现贝苗差速传送和消除堆叠现象(由于海水具有一定黏度,且贝苗较小,极易发生粘黏)[13]。因此,排队挡板的布置角度和结构形式成为贝苗差速运动和防止堆叠的关键。图4为贝苗在传送带上的运动形式,上挡板与传送方向夹角为θ1,下挡板与传送方向夹角为θ2。
2.1.1 贝苗在传送带上的运动分析
贝苗经过过渡滑板1时,受传送带上的摩擦力F分力Nd1的作用,处于滑动状态,可表示为:
Nd1=F×sinθ1
(1)
式中:Nd1—贝苗经过过渡滑板1后沿传送路径所受的滑动力,N;F—贝苗在传送带上受到的传送力,N。
同理,贝苗经过过渡滑板2时,贝苗滑动状态可表示为:
Nd2=F×cosθ2
(2)
式中:Nd2—贝苗经过过渡滑板2后沿传送路径所受的滑动力,N。
贝苗经过波浪挡板1时,贝苗在波浪挡板阻力作用下产生转动效果,同时削弱Nd1的滑动力,因此,该过程处于降速转动状态,可表示为:
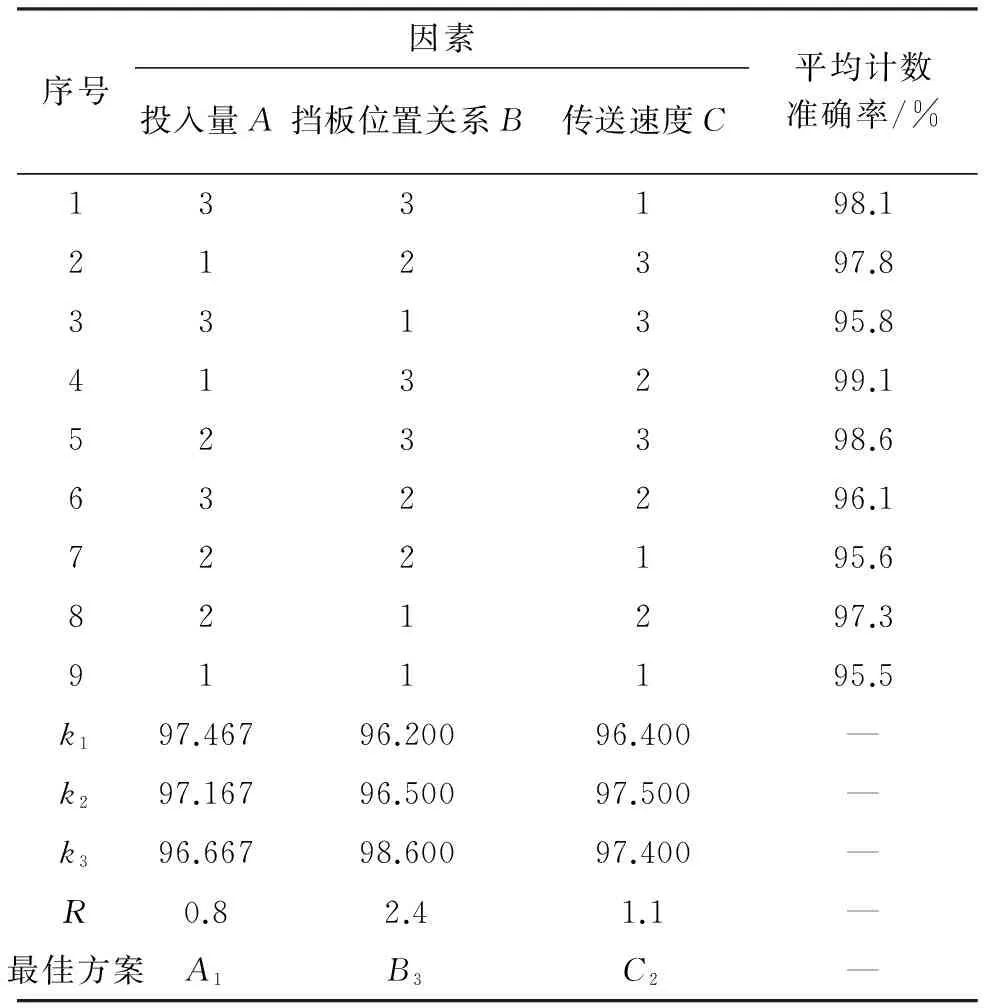
N1=Nd1-Nb1 (3) M1=Nb1×h (4) 式中:Nb1—贝苗经过波浪挡板1时所受的阻力,N;N1—贝苗经过波浪挡板1时的滑动力,N;h—贝苗经过波浪挡板时所受阻力与滑动力间的垂直距离,mm;M1—贝苗经过波浪挡板时所受阻力与滑动力共同形成的扭矩,N·mm。 同理,贝苗经过波浪挡板2时,贝苗转动状态可表示为: N2=Nd2-Nb2 (5) M2=Nb2×h (6) 式中:Nb2—贝苗经过波浪挡板2时所受的阻力,N;N2—贝苗经过波浪挡板2时的滑动力,N;M2—贝苗经过波浪挡板时所受阻力与滑动力共同形成的扭矩,N·mm。 图3 计数装置工作流程图 图4 虾夷扇贝苗在传送带上的运动分析 贝苗经过过渡滑板3、波浪挡板3时,和过渡滑板1、波浪挡板1的运动状态一致。贝苗经过传送波浪挡板组后,进入即排队出口区域,此时贝苗受到传送带摩擦力F的直接作用。由此可得出,在排队挡板的布置角度适合时,贝苗在经过排队挡板时处于降速和旋转状态,离开挡板后处于加速状态,不仅实现了差速运动,而且实现了贝苗的旋转运动。因此,过渡滑板和波浪挡板的组合结构形式能够实现贝苗的差速传输与排队。 2.1.2 排队挡板的布置角度对排队效果的影响分析 在不考虑排队挡板本身的降速与转动效果时,仅考虑排队挡板的布置角度对排队效果的影响。排队挡板的布置角度对贝苗运动状态的影响见表1。为了实现将相邻贝苗的距离拉开,并逐一进入计数器,达到贝苗计数的目的,选取方案B。 表1 排队挡板的布置角度对虾夷扇贝苗运动状态的影响 贝苗计数控制系统的主控制模块选用低功耗、高性能的CMOS8位微控制器STC89C52作为核心,其理论工作温度范围为-40 ℃~85 ℃(工业级),完全满足秋冬季的贝苗计数与统计需求,其作为主控模块不仅能够实现精准计录贝苗个数、显示与打印功能,也能满足低成本、低功耗的要求。图5为系统整体电路设计图。系统工作原理为:系统信号来自于贝苗分选排队后掉落出口处固定的光幕传感器,当贝苗检测通道时,传感器对外输出的485信号发生变化,经中断处理系统处理后,计数器进行统计并送入内存单元存储,产生相应的计数信号,最后单片机通过软件编译将处理后的数据进行实时显示。