基于电场感应的水下无线电力传输
2018-05-14 14:28李争高世豪张岩李彦辰谭聪
河北科技大学学报 2018年6期
关键词:电力电子技术
李争 高世豪 张岩 李彦辰 谭聪

摘 要:为了验证水下电能传输的可行性和研究影响传输效率的因素,采用电场耦合原理进行了简单的无线充电电路设计,对电场耦合式无线电能传输的系统结构和基本工作原理进行介绍,分析了其相比于磁场耦合方式的特点,以及由此带来的相应优势,通过多物理场仿真模拟极板间电场分布,设计了一种LC双边的CPT系统,采用单片机组成脉宽调制控制电路并用功率放大电路模块组成发射端和接收端。结果表明了运用电场耦合原理进行无线充电的可行性,在研究中发现极板间的传输距离是影响水下无线充电效率的一个因素,而且两个电极之间的杂散电容也会影响极板间的功率,所以由于极板间隙的存在极板间的功率损耗较大。所提出的LC双边CPT系统,不仅实现了水下无线电能传输, 还保证了在一定距离和频率下传输效率的稳定。
关键词:电力电子技术;电场耦合;无线电能传输;水下;极板间距;功率损耗
中图分类号:TM935 文献标志码:A
文章编号:1008-1542(2018)06-0552-07
水下无线电能传输(wireless power transfer, WPT)技术是借助水介质实现将电能由能量发射端通过无直接电气连接的形式传递至能量拾取端的全新电能传输技术,消除了传统接触式供电方式所带来的如导线裸露、插头磨损、接触电火花等[1-4]的固有缺陷,此方式提高了水下电能传输的安全性[1],可用于海底基站对水下航行器(AUV) 的供电[2-4]、海洋浮标对水下设备的供电[5-6]、AUV对水下传感器的电池补电以及对水处理节点的供电[7-8]。
基于磁场耦合方式的感应能量传输(inductive power transfer,IPT)和基于电场耦合方式的电容能量传输(capacitive power transfer, CPT)是两种有效的无线电能传输方式。由于磁场耦合式具有传输功率较大,距离较远,效率较高等优点[9-11],目前国内外研究的热点主要集中在磁场耦合方式。但是IPT存在成本高、质量大、对金属敏感及产生涡流损耗等问题。而电场耦合作为同磁场耦合对偶的一种工作方式,采用高频交变电场传递能量,仅用轻薄廉价的铝板或铜板作为发射接收极,且在周围存在金属物体时,泄露电场不会在其中引起涡流损耗,对位置偏移具有很好的鲁棒性[12-13]。
CPT在动态供电、电动汽车充电等方面有优势。国外研究着重于水电耦合无线电力传输的效率改进。利用三维仿真和测量,阐明平行板电耦合器的S参数。基于该结果,通过仿真和实测结果揭示了淡水电耦合无线电力传输最大效率的频率特性[15-17]。
印度学者对不同的无线充电器拓扑结构,变压器设计方法,电池选择标准以及与可再生能源的集成进行全面的标准规范化,此外,还解释了给定系统的最大效率条件[15-17]。日本学者还通过电磁耦合的WPT在空气和水中的10 kHz~1 MHz范围内进行了测试,测量值与模拟值一致;比较了空气和水中的特性,80倍的电容差导致谐振频率附近的峰值筛选和峰值扩大;指出广泛的特征峰意味着较难受到参数改变的影响。在这种情况下,电极位置的改变导致电容的改变,使得谐振频率也随之改变[18-20]。
目前该研究在中国还处在初级阶段,研究工作开展较少,因此其深入的研究显得尤为必要。本文提出了一种较为具体的CPT系统,它能够调谐耦合电容两端电压,使其幅值尽量相等,从而减少耦合电容无功功率。
1 系统建模与分析
1.1 电路拓扑分析
1.1.1 基于LC双边式CPT系统
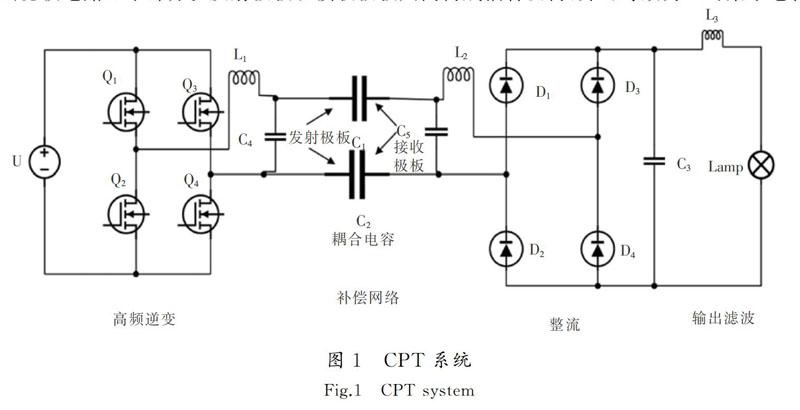
LC双边式CPT系统如图1所示,其主要包括供电直流电源、高频逆变电路、耦合机构、补偿网络、整流部分和输出滤波电路5个部分。发射极板和接收极板共同构成耦合机构,并可等效为一对集中电容。
系统的基本原理是直流电源经高频逆变电路转变为交变电压,系统通过升压网络提升电压后供给耦合单元。当两块接收极板放置在发射极板附近时,交变电场在接收极板上感应出电势差,再经过降压型网络整流滤波成负载所需的直流电压。系统的控制方式可以采用半桥式或者全桥式,本文采用全桥式逆变电路。CPT系统的耦合电容较小所以需要在高频下进行能量传输,系统直流电在高频逆变电路中转为高频交流电。
原边补偿网络和副边补偿网络由2个元件构成:串联电感L,并联电容C。补偿电感和电容的作用是降低逆变器输出无功功率。系统通过谐振提高极板间电压同时实现软开关。同样L为调谐电感与耦合电容C组成谐振网络,该拓扑结构采用全桥逆变相对于简单的CPT而言更适合于大功率场合。
发射板在高压、高频交流电作用下与接收板产生互交电场,形成位移電流实现能量的传递。
1.1.2 补偿网络拓扑分析
在电容式无线能量传输方式的CPT系统中,发射侧和接收侧电容板之间的距离会产生很大的电场损耗,两极板之间的互容相对较小漏电场很大。如果在谐振回路中不加入补偿环节,发射侧的漏电场会导致系统输入电流与电压之间的相角较大,功率因数较小,极大地增加了对供电电源容量的需求,同时还会增大开关器件的应力、不利于系统安全;而接收侧线圈的漏电场则会降低系统的输出电压增益,减弱系统的功率传输能力。所以,为了提髙系统性能实现电路电场耦合必须加入补偿环节。
电场耦合方式发射侧和接收侧谐振回路补偿环节的拓扑结构将决定整体系统的输出特性,其中原边和副边的补偿网络可为任意结构,其具体结构和参数是一个重要研究内容。目前使用较多的补偿网络为串联电感方式,也有一些较为复杂的补偿网络来实现更高功率和效率,在此设计了一种LC双边式的补偿网络,其等效电路如图2所示。
1.2 耦合极板模型建立
为了研究耦合机构的电场分布规律,考虑到计算的复杂性,采用多物理场仿真平台来进行分析。由于电容器板周围可能存在明显的弥散场,因此模型中包含了空气区域。实际上,弥散电场可以无限延伸,但其强度与距离的三次方成反比,因此场强会迅速减小,在数值上可以忽略不计。这里,假设空气体积足够大,能够准确地捕捉弥散场,可以通过增大空气体积并比较结果来检查。假设为静电条件时,每个电极整个表面的电势必须相同否则电流将流过这些导体。本次要做到分析是空气和水介质中的电势分布,不必求解电极中的电位。可以采用以下2种方法:第一,在电极上应用终端域特征,或者从物理场接口的选择中移除电极域,并在与空气或电介质的接触面使用合适的边界条件(如接地或边界终端);第二,采用一端接地,一端接电势,该方法更适用于无线充电的特征,所以此模型中采用第2种方法。
建立2块厚度为1 cm、边宽5 cm、长8 cm的方形电极模型,左右电极之间相距8 cm,极板的材料选择铜。仿真后耦合机构的电场分布情况如图3和4所示,图3为平板耦合机构对立放置时电场分布,图4为平板耦合机构的水平放置时电场分布。
2 实验平台建立与验证
2.1 实验电路设计
能量發送端采用STM32F103微处理器作为控制器,发送端产生特定频率高频互补方波用于控制功率器件工作,功率部分采用全桥驱动,MOSFET型号为LR7843。MOSFET相比于晶体管没有饱和压降,其导通电阻仅有2 mΩ且导通时间和关断时间都在40 ns以内,有效减小了导通损耗和开关损耗,提高了系统运行效率。在运行中
500 kHz开关频率下,供电电压25 V功率器件也仅仅是微热。
MOS驱动器选择HIP4082作为独立驱动4N-MOS的全桥驱动器,它具有可编程死区时间
在驱动1 000 pF负载时上升,其下降时间仅为15 ns,也为系统的高频运行提供前提条件,同时其具有贯通保护和欠压保护,为系统可靠运行提供了条件。功率电路部分如图5所示。
2.2 电路仿真
基于SIMULINK仿真平台搭建了系统电路模型,仿真获得了电压和电流波形,如图6—9所示。
图7所示由方波和阶跃信号拟合出幅值为10 V的电压,作为电路电源输入。
图8为经过降压型网络后整流滤波成负载所需的直流电压电流波形,在0~0.05 ms快速充电后进入稳定状态。
图9给出了通过升压网络提升电压后供给耦合单元的电压和电流波形,电压经升压后得到交变电压,当两块接收极板放置在发射极板附近时,交变电场在接收极板上感应出电势差。
2.3 实验验证
根据仿真结果设计制作了水下无线电场耦合传能实验系统,系统采用频率自跟踪高频逆变电源和一致尺寸的发射、接收极板组成的能量耦合机构,接收极板接收到的高频能量经整流模块转换为直流;负载采用电子负载,系统的发射、接收功率及传输效率由功率计进行测量。功率分析仪通过测量输入高频逆变电源工频交流电的电压、电流有效值来计算得到输入有功功率有效值,通过测量整流模块输出的电压电流值计算出负载消耗的有功功率有效值,从而得到系统效率。图10给出了实验获得的功率与极板距离关系。耦合极板由覆有防水胶密封的PCB板组成,极板尺寸设计为 7 cm×7 cm,频率定在300 kHz,实验平台及波形如图11—13所示。
3 结 论
本文研究了一种水下的无线电力传输系统,其电场耦合相当于电容充电的原理。在电路设计以及研究过程中发现,极板间的传输距离是此充电方式的关键问题,在水中进行电场耦合,极板间的水介质会影响电能的传输而且两个电极之间的杂散电容也会影响极板间的功率,所以由于间隙的存在极板间的功率损耗较大。提出的设计方案实现了基于水下电场耦合的无线充电器的功能,并探讨了水下电场耦合来进行无线充电的可行性。磁感应式水下无线电能传输是目前的研究热点,水下无线电能传输系统在空气、淡水、海水等不同介质中的传输特性研究有着重要意义。基于仿真软件模拟极板和电路的电场和电压电流的变化,通过实验得出极板不同间距下的功率变化结果,对于水下电力传输的效率以及充电最佳频率的选择有待于更近一步的研究。
参考文献/References:
[1] 张克涵,阎龙斌,闫争超,等. 基于磁共振的水下非接触式电能传输系统建模与损耗分析[J].物理学报,2016,65(4):334-342.