当计数工作完成后,即可打印出贝苗数量、收苗时间等信息的数据小票,同时数据清零。 图5 系统的整体电路设计图 为了论证贝苗计数装置的准确性与可靠性,在大连市旅顺董坨子港进行了生产性对比试验。试验材料:3 cm及以上虾夷扇贝苗,试验用贝苗具体数量与实际抽标量一致,贝苗计数装置1台。试验方法:试验分两个阶段进行,一是确定计数装置最佳结构参数,二是完成海上生产性对比试验,论证装置的准确性和可行性。 第1阶段:通过对装置工作原理分析得出,影响装置计数准确性的参数为贝苗单位时间投入量、排队挡板位置关系和传送带速度。根据进料口的可调尺寸(70 mm×30 mm),确定单位时间投贝量的范围为140~160个/min;根据贝苗在传送带上的运动分析(图4),确定排队挡板的位置关系为θ1>θ2;根据电机功率,确定传送速度范围为0.4 ~ 0.6 m/s。取3 cm及以上贝苗200个,根据计数装置的最佳参数范围,建立3因素3水平的正交实验[14](表2)。 表2 计数正交实验的因素及水平 第2阶段:利用本计数装置以及人工方式抽标贝苗进行计数与统计,然后对试验结果进行对比分析。试验周期为3 d(2017 年11 月14 日至16日),共完成15组对比试验,每组对比试验重复3 次。为了提高效率,人工计数与统计由4人完成。机械计数与统计是对人工统计的贝苗进行再统计,只需1人完成。操作完毕后确定计数装置的准确率、作业效率。计数准确率η1、作业效率η2计算公式分别为: η1=(1-|Q1-Q2|/Q1)×100% (7) η2=Q1/(t·Q3)×100% (8) 式中:η1—计数准确率,%;η2—作业效率,%;Q1—人工计数与统计贝苗数量,个;Q2—机械计数与统计贝苗数量,个;t—计数与统计时间,min;Q3—作业人数,人。 表2可知,建立3因素3水平,分别可选用L9(33)[15]的正交表。采用SPSS20软件对正交实验进行极差分析,结果见表3。 从表3 的数据可得出,极差最大的是因素B,之后分别为C、A。因素B对计数准确率的影响最大,取第3水平最好,因素C、A分别取第2、1 水平最好。因此,该试验的最优方案为A1B3C2,即计数与统计单位时间投入量为140个/min,排队挡板位置关系为θ1=45°、θ2=30°,传动转速为0.5 m/min。各因素对贝苗计数准确性的影响依次为排队挡板位置关系>传送带电机转速>计数投入量。 表3 计数正交实验L9(33)结果 注:k1、k2、k3为各因素在相应水平下的平均分选纯度;R为各因素的极差 为验证最佳工艺参数组合的合理性,对计数装置最佳工艺参数组合A1B3C2作3 次验证性试验,结果是3次试验的计数准确率分别为99.5%、99.5%和100%,平均值为99.67%。计数准确率均高于目前已使用的计数装置工艺参数组合的最高准确率,说明正交试验选出的工艺参数合理。 生产性对比试验的计数、统计准确率和作业效率结果如表4所示。由表4可知,通过15组生产性对比试验,机械计数的平均准确率为99.6%,误差率低于0.5%,且统计结果无显著性差异(P>0.05)。由此说明,贝苗计数装置具有较高的准确性和稳定性。