ZHANG Kehan,YAN Longbin,YAN Zhengchao,et al.Modeling and analysis of eddy-current loss of underwater contact-less power transmission system based on magnetic coupled resonance [J].Acta Phys Sin,2016,65(4):334-342.
[2] MCGINNIS T,HENZE C P,CONROY K,et al. Inductive power system for autonomous underwater vehicles [C]//Oceans. Canada:IEEE,2008:1-5.
[3] SHI J G,LI D J,YANG C J,et al.Design and analysis of an underwater inductive coupling power transfer system for autonomous underwater vehicle docking applications [J].Journal of Zhejiang Universit-Science C(Computers & Electronics),2014,15(1):51-62.
[4] HAN J,ASADA A,URA T,et al.Noncontact power supply for seafloor geodetic observing robot system [J]. Journal of Marine Science and Technology,2007,12(3):183-189.
[5] YOSHOKA D,SAKAMOTO H,ISHISARA Y,et al.Power feeding and data-transmission system using magnetic coupling for an ocean observation mooring buoy [J].IEEE Transactions on Magnetics,2007,37(6):2663-2665.
ZHAO Xiaoyun. Calculation of parallel-plate cap citor with a dielectric[J].Journal of Fuyang Teachers College ( Natural Science),2013,30(3):29-31.
[17]LIN F Y, COVIC G, BOYS J,et al. Evaluation of magnetic pad sizes and topologies for electric vehicle charging[J]. IEEE Transactions on Power Electronics, 2015,30(11):6391-6407.
[18]FUKUDA H,KOBAYASHI N,SHIZUNO K,et al.New concept of an electromagnetic usage for contactless communication and power transmission in the ocean[C]//2013 IEEE International Underwater Technology Symposium.Tokyo:[s.n.], 2013;1-4.
[19]TANG Y Y,ZHU F,WANG Y X,et al. Design and optimizations of solenoid magnetic structure for inductive power transfer in EV applications [C]// Industrial Electronics. Japan:IEEE,2016;1459-1464.
[20]SHI J G,LI D J,YANG C J,et al. Design and analysis of underwater inductive coupling power transfer system for autonomous underwater vehicle docking applications[J]. Zhejiang Univ-Sci C(Comput & Electron), 2014,15(1):51-62.
猜你喜欢
中国教育技术装备(2016年22期)2017-03-02
山东工业技术(2016年24期)2017-01-12
考试周刊(2016年101期)2017-01-07
艺术科技(2016年9期)2016-11-18
艺术科技(2016年9期)2016-11-18
考试周刊(2016年66期)2016-09-22
考试周刊(2016年44期)2016-06-21
电脑知识与技术(2016年9期)2016-05-18