杨雨辰等[16]研究表明影响生物统计准确性的关键是测量物位置重叠、首尾相连;杨勤成[17]通过控制输送机的振动频率调节贝类间的间距,实现了贝类传输过程排列整齐,依次输出,但过度的振动会对贝苗产生不利影响[18-21];赵庆龙等[22]针对对虾的体型特征及对虾在不同姿态时重心位置的变化,设计了对虾定向排序装置,有效解决了对虾去头、开背等机械自动化剥壳作业难的问题。本研究结合扇贝苗外壳的形状特征,设计波浪排队挡板机构,实现了贝苗的差速与旋转运动,有效解决了贝苗的位置重叠、首尾相连的难题,其计数误差率较文献[13](计数误差率约为4.5%)大幅降低,且由于波浪排队挡板机构采用聚氯乙烯(PVC)材质,实现了无损伤排队传输。 表4 人工与机械计数生产性试验效果对比 由表4还可知,采用机械计数的平均作业效率为2.49 kg/(人·min),约为人工计数作业效率的1.73倍,效率较高,且能够降低作业人数与劳动强度。贝类离水后能维持生命活动的时间称为干露时间[23]。扇贝的存活率随干露时间的增加而降低[24]。因此,采用贝苗计数装置进行统计还可有效减少贝苗的干露时间,有利于提高底播贝苗的存活率。 设计了一种基于STC89C52单片机,并结合光幕计数传感器的贝苗计数装置,能够实现贝苗的自动排队、数据计数采集、显示及打印等功能。通过对计数装置工艺参数的优化与论证,得出计数贝苗单位时间投入量140个/min,排队挡板位置关系θ1=45°、θ2=30°,传动转速0.5 m/min为最佳;各因素对贝苗计数准确性的影响依次为排队挡板位置关系>传送带电机转速>计数投入量。试验结果表明,机械计数的平均准确率为99.6%,误差率低于0.5%,且15组统计结果无显著性差异(P>0.05);同时,机械计数的平均作业效率为2.49 kg/(人·min),约为人工计数与统计作业效率的1.73倍。由此证明贝苗计数装置具有较高的准确性、稳定性和高效型,具有推广应用价值。 □ 参考文献 [1] 李永民,王向阳,刘义海.虾夷扇贝底播增殖技术[J].水产科学,2000,19(2):35. [2] 张继红,方建光,王诗欢.大连獐子岛海域虾夷扇贝养殖容量[J].水产学报,2008(2):236-241. [3] 张继红.滤食性贝类养殖活动对海域生态系统的影响及生态容量评估[D].青岛:中国科学院研究生院(海洋研究所),2008. [4] 张明亮.胶州湾贝类养殖容量研究与分析[D].青岛:国家海洋局第一海洋研究所,2008. [5] 王六顺,张福崇,孙桂青,等.影响河北昌黎海湾扇贝养殖可持续发展的关键问题及对策研究[C]//中国动物学会、中国海洋湖沼学会贝类学分会第八次会员代表大会暨第十三次全国贝类学术讨论会论文摘要集,2007. [6] 于瑞海,王昭萍,孔令锋,等.不同发育期的太平洋牡蛎在不同干露状态下的成活率研究[J].中国海洋大学学报(自然科学版),2006,36(4):617-620. [7] 于瑞海,辛荣,赵强,等.海湾扇贝不同发育阶段耐干露的研究[J].海洋科学,2007,31(6):6-9. [8] 王霞,李刘冬,陈培基,等.离水贝类存活期及其生化变化[J].现代农业科技,2008(23):255-257. [9] 杨晓光.基于机器视觉的扇贝精选分级系统研究[D].大连:大连海事大学,2013. [10]马先英,李明,熊文超,等.基于图像识别技术的海参分级与计数设备的设计[J].大连水产学院学报,2009,24(6):549-552. [11]郭常友,曹广斌,韩世成,等.基于图像处理技术的扇贝尺寸及位置自动识别[J].大连海洋大学学报,2012,27(6):578-582. [12]BØRSHEIM K Y,NORLAND S. A counting device for oyster larvae[J].Aquaculture,1989,78(3):379-382. [13]李明智,张光发,于功志,等.扇贝苗分级计数装置的设计与试验[J].农业工程学报,2015,31(21):93-101. [14]邓振伟,于萍,陈玲.SPSS 软件在正交试验设计、结果分析中的应用[J].电脑学习,2009(5):16-17. [15]盖钧镒.试验统计方法[M].北京:中国农业出版社,2000:382. [16]杨雨辰,杨镇尚,姜娉婷,等.一种渔业生物精确检测计数与分级装置的设计与分析[J].科技与创新,2016(21):68-69. [17]杨勤成.双壳贝类分选装置的研制[D].厦门:集美大学,2012. [18]林艾光,孙宝元,矢田贞美.基于机器视觉的虾夷扇贝分级检测方法研究[J].水产学报,2006,30(3):397-403. [19]沈建,郑晓伟,林蔚,等.文蛤分级试验研究与分级设备设计[J].渔业现代化,2007,34(6):39-42. [20]尹欣玲,姜海勇,刘江涛,等.扇贝分级机的设计[J].农机化研究,2015(3):116-122. [21]徐皓,张建华.我国水产养殖工程学科发展报告[J].渔业现代化,2009,36(3):1-6. [22]赵庆龙,张秀花,王泽河,等.基于对虾体型特征的定向排序装置设计[J].江苏农业科学,2015,43(8):394-396. [23]蔡英亚.贝类学概念第二版[M].上海:上海科学技术出版社,1995:203-245. [24]王霞,李刘冬,陈培基,等.离水贝类存活期及其生化变化[J].现代农业科技,2008(23):255-257.


2.2 系统控制模块设计

3 材料与方法

4 结果与分析
4.1 最佳结构参数组合确定
4.2 验证试验
4.3 生产性对比试验

5 结论
猜你喜欢
中学生天地(A版)(2021年9期)2021-10-25中学生数理化·高一版(2021年1期)2021-03-19
——“模型类”相关试题选登教学考试(高考物理)(2020年4期)2020-11-16家教世界·创新阅读(2019年11期)2019-12-10家教世界(2019年31期)2019-12-05人生与伴侣·共同关注(2018年8期)2018-02-16中学教学参考·理科版(2016年11期)2017-06-08发明与创新·大科技(2017年1期)2017-01-14初中生世界·七年级(2014年2期)2014-03-24